变电站巡检机器人的应用技术探析
2018-05-26谢旭琛陈晓鹏石基佘文锦
谢旭琛,陈晓鹏,石基,佘文锦
(广东电网有限责任公司惠州供电局,广东 惠州 516001)
对变电站电气设备的运行状况进行定期巡检,是确保变电站安全稳定运行、保证电力供应稳定性的关键。采用巡检机器人代替传统的人工巡检模式,实现变电站电气设备运行的自动化巡检,以减少传统人工巡检的各种问题因素,对确保变电站电气设备的安全稳定运行甚至推进国家智能电网建设都有着十分积极的作用和意义。
1 变电站巡检机器人的系统组成与结构分析
变电站巡检机器人采用客户端与服务器连接的系统模式,其中客户端通过与主控室的计算机服务器进行连接,以实现对巡检设备以及巡检机器人动作的控制。其中,主控制室中服务器对机器人动作的控制是依靠机器人自身携带的计算机来实现,控制内容包括机器人的运动系统、导航定位以及数据采集和传输等。总之,变电站巡检机器人的系统结构中,服务器是实现其运行保障的核心部分,而客户端与服务器之间的通信传输,是通过无线网络连接的形式来实现,并且无线网络在实现客户端与服务器之间数据通信与传输中,需要具备较高的带宽与通信连接的实时性特点,并且其抗干扰能力与可靠性均比较高。如图1所示,即为变电站巡检机器人的系统网络连接拓扑结构图。

图1 变电站巡检机器人网络连接拓扑结构示意图
根据变电站巡检机器人的网络连接拓扑结构,结合变电站巡检机器人的系统功能与作用可见,其系统组成一般由变电站控制中心、现场巡检机器人、无线网络3部分组成。其中,变电站控制中心与现场巡检机器人结构中所包含的功能模块与应用的技术形式均比较复杂。
2 关键技术分析
根据上述对变电站巡检机器人系统结构与网络连接组成的分析可见,在变电站巡检工作中,巡检机器人通过按照制定的巡检线路,对监测点的电气设备进行巡检,并将巡检数据向主控制室传输,以完成对变电站电气设备运行状态的掌握和及时维护管理等,从而保障变电站的安全可靠性运行。其中,巡检机器人在监测点进行巡检所采用的方式主要以视频检测与红外检测为主,而机器人按照制定线路进行行走中,以自主行走与远程的人工控制两种方式为主,从而对其行走路线与制定路线之间的安全性与可靠性进行保障,并且能够根据其行走状态,在故障或异常情况下进行合理地处理与解决。此外,在机器人巡检过程中,主控制室的操作人员能够通过操作实现对机器人巡检设备的远程控制。由此可见,变电站巡检机器人系统设计中所应用到的关键技术,主要以巡检机器人自身所带的控制技术以及对变电站检测电气设备的自动定位技术、巡检机器人远程监控与遥控操作技术等。而巡检机器人自身所带控制技术中以导航技术为核心,它对巡检机器人按照制定路线进行巡检并实现获取变电站电气设备监测点中的各种数据信息有着非常重要的作用。其中,巡检机器人在按照制定路线行走以进行巡检的过程中,有直线行走和转弯的两种情况,都需要通过导航控制来实现。
2.1 机器人本体控制技术
首先,机器人本体控制的实现,需要通过磁导航以及RFID定位、多传感器融合等先进技术设备与系统设计应用,通过在变电站地面进行磁条安装,与摄像头联合实现机器人本体的导航控制,并且在该系统的技术应用中,为实现机器人所处位置的确定,需要在其巡检路线的相应间隔距离之间进行RFID标签设置,以通过机器人本体控制系统中的读写器去实现RFID标签的读取,对其定位进行确定和控制,从而实现以机器人的导航定位进行机器人本体的控制。图2为机器人本体控制系统的技术方案示意图。
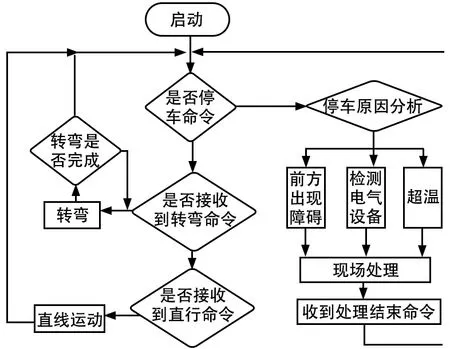
图2 变电站巡检机器人本体控制技术方案示意图
此外,机器人本体控制中还包括对机器人直线行走以及转弯、停车等行走状态的控制,以结合机器人不同状态进行不同的控制来实现。其中,对机器人直线行走的控制设计是以内外控制结合的形式来实现,以内环控制为主,通过外环辅助控制作用,对机器人直线移动以及直线移动下前进的方向进行校正控制实现。内环控制在进行机器人直线移动控制中,是结合机器人小车的两轮速度差在进行PID计算以及速度校正下,对其直线行走状态进行保障。机器人直线行走过程中,一旦小车两轮速度出现偏差,就会通过控制系统对其具体偏差参数进行计算,并通过调整其轮子的驱动转速,实现其直线行走控制。而外环控制在实现机器人小车前进方向的校正中,通过在机器人的前端进行磁传感器的安装与磁钉位置变化,对移动机器人的位置进行准确定位确认,在出现偏差情况下,通过控制程序计算偏差,调整小车两轮驱动电机的转速以及方向,以实现机器人前进方向的校正和控制。最后,机器人行走中转弯控制是以原地直角转弯的方式去实现,见图3。
2.2 变电站电气设备自动定位技术
变电站巡检机器人中,实现变电站电气设备自动定位的设计,是RFID技术,它作为一种广泛应用的新型自动识别技术,在物联网环境下的设计应用与作用优势尤为显著。通过RFID标签进行相应格式的数据存放,在构建标签ID与数据关系的基础上,通过RFID读写器进行标签信息读取,以实现有关信息获取,为控制命令下达以及控制实施提供依据。值得注意的是,由于RFID标签在变电站电气设备自动定位的应用中,其成本相对较高,因此可以通过RFID标签实现监测点标识,以减少其应用数量,再通过机器人本体的RFID读卡器,对标识监测点的RFID标签信息读取进行判断,并实现变电站电气设备监测点以及关联电气设备的识别定位。
2.3 巡检机器人远程监控与遥控操作技术
变电站巡检机器人的远程监控与遥控操作主要包含远程通信、视频显示与控制、机器人本体运动控制3大部分。机器人巡检运行中,通过自身配备的红外摄像仪、可见光摄像机等装置,运用自主控制和遥控可实现对变电站电气设备的巡检,以及时发现电气设备运行故障及隐患,并提供相应的数据支持,为设备维护提供依据。图4为巡检机器人远程监控与遥控操作的通信技术。
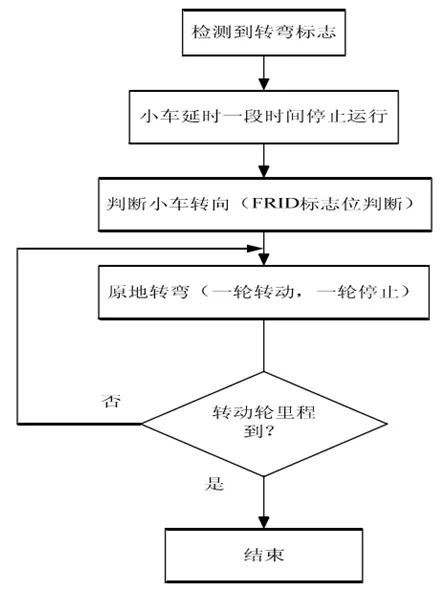
图3 巡检机器人转弯控制技术方案

图4 巡检机器人远程监控与遥控操作的通信技术
3 结语
总之,变电站巡检机器人的应用技术研究,有利于促进变电站巡检机器人关键技术在其系统设计中的实现,从而推动巡检机器人的推广应用,对变电站运行维护自动化与信息化建设和提升有着积极的作用与意义。
参考文献:
[1]钱平,徐街明,张永,等.变电站巡检机器人监控系统实现技术与应用功能设计[J].电力信息与通信技术,2017,15(12):19-24.
[2]蔡焕青,邵瑰玮,胡霁,等.变电站巡检机器人应用现状和主要性能指标分析[J].电测与仪表,2017,54(14):117-123.
[3]杨旭东,黄玉柱,李继刚,等.变电站巡检机器人研究现状综述[J].山东电力技术,2015,42(01):30-34.