宽厚板轧制过程中基于图像处理系统的全自动转钢和展宽技术
2018-05-25王璐
王 璐
(山东国舜建设集团有限公司, 山东 济南 250000)
在钢板轧制过程中,为满足成品宽度的要求,往往需要增加钢板展宽道次。操作员通过主令控制给出命令,PLC接收到命令后转化为正负相反的速度给定,传送给间隔排列的两组锥形辊道变频器,通过锥形辊道的反方向运行,实现钢板旋转,操作员通过观察判断是否展宽结束。手动转钢流程图如图1所示。

图1 手动转钢流程图
传统的转钢展宽需要操作人员通过观察确定钢板停车位置,并通过主令控制转钢角度,手动干预大大延缓了自动轧制的节奏,增加轧制时间。操作人员难以匹配二级数据下发的钢板咬入时间和轧制温度,从而导致同一种钢种由于不同人员操作出现轧制力不同,钢板厚度受到影响。
随着机器视觉技术的发展,在工业技术领域中用机器代替人眼来做测量和判断成为一种可能。采用CCD照相机将被检测的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来抽取目标的特征,根据判断条件输出结果。
1 钢板自动跟踪定位和机器视觉技术实现全自动转钢
1.1 钢板的物料跟踪
1)轧钢区域辊道采用西门子6SE70系列变频器控制,控制方式为带速度编码器的矢量控制,6SE70变频器接受一级自动化系统的命令,并将实际速度反馈到一级自动化系统,辊道线速度在时间上的积分作为物料跟踪的依据。
2)钢板物料跟踪的修正。为了避免钢板在辊道上运输时由于打滑等原因出现跟踪误差,利用热金属检测器对钢板的实际位置进行修正,由于热金属检测器的位置是固定的,每次修正后重新对钢板位置从时间t0进行积分,以达到更新钢板位置的作用。经过热金属检测器修正后的位置即认为是钢板头部的实际位置。再根据二级自动化系统传送的钢板长度,可算出钢板展宽前的中心位置。物料跟踪系统示意图如图2所示。
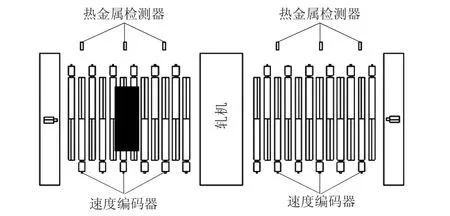
图2 钢板跟踪定位示意图
1.2 基于机器视觉的图像采集及处理系统
机器视觉是一项综合技术,包括图像处理、机械工程技术、控制、电光源照明、光学成像、传感器、模拟与数字视频技术、计算机软硬件技术。一个典型的机器视觉应用系统包括图像捕捉、光源系统、图像数字化模块、数字图像处理模块、智能判断决策模块和机械控制执行模块[1]。机器视觉系统最基本的特点就是提高生产的灵活性和自动化程度。在大批量重复性工业生产过程中,用机器视觉检测方法可以大大提高生产的效率和自动化程度[2]。
本文中的图像采集及处理系统是实现自动转钢和展宽轧制的关键部分,硬件部分由CCD摄像机、LED线性光源、视频采集卡、图像处理器和输入输出设备组成,如图3所示。

图3 图像采集及处理系统结构图
在轧机机前锥形辊道入口处和机后锥形辊道出口处设CCD摄像机,采集转钢前后的钢板位置图像,利用边缘检测技术检测钢板边缘轮廓,在摄像机坐标下采集钢板的边缘信息,并拟合出钢板边缘线段的斜率。通过判断处理将展宽道次结束信号反馈给轧钢自动化系统。
具体算法如下:
1)Canny边缘检测一共分为四个步骤:对原图像进行高斯滤波平滑;对高斯平滑后的图像用Sobel算法进行边缘检测,即幅度和方向计算;对检测后的图像进行非极大抑制,仅仅得到全局的梯度并不足以确定边缘,因此为确定边缘,必须保留局部梯度最大的点,而抑制非极大值[3];连接边缘点进行滞后阈值处理,对非极大值抑制图像作用两个阈值th1和th2后的图像1和图像2,以图像2为基础,以图像1为补充来连结图像的边缘。
2)最小二乘法说明。在科学实验的统计方法研究中,往往要从一组实验数据(xi,yi)中寻找出自变量x和因变量y之间的关系y=ax+b。由于观测数据往往不准确,因此并不要求y=f(x)经过所有的点(xi,yi),而只要求在给定的点xi上误差∂=f(xi)-yi按照某种标准达到最小,通常采用欧氏范数∂^2作为误差量度的标准。这就是所谓的最小二乘法。
判断依据为当斜率值变化90°(误差5%)时,判定钢板展宽结束,输出展宽结束信号给轧机PLC系统,作为推床对正的触发信号。
1.3 图像采集及处理系统与一级自动化系统的通讯
钢板图像采集及处理系统与轧钢自动化系统的通讯可以有两种方式:一是图像采集及处理系统的输入输出单元通过线路直接连接到一级自动化系统的输入输出模块;二是将图像采集及处理系统接入一级自动化工业系统的工业以太网。二者之间的通讯主要包括以下数据交换:
1)钢板图像采集及处理系统发送到轧机自动化系统的数据:系统状态、转钢允许、钢板转钢展宽完毕。
2)轧机自动化系统发送到钢板图像采集及处理系统的数据:钢板到达展宽位置信号、推床打开状态信号、推床打开状态及对正状态信号。
自动展宽系统结构图见图4。

图4 自动展宽系统结构
2 应用情况
在实际应用过程中,板坯停车位置准确,经过锥形辊道转钢后角度偏差10°左右即不对推床的动作造成影响。为解决运行中由于高温辐射导致摄像机死机问题,增加摄像机压缩空气冷却,同时为解决高压水除磷和轧辊辊身冷却系统造成的水蒸气问题,增设轴流风机吹扫。自动转钢效果示意图见图5。

图5 自动转钢效果示意图
3 结语
本文给出了一种在钢板轧制过程中全自动展宽技术解决方案,利用机器视觉系统进行数据采集和判断,运行过程中系统稳定、故障率低、抗干扰能力强,解决了钢板在全自动轧制过程中人工干预的问题,对于轧钢温控系统、轧钢辊缝调节系统、主传动系统的安全有效运行起到良好的改善作用。
[1]朱明,鲁剑锋.基于DSP+FPGA结构图像处理系统设计与实现[J].计算机测量与控制,2004(9):866-867.
[2]邢青青,罗新斌.基于机器视觉的对中控制系统[J].有色金属加工,2009(4):45-47.
[3]余洪山,王耀南.一种改进型Canny边缘检测算法[J].计算机工程与应用,2004(20):27.