多智能体系统的鲁棒故障估计观测器的设计
2018-05-23,,
,,
(1.武汉科技大学 冶金自动化与检测技术教育部工程研究中心,武汉 430081;2.华中港航物流集团有限公司,武汉 430021)
0 引言
随着计算机技术和人工智能研究的发展,多智能体系统的研究已经成为了当今计算机领域研究的一个热点,是分布式人工智能研究的一个重要分支,其目标是将大的复杂系统建造成小的、彼此相互通讯及协调的、易于管理的系统。近些年来,多智能体系统受到了学者们广泛的关注和大量的研究,由于它在一些领域里的应用,例如机器人协作的控制[1]、无人机编队飞行的控制[2]、传感器网络[3]等。大多数情况下,学者们都会假设多智能体系统中的每个单元都是正常工作的,没有发生故障,但是实际运行过程中,由于环境变化等因素,执行器或者传感器发生故障是个大概率事件,所以考虑故障是很有必要的,因此多智能体系统中的故障检测和估计成为了学者们研究的热点问题。在文献[4]中,针对一类受到未知干扰的非线性多智能体系统,首先设计了每个智能体系统的未知输入非线性观测器,然后基于观测器的状态估计信息,设计了鲁棒一致性控制协议,考虑智能体出现故障的情况,提出了分布式故障检测算法。在文献[5]中,针对一类非线性大规模系统,提出了一种基于滑模观测器的鲁棒分散式执行器故障检测与估计方法。在文献[6]中,针对一类存在未知非线性的多智能体系统,研究具有执行器故障的“领导-跟随”协同控制问题,提出了分布式模糊容错协同控制器的设计方案。
在文献[7]中,研究了线性时不变多智能体系统混合H-/H∞故障检测滤波器设计问题,利用他们的方法,不仅可以检测出自己的故障,也可以检测到邻近智能体的故障。在文献[8]中,针对一类具有马尔可夫传递时滞的非线性网络控制系统,提出了一种基于滑模观测器的故障估计方法。以上文献都研究多智能体故障检测与估计问题,在全频域内设计了故障检测和估计观测器,这具有较强的保守性。需要指出的是,系统的外界扰动频率很多情况下都是处于有限频域内,因此,为了满足特定性能指标,在有限频域内设计更少保守性的故障估计观测器具有重要的研究意义。由于外界环境的变化,系统运行时间的延长等因素,系统的某些参数可能会在一定范围内发生变化,因此为了使所设计的观测器能更好的满足实际情况,考虑参数变化具有重要的实际意义。
基于以上分析,本文在有限频域内,针对线性变参数多智能体系统设计故障估计观测器并进行了仿真分析,验证了算法的有效性。本文结构如下,第二部分是系统的描述和问题的公式化;第三部分是故障估计观测器的设计和证明过程;第四部分是数值仿真与分析;第五部分是文章的总结。
1 系统的描述和问题的公式化
考虑具有N个节点的线性变参数多智能体系统,其中每个独立节点的动力学方程表示如下:
(1)

假设每个智能体的不确定性系统矩阵可以表示为若干个顶点矩阵的凸组合,即:
M(p(t))=[A(P(t)),Bu(p(t)),Bd(p(t)),Bf(p(t)),

通过通讯网络,每个智能体都能探测到附近智能体的信息,因此可以假设每个智能体都具有绝对可测输出vi(t)和相对可测输出wi(t),j∈Ni表示智能体j的邻接智能体为Ni,则:
拉普拉斯矩阵L∈RN×N的定义如下:
Lii=|Nri|
(2)
|Nri|表示第i个节点的度,L是半正定的非满秩矩阵,最小的特征值是0。
则第i个独立节点的动力学模型如下所示,
yi(t)=vi(t)+wi(t)=Cxi(t)+Dddi(t)+Dffi(t)+
(3)
其中:i=1,2,.....N.
通过联立公式(2)和(3),可以得到多智能体系统的动力学等式如下,
⊗A(p(t)))x(t)+(IN⊗Bu(p(t)))u(t)+
(IN⊗Bd(p(t)))d(t)+(IN⊗Bf(p(t)))f(t)y(t)=
((L+IN)⊗C)x(t)+((L+IN)⊗Dd)d(t)+
((L+IN)⊗Df)f(t)
(4)
其中:
x(t)=[x1(t),....,xN(t)]T
y(t)=[y1(t),.....,yN(t)]T
u(t)=[u1(t),....,uN(t)]T
f(t)=[f1(t),...fN(t)]T
d(t)=[d1(t),...dN(t)]T
为了方便描述算法,给出相关引理。

引理2:假设(1)中每个智能体的系统∑(A,C)都是状态完全可观测的,则(4)中系统∑(IN⊗A,(L+IN)⊗C)也是状态可观测的。
证明:由PBH判据可知,对于所有的s∈ψ,ψ为矩阵A的特征值的集合,如果所有的s都能使φ(s)为满秩,则系统∑(IN⊗A,(L+IN)⊗C)是可观测的,
(5)
由引理1可知L+IN是正定矩阵,对其进行特征值分解可以得到L+IN=VΛVT,其中V∈RN×N为特征向量,Λ=diag(λ1,...λN)∈RN×N为特征值,且都为实数,定义以下正交矩阵,
⊗In]
若Tlφ(s)Tr满秩,当且仅当对于所有的s∈ψ,φ(s)也是满秩。因为VTV=IN,则VT(L+IN)V=Λ,所以可以得到:
⊗In]=
(6)
因为∑(C,A)是可观测的,则[CT,(sI-A)T]T是满秩的,且λi,i=1,...,N为正值,所以:
所以∑(IN⊗A,(L+IN)⊗C)是状态可观测的。
多智能体系统的故障估计观测器设计问题是非常复杂的,特别是当智能体个数很大的时候,所以为了研究的方便性,需要对多智能体系统进行解耦,下面是解耦的具体过程。
定义一个状态变换x→Tx=ζ,T=VT⊗IN,则:
⊗A(p(t)))T-1=IN⊗A(p(t))


T(IN⊗Bf(p(t)))=VT⊗Bf(p(t))=
(IN⊗Bf(p(t)))(VT⊗Iq)
定义:


通过简单的计算可以将(4)中的系统动力学方程改写成状态变化后的系统动力学方程如下:



(7)
由公式(7)可以得到解耦后的系统状态方程如下,其中i=1,....N,
(8)
(9)


(10)
由公式(10)可以得到以下动力学方程,

因此可以得到:
(11)


本文提出的在有限频域内所设计的H∞故障检测观测器需要满足以下条件:

(12)

(13)

(14)
其中:

2 故障估计观测器的设计
为了推导出条件(12)-(14),引入以下引理。
引理3:广义KPY引理,对于给定的对称矩阵Π,以下两个条件是等价的,
(15)
2)存在对称矩阵P和Q∈Hn,且Q>0,则:
(16)
其中:ϖc=(ϖ1+ϖ2)/2
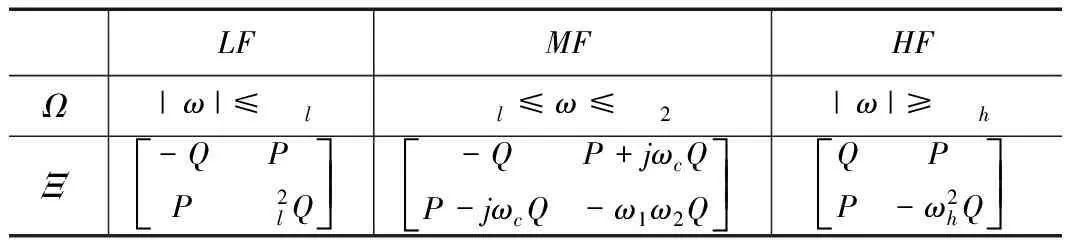
表1 不同频率范围中的Ω,Ξ
引理4(投影引理):Γ,Λ,Θ为给定的矩阵,存在矩阵G满足ΓGΛ+(ΓGΛ)T+Θ<0成立,当且仅当下面不等式成立:
Γ⊥ΘΓ⊥<0,(ΛT)⊥Θ(ΛT)⊥T<0
(17)
2σPs+ATPs+PsA<0
(18)
基于GKYP引理和投影引理,可以得到满足条件(12)-(14)的定理。

19)
(20)
(21)
稳定性证明:考虑到以下不等式(22):
(22)
通过计算,不等式(22)等价于以下不等式:
(23)

(24)
(25)

JΕJT+ZΠZT+He(ΓGΛ)=
(26)
由引理3可知,如果(26)<0成立,当且仅当(27)成立,
WT(JΞJT+ZΠZT)W<0
U(JΞJT+HΠHT)UT<0
(27)
公式(27)可以写成以下形式,
所以(26)<0成立。
使用Schur补引理,由(26)可以得到不等式(28),
(28)

(29)

(30)
则公式(20)成立,同理可证明公式(21)成立。
本部分主要设计了故障估计观测器,提出了系统稳定性条件及在有限频域内得到了鲁棒性条件并且进行了证明。
3 数值仿真
为了验证所提出的故障估计观测器算法在线性变参数系统中的有效性,本文引入微型飞行器的游荡飞行模式中的纵向飞行运动,游荡飞行模式主要受升降输入的控制[9],假设每个微型飞行器的单输入输出升降模型所对应的矩阵如下所示,
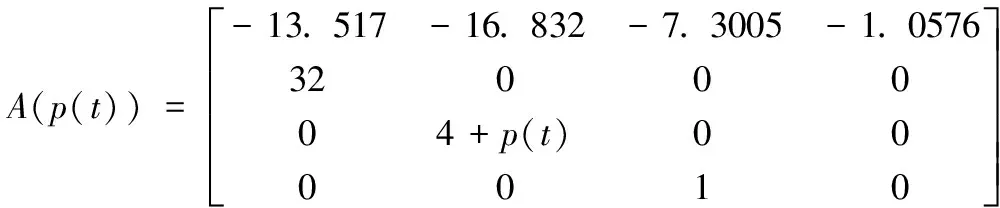

Dd=[0.18],Df=[1.26]
其中:Bf=Bu是执行器故障矩阵;Bd=Bu是外界扰动的矩阵,因为在很多工业应用中,外部扰动都是通过输入通道进入到系统中的;p(t)是随时间变化的参数,假设p(t)∈[0,0.5]。
四个微型飞行器的拉普拉斯矩阵和网络拓扑图如下所示,

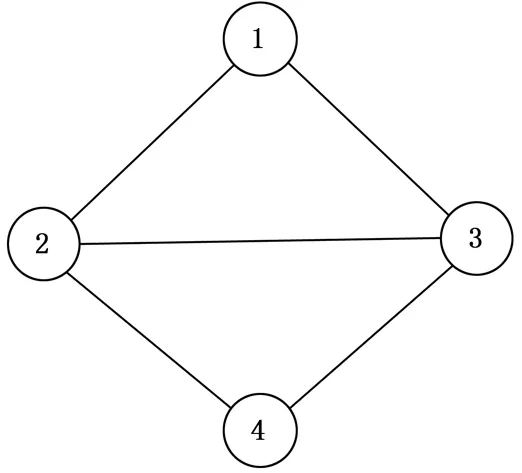
图1 网络拓扑图
设定参数σ=0,|ω|≤ϖl=0.2,根据解耦后的系统所设计的故障估计观测器及提出的算法,通过LMI优化技术,在所设定的变参p(t)的范围内,可以得到外界扰动鲁棒性能指标γ1=0.052 7,故障鲁棒性能指标(γ2)max=0.887 1,可以看出所设计的故障估计观测器对故障和外界具有良好的鲁棒性,所对应的故障估计观测器增益矩阵为:
[2.2079 -0.0509 -2.8141 -0.7320 13.1986]T
假设系统时变参数p(t)=0,当外界扰动d(t)=0.5发生在t=200 s的时候,实际故障f(t)=1时,由图2可以看出,在[0,200 s)的区间内故障估计误差为0,在200 s时候加入了扰动信号,此时故障估计误差产生比较大的波动,最后稳定在0.026 37,说明所设计的故障估计观测器能及时且比较准确的估计故障的误差值;由图3可以看出,故障的实际值和估计值的大小很相近,估计值最后稳定在0.973 6,验证了故障估计观测器的有效性。当外界扰动d(t)=0.2*sin(0.2*t),实际故障f(t)=1时,由图4可以看出,故障的估计误差近似处于区间[-0.03431,0.03457]内,且上下波动,误差值较小,验证了故障估计观测器的对故障估计的准确性;由图5可以看出,故障的估计值围绕着实际值上下波动且波动范围非常小,及实际值和估计值很相近。

图2 故障估计误差(p(t)=0)

图3 故障的实际值和估计值(p(t)=0)
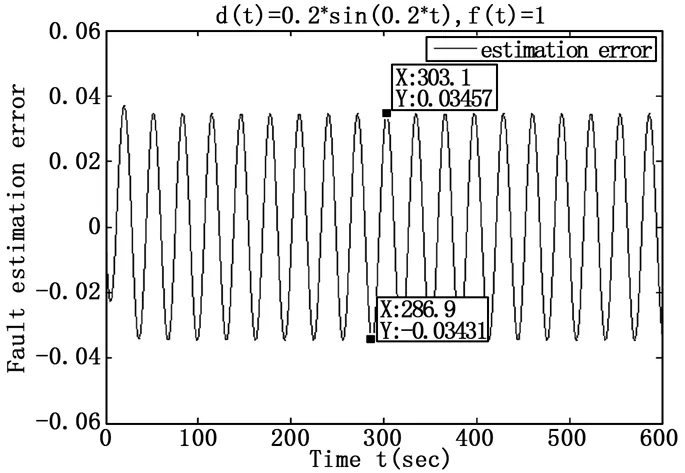
图4 故障估计误差(p(t)=0)
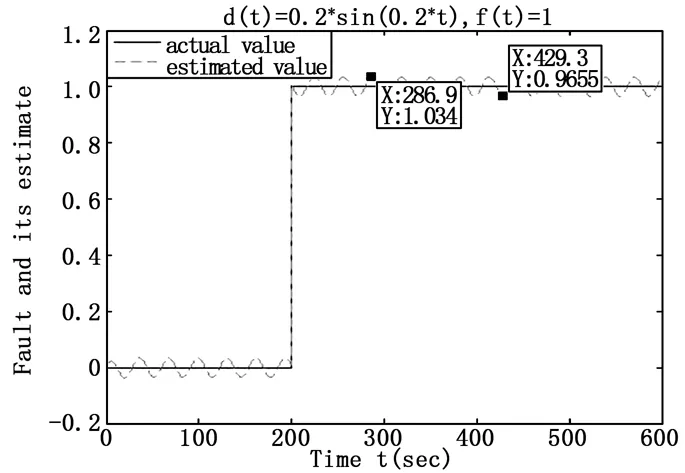
图5 实际故障和估计故障(p(t)=0)
假设系统时变参数p(t)=0.5,当实际故障f(t)=1,外界扰动d(t)=1时,所得到的故障估计误差如图6所示,故障实际值和估计值如图7所示;当实际故障f(t)=1,外界扰动d(t)=0.5*sin(0.2*t)时,所得到的的故障估计误差如图8所示,故障实际值和估计值如图9所示,同理分析,可以知道所设计故障估计观测器可以比较好的估计故障信号的大小,且估计误差很小。

图6 故障估计误差(p(t)=0.5)
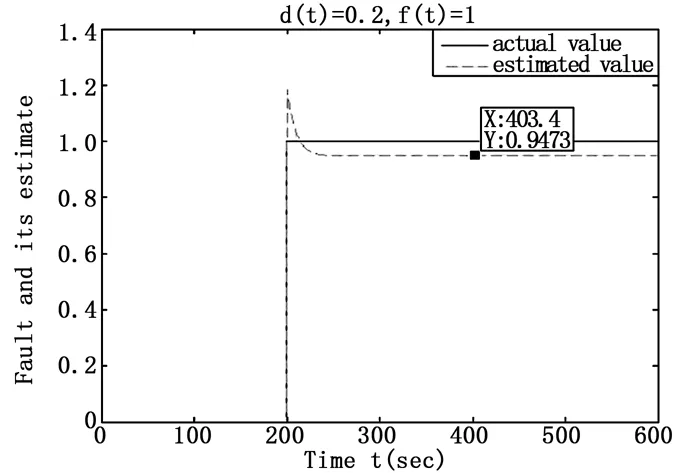
图7 实际故障和估计故障(p(t)=0.5)

图8 故障估计误差(p(t)=0.5)
同理可以得到,在时变参数p(t)的范围内,故障估计观测器具有良好的鲁棒性能指标且故障估计误差较小,验证了所提出的算法的有效性。

图9 实际故障和估计故障(p(t)=0.5)
4 总结
本文在有限频域内针对线性变参数多智能体系统设计了鲁棒H∞故障估计观测器。首先,根据每个智能体的绝对可测输出和相对可测输出建立了单个智能体的动力学方程,结合通讯拓扑图及拉普拉斯矩阵得到了多智能体系统的动力学方程,由合适的变换对多智能体系统模型进行解耦;然后由解耦后的系统动力学方程及GKYP和投影引理得到了故障估计观测器的充要条件,并且给出了证明过程,通过LMI优化技术得到了故障估计观测器增益矩阵和鲁棒性能指标;最后,仿真例子验证了所设计的故障估计观测器的有效性。
参考文献:
[1] 陈荣亚,陈小平.多智能体分层协作规划及在RoboCup中的应用[J].计算机系统应用,2016,25(1):17-23.
[2] 宗令蓓,谢 凡,秦世引.基于MAS的无人机编队飞行智能优化控制[J].航空学报,2008,29.
[3] 车 畅,梁韦华,周 悦,等.基于多智能体的无线传感器网络协同问题研究[J].仪器仪表学报,2005,26(2):229-232.
[4] 陈 刚,林 青.基于观测器的多智能体系统一致性控制与故障检测[J].控制理论与应用,2014,31(5):1326-1333.
[5] Edwards C.Robust decentralized actuator fault detection and estimation for large scale systems using a sliding mode observer[J].International Journal of Control, 2008,81(4):591-606.
[6] 王 巍,王 丹,彭周华.不确定非线性多智能体系统的分布式容错协同控制[J].控制与决策,2015(7):1303-1308.
[7] Menon P P, Edwards C.Robust Fault Estim ation Using Relative Information in Liner Multi-Agent Networks[J].IEEE Trans on Automatic Control,2014,59(2):477-482.
[8] Jiang B, Peng S, Mao Z.Sliding mode observer-based faults estimation for Nonlinear networked control systems[J]. Circuits Systems and Signal Processing, 2011,30(1):1-16.
[9] Wu H,Sun D,Zhou Z.Model identification of a micro air vehicle in loitering flight based on attitude performance evaluation[J].Robotics IEEE Transactions on, 2004,20(4):702-712.
