遮光法槽式聚光系统追光传感模块设计
2018-05-23,,
,,
(1.湖南科技学院 电子与信息工程学院, 湖南 永州 425199;2.湖南远健光能科技有限公司,湖南 永州 425000)
0 引言
太阳能是一种清洁的新兴能源。目前大规模的太阳能利用主要有光伏发电和光热发电两种。光热发电是一个新的应用研究方向,主要有槽式,蝶式和塔式聚光发电系统[1]。其中槽式聚光系统应用最广泛[2]。追光传感模块是槽式聚光系统的核心部件,其测量精度决定槽式聚光系统的追光准确度,是研究的热门[3]。目前常用的方法有根据时间计算太阳位置的主动追光法和使用光传感器测量太阳位置的被动追光法。主动式追光法控制简单,但是累积误差大。被动式追光法精度高,但是太阳光照强度太大,远远超过普通光电传感器测量的线性范围,直接使用光电传感器测量太阳位置困难大。本文设计了一种使用遮光板和光敏电阻进行太阳位置判断的方法,实验证明该方法简单实用,追光准确,能够满足槽式聚光器系统需求。
1 遮光法追光原理
1.1 槽式聚光原理
槽式聚光系统由支架,聚光器和集热管组成,系统结构如图1所示。聚光器为抛物面反射镜,集热管的轴线与聚光器的焦线重合。当太阳光垂直入射到聚光器时,经过反射后所有的光都汇聚到聚光器焦线上,从而集热管能够接收到所有的反射光,形成较高的温度。根据几何光学分析法,入射到聚光槽两端的光线是集热管能够收集的光线的最大范围,只要这条光线能够照射到集热管上,则其他发射光也就都会照射到集热管上。又由于,聚光槽和集热管都是几何对称的,因此只要对两端的光线进行讨论就可以得出聚光槽能够允许的最大太阳光入射角偏转角。
图1中实线表示垂直入射到聚光器最两端光线的路径。当太阳光不能垂直入射时,反射光线偏离聚光器的焦线。用α表示入射光线与法线的夹角。随着太阳的运动,入射光倾斜程度增加,α进一步增大。当反射光线刚好要离开集热管时,反射光线与集热管相切,如图1中虚线所示,以左边的光线为例进行讨论。此时α达到最大允许值,用αmax表示。为了让光线再次反射到集热管上,此时就需要驱动整个支架进行追光。聚光器焦线到聚光器一端的长度用L表示,集热器的半径用r表示。则根据几何知识可得如下表达式。
(1)
从式(1)中可以看出,最大偏转角αmax的大小与集热管半径及焦线到端点的长度有关,与抛物线的数学函数无关。在工程上为了提高聚光系统集热比,常用增加聚光槽开口度的方法,开口度增加会导致L加大,从而αmax会减小。即,系统追光精度需要提高,追光的次数需要增加。
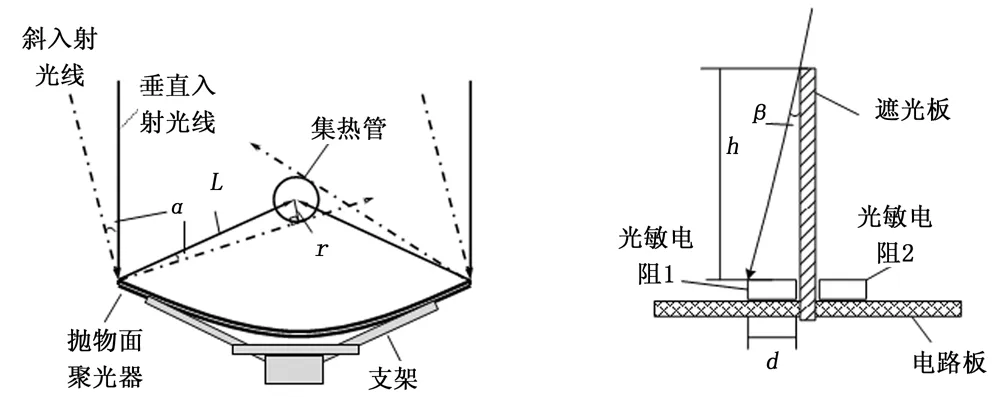
图1 槽式聚光系统图 图2 光传感模块结构图
1.2 遮光法测光原理
为了准确的测量太阳位置,设计光传感模块如图2所示。在电路板上放置一块与电路板垂直的遮光板,放置两个光敏电阻在遮光板的两边,光敏电阻的受光面垂直向上。光敏阻值大小与光照强度成反比。传感模块安装在槽式聚光系统支架上,确保遮光板与聚光器法线方向平行,且光敏电阻面向太阳。当太阳光垂直入射时,光敏电阻1,光敏电阻2接受到的光照强度相同;当太阳光倾斜入射时,其中一个光敏电阻被遮光板部分遮挡,受到的光照强度变低,电阻值增大。用β表示太阳光入射角度与遮光板的夹角,则β与光敏电阻阻值大小成正比。当β大于某个值时,其中的一个光敏电阻将全部被遮光板挡住,无法接受太阳光直射。β继续增大,则光敏电阻值不再变化,β与光敏电阻的正比关系破坏。此值为β的最大值βmax,是追光传感模块能够测量的最大太阳偏转角。光敏电阻宽度用d表示,遮光板高度用h表示,则根据几何知识可得。
(2)
随着太阳位置变化,光敏电阻从有太阳光照变成完全无太阳光照的瞬间,受到的光照强度发生较大程度的跳变,其阻值也发生较大程度的跳变。阻值的跳变是容易通过电路系统检测到的。若以这个跳变作为聚光系统追光的判决点,则追光方法具有很好的可实现性。为了利用这个跳变,则需要取槽式聚光系统太阳入射光线与法线夹角的最大值αmax与追光传感模块的最大检测太阳偏转角βmax相等,即:
αmax=βmax
(3)
由式(1)、(2)、(3)计算可得:
(4)
式(4)中,L表示聚光器抛物线焦点到聚光器边沿的长度,r表示集热器的半径,d表示光敏电阻的宽度。当槽式聚光系统制作好后,可以根据相关参数计算出遮光板的高度。
进一步根据式(2)讨论可以知道,当h增加时,βmax变小,出现βmax<=αmax。其结果是,在聚光器的反射光线完全移出集热管之前,系统就会启动追光,这种情况是可取的。相反,h减少,则反射光移完全移出集热管后,还没有启动追光,这种情况是不可取的。在工程实际中,由于工程误差等存在,所取遮光板高度应略高于式(4)计算所得值。
1.3 追光模块设计参数
本设计中所使用的槽式聚光系统,其集热管半径r为25 mm,聚光器焦线到聚光器一端的长度L为483 mm。选用龙信达公司的光敏电阻,其宽度d为5 mm。根据式(4)计算出遮光板的高度为:
(5)
根据前面的讨论,工程上制作的遮光板的高度应略高于计算值,具体的高度需要根据聚光系统的安装完成后进行调试确定。
2 追光模块设计
2.1 硬件设计
基于前面的原理分析,设计追光模块系统,硬件方框图如图3所示。光传感模块中的两个光敏电阻分别与固定阻值电阻串联分压后,输出电压经过ADC模块转换成数字信号后输入单片机。单片机对数据进行处理,判断太阳的位置,根据判断结果决定是否输出控制信号给追光电机驱动电路,启动电机追光。

图3 追光模块硬件方框图
2.1.1 光敏电阻测量
设计选用了深圳龙信达公司型号为LSD5506的光敏电阻。经过测试选用了两个性能接近的样品。在太阳光直射时其电阻值分别为:36.5欧姆和40.6欧姆;在部分被遮光时,根据遮光面积不同,阻值分别处于36.5~51.2欧姆及40.6~62.4欧姆之间;在完全遮光时分别为144.6及146欧姆。使用一个阻值为220欧姆的电阻与光敏电阻串联。在参考电压为5 V时,两个光敏电阻样品在不同光照情况下的电阻值如表1所示,经过理论计算得出理论ADC值也填入表1中。

表1 光敏电阻与光照强度对应表
2.1.2 单片机及外围电路
为了减少器件数量节约成本,选用了Atmel公司的atmega16单片机。该单片机使用了精简指令集,处理速度快,市场用量大价格低容易获取,且其内部集成了12位ADC模块,且有8个ADC通道,满足本项目设计需求。设计中,使用了atmega16的内部振荡器工作频率设置为8 Mhz。ADC的转换参考电压使用电感与系统电源隔离,且外接5 V稳压管进行稳压。
2.1.3 追光驱动电路
追光驱动电路由两个继电器及其控制电路组成。继电器可以承受250 V 3 A交流负载和30 V 10 A直流负载。本项目使用的追光电机为推杆电机,额定电压为12 V,额定功率30 W小于继电器最大直流负荷。电机通过改变直流供电电压正负极性控制推杆伸长或者缩短。设计中继电器的常闭端接地,常开端接12 V电源。两个继电器输出端分别接到电机的电源线。两个继电器断开时,电机不工作。一个闭合时推杆伸长,则另一个闭合时推杆缩短。若两个同时闭合电机也不工作,这样可以有效避免软件硬件故障导致电机烧坏的问题。
2.2 追光算法分析

图5 软件流程图
用ADC_east表示东边光敏电阻输出电压值,ADC_west表示西边光敏电阻输出的ADC值。硬件设计使得ADC值与光敏电阻阻值成正比,与太阳光照强度成反比。实验测试发现光敏电阻在有太阳照射和无照射时电阻值有较大差异,故其ADC值也存在较大差值,因此可取一个数值ADC_th作为有光无关的判决阈值。比较ADC_east,ADC_west与ADC_th的大小,可以获得以下4种状态:
1) ADC_west>ADC_th且ADC_east>ADC_th,表示两个光敏电阻都没有太阳直射,这说明光照不足,记为no_sun状态。造成的原因有可能是天气情况,比如阴、雨、雪、多云等,也可能是进入到夜晚时间段。
2) ADC_west
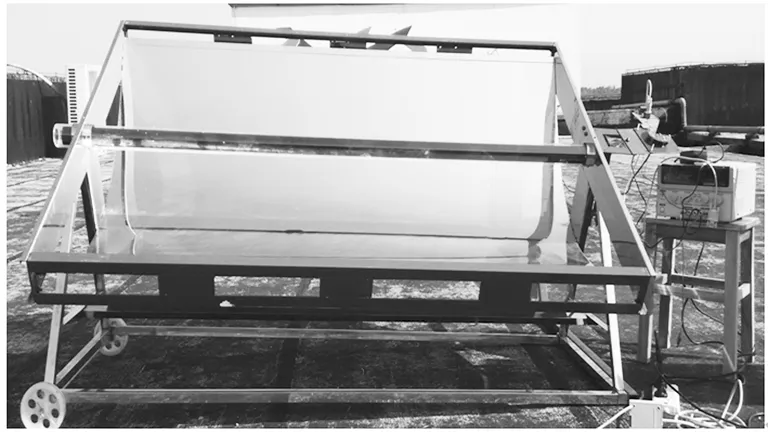
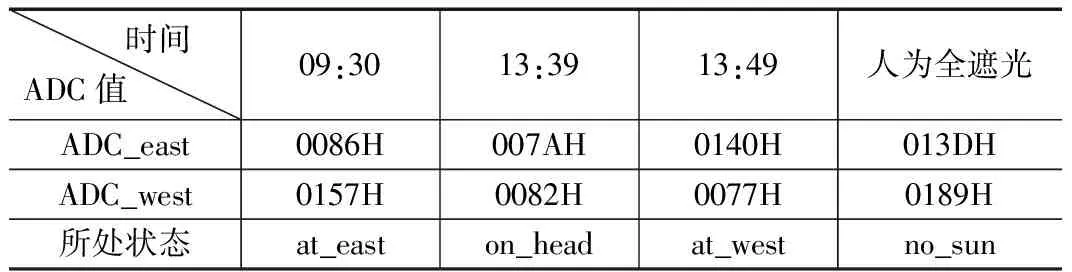
3) ADC_west>ADC_th且ADC_east 4) ADC_west 上述4种状态之间的转换关系可用图4所示状态转换图表示。 图4 状态转换图 系统默认进入no_sun状态,即认为天气光照不足。此状态下,系统不追光,持续监控太阳光照情况。若太阳照射强度增加则可能进入到另外三种状态之一。太阳在西边,则进入at_wet状态,太阳直射则进入on_head状态,太阳在东边则进入at_east状态。 at_east状态下,系统启动电机向西追光,直到进入on_head状态。若在追光过程中,天气变化导致光照不足,则进入no_sun状态。 on_head状态下,系统不追光,持续监控太阳光照情况。随着太阳位置向西自然运动,系统将会进入到at_west状态。正常情况下,不会进入到at_east状态。 at_east状态下,系统启动电机向东追光,直到进入on_head状态。若在追光过程中光照不足,则进入no_sun状态。 根据追光算法,使用状态机设计单片机软件。软件主体为一个死循环,如图5所示。首先进行单片机内部寄存器初始化,设置状态变量用于保存系统状态,并初始化状态变量为no_sun,然后系统进入主循环。在主循环中,根据状态变量的值进入相应的状态处理函数,处理函数运行完毕,返回主循环。 四个状态处理函数结构大体相似,首先进行电机处理,然后读取ADC值,然后进行状态更新。下面以no_sun状态为例讨论软件流程。图5(b)为no_sun状态处理函数流程图。no_sun状态下,首先关闭电机,读取两个通道的ADC值,并分别赋值给变量ADC_east和ADC_west,然后把这两个ADC值与阈值ADC_th进行比较。结合追光算法中介绍的判决依据,程序依次对四种条件进行判断,根据判断结果更改主函数的状态变量值,并返回主循环。返回主循环后,系统进入新的状态处理函数。 由状态转换图可以看出,on_head状态下,系统不会进入at_east状态,因此可以省去进入at_east状态的判断分支。但是保留这个分支并不会增加软件负担,带来的延时也是非常小的,同时还可以增加程序的容错性,因此保留此分支,使得on_head处理函数与no_sun状态处理函数完全相同。 另外两个状态处理函数需要特别处理的是:at_east状态下需要启动电机向东追光,因此把no_sun处理函数的“关闭电机”改成“向东追光”即可;at_west处理函数则改成“向西追光”。此外,at_west状态下,进入on_head状态的判决条件与其他状态不同。其判决条件应该为“ADC_west 制作追光模块如图6所示,将追光模块安装到图7所示槽式聚光实验系统,并进行了测试。ADC_th设置为0100H。当系统处于on_head状态时,聚光器反射光汇聚成一条光带,且全部照射到集热管上;当系统处于at_east状态时,电机开启,聚光器向东转动,直到光带照射到集热管上时,电机停止,系统重新进入on_head状态;当系统处于at_west状态时,电机驱动聚光器向西转动,系统进入on_head状态,继续向西转动,直到遮光板的影子略微遮住西边光敏电阻时停止。这就说明实现了避免系统状态震荡的目标。 图6 追光传感模块实物图 图7 槽式聚光实验系统 2015年12月16日于湖南省永州市零陵区湖南科技学院弘毅楼7楼顶,对系统进行了测试,测得数据如表1所示。表中数据用16进制记录。从测试结果分析可知, 1)上午9:30分,ADC_east为0086H,小于阈值0100H,说明光照充足,同时ADC_west为0157H,说明西边电阻被遮光,太阳处于聚光槽法线的东边。系统判断为at_east状态,与实际情况相符;同时观察发现,该状态下电机转动追光,直到停止时,进入on_head状态。 2)13:39分,两个ADC值分别为007AH和0082H,说明两个光敏电阻都处于直射状态,此时系统判断为on_head状态,与实际情况相符;同时观察发现,聚光槽发射形成汇聚光带刚好照射到集热管上。 3)13:49分,ADC_east值为0140H,ADC_west值为0077H,说明东边光照不足,太阳运行到聚光槽法线西边。这是太阳自然运动造成。系统判断为at_west状态,与实际情况相符。此时发现电机启动追光。 4)当人为遮光时,ADC值分别为013DH和0189H,说此时光照不足,系统判断为no_sun状态,判断结果与实际情况相符。 表2 实验测试数据 以上测试表明,使用光敏电阻及遮光法设计的追光传感模块能够正确的判断太阳位置,并正确的启动聚光系统进行有效追光,确保反射光保持汇聚到集热管上,满足槽式聚光系统的设计要求。这也验证了文中所讨论的遮光板高度计算方法的正确性,对于工程应用具有很强的理论指导意义。在制作和调试过程发现,光敏电阻的个体性能差异大,阈值ADC_th需要根据实际聚光系统进行调整,这对于规模化应用是不利的,后续可以考虑在软件上使用智能学习算法进行修正。 参考文献: [1] 钟史明. 槽式太阳能热发电介绍[J]. 区域供热, 2014(2):84-91. [2] 袁炜东. 国内外太阳能光热发电发展现状及前景[J]. 电力与能源, 2015, 36(4):487-490. [3] 王金平, 王 军, 冯炜,等. 槽式太阳能跟踪控制系统的研制及应用[J]. 农业工程学报, 2015, 31(2):45-52. [4] 王志超, 韩 东, 徐贵力,等. 一种新型太阳跟踪器的设计[J]. 传感器与微系统, 2009, 28(2):91-93. [5] 傅开新, 彭 凯, 程思源,等. 太阳能光伏-热伏发电板的自适应追光系统设计与实现[J]. 计算机测量与控制, 2017, 25(10):224-227. [6] 胖 莹, 王振臣, 冯 楠,等. 太阳能智能追光装置设计[J]. 水电能源科学, 2011, 29(8):207-210. [7] 王志超, 韩 东, 徐贵力,等. 一种新型太阳跟踪器的设计[J]. 传感器与微系统, 2009, 28(2):91-93. [8] 李永红, 刘天野. 自动追光系统设计[J]. 机械工程与自动化, 2012(3):119-121. [9] 蔺金元. 太阳能电池板自动追光控制系统设计[J]. 宁夏工程技术, 2012, 11(4):355-358. [10] 朱世佳, 侯建军. 基于S3C44B0的太阳能追光系统设计[J]. 仪器仪表用户, 2009, 16(4):41-43. [11] 崔海朋, 张超辉. 基于STM32的嵌入式槽式太阳能热发电控制器设计[J]. 鲁东大学学报(自然科学版), 2017, 33(2):122-126. [12] 黄祥源. 基于模糊PI控制太阳能追光系统[J]. 工业控制计算机, 2014(12):53-55.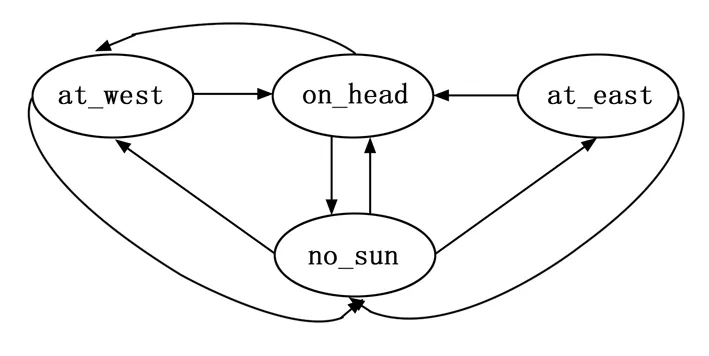
2.3 软件设计
3 实验与分析

4 结束语
