现代测绘技术在地铁隧道变形监测中的应用研究
2018-05-24张文春徐正元张理想马金峰
张文春 徐正元 张理想 马金峰
(吉林建筑大学 测绘与勘查工程学院,长春 130118)
0 引言
城市轨道交通是城市公共交通的骨干.其中,地铁系统以其运量大、空间利用率高、安全节能等特点,成为当今城市化进程中优化城市交通的有效手段.地铁建设和运营会带动沿途经济及城市建设的发展同时,会因地铁施工及沿线城市建设所造成的土体应力状态变化导致建筑物、构筑物及地铁结构的变形,从而产生安全隐患.在地铁施工运营及地铁保护区范围内的工程活动中,地铁保护监测成为保护地铁及沿线建筑结构安全、确保市民安全出行的必要手段.地铁变形监测的主要工作就是利用直接或间接获取隧道结构的三维空间信息.传统地铁保护监测方式,如收敛计位移监测、全站仪拱顶位移监测、水准仪隧道结构沉降监测等,因功能单一、人工测量工作繁杂、观测时段受限等,已经不再适应当今高效率地铁施工进度和高密度地铁运维工作.随着测绘科学的不断进步、施工测量工艺的不断改进及电子仪器技术、信息技术的不断发展[1],如自动化全站仪地铁监测系统、三维激光扫描技术及近景摄影测量技术等,已经逐步应用到地铁保护监测工作当中.
1 全站仪自动化监测系统
全站仪自动化监测系统是集电磁波测距技术、数据库技术、移动互联网通讯及自动目标识别技术等,利用计算机语言开发,基于服务器、控制器、客户端等硬件的C/S架构的自动化测量系统(见图1).
国内外行业专家对该类系统进行了多方面的理论论证和开发应用.1983年,Hannover大学利用相机及数字影像处理技术成功实现测量目标的准确定位,利用无线电通讯装置实现了数据传输,这就是现代化测量机器人监测系统的雏形;张书华基于TCA200型全站仪开发了隧道变形自动监测系统[2];徕卡公司自1997年于香港九龙塘首次地铁自动化监测试验成功以来,一直致力于自动化监测系统的开发和完善,至今,依托高精度TS(TM)30型测量机器人开发的GeoMoS自动化监测系统已经被国内外广泛认可和应用;裴运军(2011)对该系统的观测精度进行了分析评定[3];徐正元(2017)在实际工程中对该系统进行沉降监测的可靠性进行了长期的实际观测和理论分析,并对观测结果进行了精度评定[4];GeoMoS监测系统在沉降监测中采用高精度测量机器人结合中间法进行三角高程解算,其精度受mα,ms,mk影响.
由上式计算极限误差最大值Δmax限=2mh≈0.014 72mm.此精度符合国家一二等水准测量规范要求.
该系统在待测区域内布设控制网,于各断面布设小棱镜,基于全站仪免棱镜测距及ATR技术实现自动化空间信息获取,其位移精度可达±0.3mm[3].在实际工程应用中,以高精度电子水准仪观测沉降数据为准,对比该系统在沉降监测中的实际成果(如图2所示).红色点为隧道监测点实际沉降情况,蓝色点拟合曲线为自动化监测数据所反映沉降情况.由此可见,自动化监测曲线在人工监测值上线波动,与人工监测值上下偏差最大为+0.22mm至-0.18mm,整体趋势吻合情况良好[4].
结合精度评定及工程实践可见全站仪自动化监测系统可实现对地铁隧道高精度、全天时全天候、自动高效的变形监测.

图1 全站仪自动化监测系统Fig.1 Total station automatic monitoring system

图2 自动化监测值与人工监测值对比曲线图Fig.2 Comparison curve between the automatic monitoring data with manual monitoring data
2 三维激光扫描技术

图3 技术流程图Fig.3 Flowchart
相比传统监测方式和自动化监测技术而言,三维激光扫描技术作为变形监测领域的前沿技术,利用高速激光测距技术配合精密时钟编码器量测隧道实体空间离散矢量距离点即点云.在扫描仪独立坐标系下的斜距、水平方向及距离、天顶距、反射强度等信息,配合CCD传感器解算空间实体拓扑信息,经过对点云数据的配准、抽稀、去噪及滤波等过程,最终实现对空间实体线、面、体等空间信息数字化高还原度重构.三维激光扫描技术以其观测快速、主动式非接触测量、抗干扰能力强、数据精度高、成果直观等特点,适用于现代地铁高效施工及高频率运营维护中隧道变形监测工作.
在利用三维激光扫描技术实现隧道变形监测的研究中,通过随机采样一致性(RANSAC)[6]及最小二乘算法来实现对隧道中轴线的提取,利用不变矩实现隧道连续断面的提取,最终利用局部曲面拟合及最小二乘曲线拟合完成变形曲线拟合分析,得到变形信息技术流程如图3所示.实际工程案例中,使用Z+F三维激光扫描仪及瑞士Amberg公司开发的基于隧道中轴线及连续断面提取的变形监测系统TMS TunnelScan,来实现三维激光扫描技术在地铁隧道监测中的应用研究.

图4 测站隧道点云示意图Fig.4 Point cloud of tunnel scan data
在TMS TunnelScan监测系统中,程序通过键入的监测隧道的设计轴线及设计半径信息解算并拟合出理论中线以及里程对应的设计断面[7].三维激光扫面仪所采集的点云数据经预处理后转码并加载到程序如图4所示.
经中轴线、连续断面提取并截取到对应里程点断面与设计断面进行叠加对比,从直观模拟影响及量化隧道断面空间数据指标对隧道进行超欠挖断面分析和方量报告、断面收敛和错台分析、侵界检测、砌衬厚度、方量、渗水影像、裂缝影像、地质素描、平整度分析等多元监测评价.断面理论半径与实际半径对比分析及多期断面实际半径叠加分析可直观反应隧道结构变形情况,并对该系统进行数据精度评定,如图5所示.

图5 隧道断面变形监测成果示意图Fig.5 Deformation monitoring results of tunnel section



图6 实测半径与设计半径差值柱状图Fig.6 Histogram of difference between measured radius and design radius

3 传统监测手段与现代监测方法的对比分析
相比之下,地铁保护监测工程中传统监测手段较比现代化监测方式存在如下不足:
(1) 针对不同监测单项任务的传统变形监测手段,因不同仪器的精度和功能所限具有局限性,如普通全站仪三角高程测量精度所限,仅应用于位移监测,而不能用于沉降监测,而沉降监测中则需使用高精度水准仪再次观测,影响监测效率.
(2) 因人工监测与地铁运营的空间冲突具有观测周期的不连续性(在地铁运营期间),人员和仪器不能进入隧道施测,需等晚间地铁停运维护期间进行观测,从而造成大于12h的观测空白期,影响监测质量.
(3) 因传统测量仪器作业方式和观测效率所限,具有观测数据离散性,如全站仪隧道位移监测及水准仪隧道沉降监测中,仅能对少量固定变形特征点做到坐标采集,无法在观测周期内采集更多隧道点空间信息,无法对被测隧道做到空间位置的完整还原和整体监测.
由此可见,传统变形监测手段已经不再适应当今高效率地铁施工进度和高密度地铁运维工作.全站仪自动化变形监测系统以及三维激光扫描变形监测系统,以其独特的数据采集方式和先进的信息化数据处理系统,可以做到全天时全天候、高效率高精度、多维度自动化的监测.传统变形监测手段与现代化变形监测方式综合对比见表1.
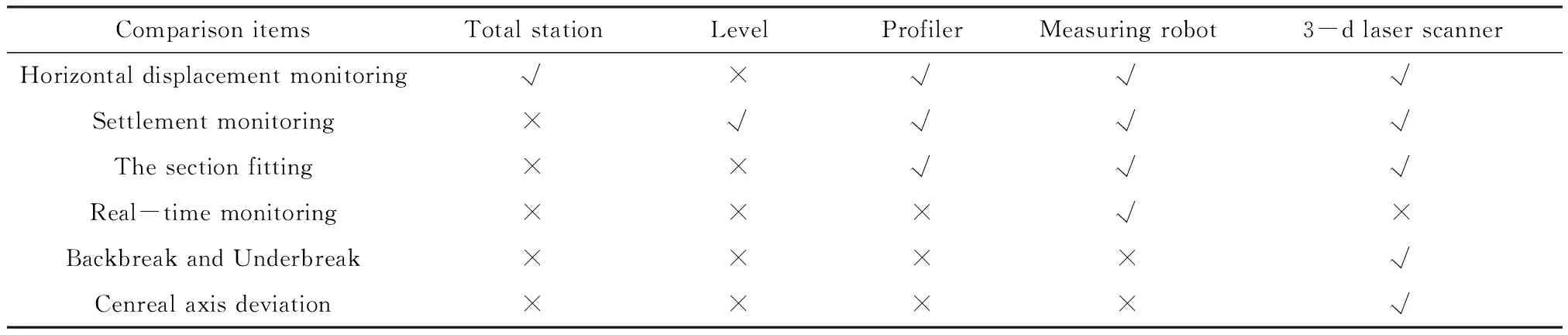
表1 传统与现代监测方式综合对比Table 1 Comprehensive comparison of traditional and modern monitoring methods

续表1
4 结论与展望
应用实践的数据成果质量分析证明,以全站仪自动化监测系统和三维激光扫描技术为代表的现代化地铁隧道监测方式,在作业效率、数据精度、自动化及功能多元化方面,比传统的监测手段有了显著的提高,其精度评定结果和工作稳定性实践证明,现代化监测系统是可靠的.以GeoMos为代表的全站仪自动化监测系统以其全天时全天候、自动化的特点,已经逐步取代传统监测方式并广泛应用于地铁保护监测工程之中.目前三维激光扫描技术正成为高校、科研院所及企业在地铁隧道监测应用中关注的重点.在点云数据拼接和处理、隧道中轴线及连续断面提取的过程中,精度的提高、效率的改善仍是当下应用研究的重点方向.利用更加优化的算法对隧道监测工程中诸多子项开发更加成熟、更有针对性的应用程序,并进行理论论证和工程检验,尚有广阔的研究开发前景.
参 考 文 献
[1] 邱冬炜.穿越工程影响下既有地铁隧道变形监测与分析[D].北京:北京交通大学,2012.
[2] 张书华,蒋瑞波.基于测量机器人的隧道变形自动监测系统的设计与实现[J].测绘科学,2009,34(3):192-194.
[3] 裴运军.在地铁隧道自动化变形监测中的应用[J].湖南水利水电,2011(6):31-33.
[4] 徐正元,张文春.GeoMoS监测系统在地铁沉降监测中的应用研究[J].科技创新导报,2017,14(13):19-22.
[5] 冯显堂.大气折光系数的取值[J].鞍钢技术,1996(2):47-50.
[6] 托雷.基于三维激光扫描数据的地铁隧道变形监测[D].北京:中国地质大学,2012.
[7] Park J H,Kim M H,Park K H.Achievements and Tasks of the SMRT Tunnel Monitoring System(TMS)[J].2012,15(4):381-387.