基于功率预测的变步长扰动观察法MPPT控制策略研究
2018-05-23,
,
(浙江工业大学 信息学院 电子信息与智能系统研究所,杭州 310023)
0 引言
当下,传统能源匮乏问题越来越受到关注,开发绿色新能源迫在眉睫,其中,太阳能是可再生能源重要的组成部分[1-2]。为了最大限度地开发太阳能,最大功率点跟踪(MPPT)技术必不可少。针对目前MPPT控制技术的研究,很多专家开发出了一些优越的控制算法,文献[3]和文献[4]中所研究的改进型扰动观察法解决了传统定步长扰动观察法存在的步长选择困难问题,很好的兼顾了动态跟踪速度和稳定精度;文献[5]采用了模糊控制结合扰动观察法的复合MPPT控制策略,有效地增强了光伏系统的跟踪速度和鲁棒性。文献[6]提出了一种自适应变步长电导增量法,此算法可以根据外界环境的变化实时调整扰动步长,解决了传统电导增量法存在的误判问题。文献[7]中提出了新型三点式扰动观察法,可实现反应迅速,稳态精度高的目的。文献[8]研究了一种基于滞环控制的改进型扰动观察法不但启动特性好、稳态震荡小,而且可以防止“误判”。文献[9]提出了一种基于外推追赶迭代法MPPT控制策略,有效克服了传统扰动观察法的缺点。另外,文献[10-12]还分别提出了粒子群算法、滑模算法和Fibonacci数列算法,智能化程度较高,均取得不错的控制效果,但在硬件中不易实现;针对上述的问题,本文提出了一种基于功率预测的变步长扰动观察法MPPT复合控制算法,此算法不但能解决误判问题,而且具备较快的跟踪速度和较高的稳态精度。
1 光伏电池数学模型及其输出特性
1.1 光伏电池的数学模型
光伏电池实质是由若干P-N结组成[13],光伏电池既不是恒流源也不是恒压源,当外界条件发生变化时,其输出的P(输出功率)、U(输出电压)和I(输出电流)均会发生相应变化,其等效电路模型如图1所示。

图1 光伏电池等效电路模型

(1)
其中:Uoc(开路电压)、Isc(短路电流)、Im(最大功率对应电流)和Um(最大功率点对应电压)。且Uoc、Isc、Im和Um这4个参数是在S=1 000 W/m2,T=25 ℃条件下给出的,此模型在Simulink平台也易实现。可将(1)式进一步简化为:
(2)
(3)
(4)
1.2 光伏电池输出特性
外界环境发生变化时,其输出特性如图2所示。由图2可以看出,光伏电池输出P-U曲线为非线性,且每条曲线存在一个特定电压对应曲线的最大值(峰值),此峰值对应特定电压为Um,当光照强度(S)逐渐变强时,输出功率也随着变大;当温度(T)逐渐升高时,输出功率逐渐减小。当外界环境变化时,光伏电池不可能时时刻刻都工作在最大功率状态,因此会造成能量损失,降低整个光伏系统的效率,为了让光伏电池实际工作点始终工作在最大功率点处,这里就需要借助于MPPT技术。这里基于Boost升压电路作为主电路,通过调节MOS开关占空比,利用MPPT算法对MPP进行周期性搜寻,来实现最大功率跟踪。

图2 光伏电池输出P-U特性曲线
2 传统扰动观察法
常见的一些MPPT控制有扰动观察法(Perturbation Observation)、电导增量法(INC)、变步长扰动或电导增量法、模糊控制、神经网络控制,这些算法各自具备相应优缺点。其中,常见的扰动观察法就是通过实时地对光伏电池输出电压施加一个正方向扰动ΔU,判断前后两个相邻时刻输出功率的变化量ΔP,如果ΔP是正的,则说明MPP位于实际工作点的左侧,需要继续保持正向扰动;反之,则反向扰动,P&O算法流程图如图3所示。
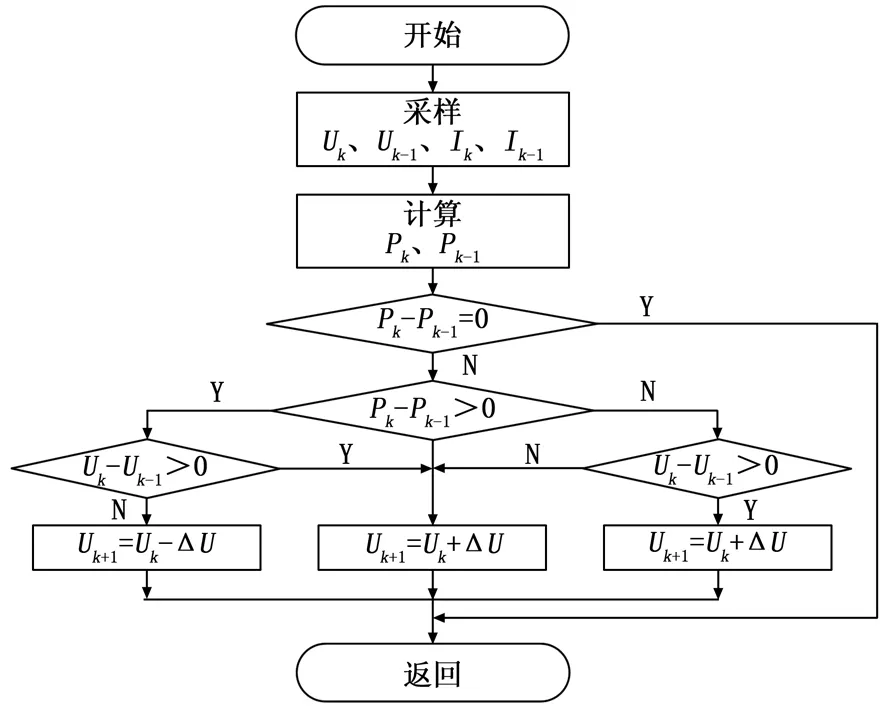
图3 传统扰动观察法控制流程图
2.1 传统扰动观察改进的办法
由以上分析可知,常规定步长扰动观察法在动态响应速度和稳态精度方面难以同时兼顾,因此为了提高定步长算法的性能,改进型变步长扰动算法应运而生。目前最常见的两种MPPT控制策略如以下两种:
1)由图2可知,光伏电池输出特性近似为一条抛物线,存在唯一最大功率点。在实际最大功率点处,|dP/dU|=0;在最大功率点两侧时,|dP/dU|为一不等于零的数。可以发现,当实际工作点距离最大功率点较远时,|dP/dU|越大,这时系统采用较大步长,便于缩短跟踪时间,加快跟踪速度;当实际工作点距离最大功率点较近时,|dP/dU|越小,此时系统采用较小步长,减弱稳态震荡现象。因此,考虑把步长表示为|dP/dU|的函数,这里写成:ΔU=α×|dP/dU|,只需通过选择合适的系数α,就可以实现变步长算法在MPPT中的应用。
2)由图2中光伏电池输出曲线:在最大功率点右侧曲线斜率绝对值约等于左侧斜率绝对值的4倍;当实际工作点位于MPP左侧时,由于曲线较平缓,需要加快小跟踪速度,故需采用大步长k1。当实际工作点位于MPP右侧时,由于曲线较陡峭,需要减小跟踪速度,故需采用小步长k2。两者关系:k1=4k2。此种改进办法在MPPT中取的了不错效果。
在前人研究基础上,本文研究了一种基于功率预测结合变步长扰动观察法MPPT复合控制策略。
2.2 误判问题分析
由图3可以看出,传统扰动观察算法存在步长ΔU选择困难的问题。若步长选择过大,跟踪速度会变快,但是待功率曲线稳定后,会存在稳态震荡,使实际工作点在MPP附近来回波动,这样会导致光伏系统效率降低;若步长ΔU选择过小,虽然提高了跟踪精度,可以减小稳态震荡,但是存在跟踪速度缓慢问题,跟踪速度缓慢同样会降低系统效率。所以,定步长扰动观察法难以同时兼顾跟踪速度和稳态精度问题。另外,“误判”问题也是当前定步长P&O算法的不足。例如,当外界光照强度不断变化时(夏季的多云天气),P-U特性曲线会不断变化,当光照强度突变时,就可能导致“误判”问题。其中,误判分析如图4所示。
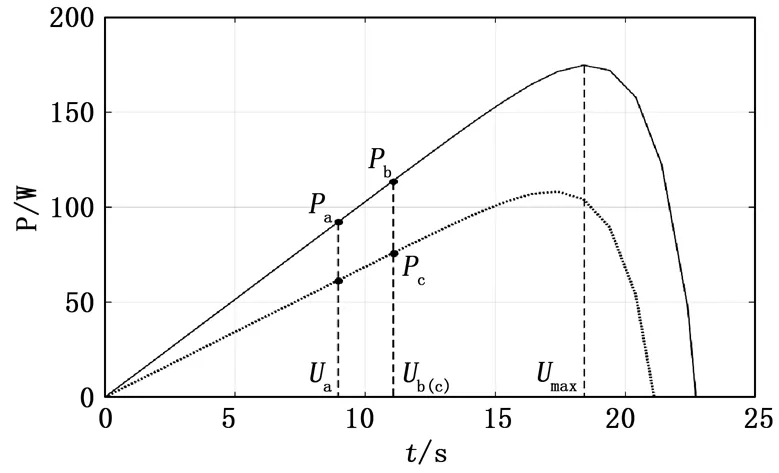
图4 误判分析示意图
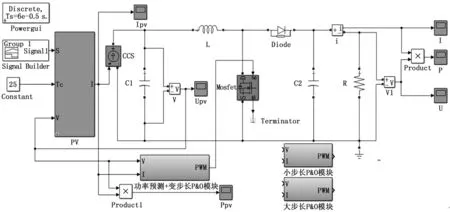
由图4可以看出,假设光伏系统实际工作点在MPP左侧时,此时工作电压为Ua,对应功率为Pa。当电压经过施加扰动移动到Ub时,对应功率为Pb,如果外界环境条件不变化,光伏电池的输出功率Pb>Pa,即ΔP>0,扰动方向正确;但是实际中会存在光照强度变化的问题,例如,如果外界光照强度减弱,则Ub对应的功率为Pc,此时Pc 为了改善上述传统算法的缺陷,本文研究了一种基于功率预测结合变步长扰动观察法MPPT复合控制策略,该种算法不但能解决跟踪速度与稳态精度之间的矛盾,最大限度的保证光伏电池时时刻刻都工作在MPP处,而且还能克服传统算法存在的“误判”问题,从而减小“误判”所带来的能量的损失,提高光伏系统的效率。 由第2节分析可知,定步长扰动观察法存在两个缺陷:一个是动态速度与稳态精度之间的矛盾,另一个是“误判”问题。首先考虑动态速度与稳态精度之间的矛盾,这就需要变步长扰动观察法,其原理为:在离MPP较远时,采用大步长可以提高跟踪速度,当实际工作点离MPP较近时,采用小步长来对MPP进行精确定位,避免了稳态震荡,变步长扰动观察法可有效解决跟踪速度和稳态精度之间的矛盾。由图2的光伏输出P-U特性曲线可以看出,在实际工作点远离MPP时,|ΔP/ΔU|较大,当实际工作点越来越靠近MPP时,|ΔP/ΔU|越来越小,在MPP处,|ΔP/ΔU|=0。因此,根据这一规律,设变步长扰动观察法的步长ΔU=β|ΔP/ΔU|,这里,令变步长系数β=0.002。 另一方面,为了解决误判问题,需要引入功率预测,其工作原理图如图5所示。设采样频率足够高,且光照强度满足在一个采样周期内均匀变化,图5中,光伏电池在kT时刻的输出电压为U(k),对应功率为P(k),此时不进行扰动,经过半个采样周期(k+0.5)T时刻测得功率为P(k+0.5),则可得到一个采样周期的预测功率P*(k): P*(k)=2P(k+0.5)-P(k) (5) 在(k+0.5)T时刻增加一次扰动步长,则可得到(k+1)T时刻的电压U(k+1),对应功率为P(k+1)。这个过程中,kT时刻对应的预测功率P*(k)和(k+1)T时刻对应的P(k+1)可以看出同一光照强度下,P-U曲线扰动前后的两个功率,因此通过比较P*(k)和P(k+1)便可以避免“误判”问题。 图5 功率预测原理示意图 根据以上理论分析,基于功率预测结合变步长扰动观察法MPPT控制策略流程图如图6所示。 图6 基于功率预测结合变步长扰动观察法MPPT控制策略流程图 其中,Um-new为PV电池理论值,Uref为每次扰动后所得电压值,两者的差值通过PI控制器后得到的输出量,作用于PWM模块;因此,当外界环境发生变化时,光伏电池运行的实际电压可以跟随环境改变后的理论MPP对应电压。 在Matlab R2014b/Simulink平台上搭建光伏系统MPPT控制仿真模型,基于Simulink的MPPT总体仿真模型示意图如图7所示。其中Boost电路主要参数设置如下:C1=150 μF,C2=350 μF,L=8 mH,R=10 Ω。PV电池参数:开路电压Uoc=25.11 V,短路电流Isc=12.02 A,MPP对应最大功率电压Um=19.31 V,MPP对应最大功率电流Im=9.05 A。S=1 000 W/m2,T=25 ℃时,PV电池的输出功率P=174.76 W;S=400 W/m2,T=25 ℃时,输出功率P=77.8 W;S=800 W/m2,T=25 ℃时,输出功率P=139.6 W;仿真时间设置t=1.5 s。图7中分别包含了大步长扰动观察法模块、小步长扰动观察法模块和基于功率预测结合变步长扰动观察法实现模块,对3种控制条件下的输出波形进行对比来验证功率预测结合变步长扰动观察法MPPT复合控制策略的优越性。其中,基于功率预测结合变步长扰动观察法控制模块Simulink实现如图8所示。 图7 基于Simulink的MPPT总体仿真模型 图8 基于预测功率的变步长扰动观察法模块Simulink实现模型 运用Signal Builder模块来模拟外界光照强度变化,光照强度S变化情况:在0~0.5 s时间段,光照强度S=1 000 W/m2;在0.5 s时刻,光照强度S从1 000 W/m2突变为400 W/m2;在1.5 s,时刻,光照强度S从400 W/m2突变为800 W/m2。在此种光照变化条件下,得到大步长(ΔU=0.03)扰动观察法、小步长(ΔU=0.001)扰动观察法和预测功率结合变步长扰动观察法复合算法(变步长系数β=0.002)条件下的输出功率波形如图9所示。 图9 3种控制条件下的输出功率仿真波形 从图9中可以看出,当采用大步长扰动观察法时,开始(启动)阶段速度快,在t=1 s时刻,光强照度由400 W/m2突变到800 W/m2,输出功率达到新的稳态仅用0.051 s,显然在外界光强照度变化时,响应速度较快,但从图9(a)中1.2~1.4 s的局部放大图可以看出,稳定后输出功率波形在131.2~138.3 W之间来回震荡,稳态震荡幅度较大,造成这种现象的原因是当实际工作在到达MPP附近时,会出现工作点跨过MPP的情况,改变扰动方向后,工作点的电压和MPP对应电压还是小于步长,导致大幅度震荡且无法稳定在MPP处。由图9(b)可以看出,在t=1 s时刻,光强照度由400 W/m2突变到800 W/m2,输出功率达到新的稳态仅用0.148 s,跟踪速度远慢于大步长扰动观察法,从图9(b)中1.2~1.4 s的局部放大图可以看出,此时实际工作点在MPP附近以小幅度来回波动,波动范围为135.2~138.5W,震荡幅度较大步长控制明显减小;当采用预测功率结合变步长扰动观察法时,如图9(c)所示,在启动阶段,跟踪速度快,在t=1 s时刻,光照强度此时由400 W/m2突变为800 W/m2,输出功率达到新的稳态仅用0.057 s,动态响应速度与大步长扰动观察法不相上下,从图9(c)中1.2~1.4 s的局部放大图可以看出,稳定后输出功率在137.1~139.4 W范围波动,范围波动范围小,跟踪精度高。 因此,采用本文提出的基于预测功率的变步长扰动观察法MPPT复合控制策略时,无论从跟踪速度和稳态精度方面,基本能够同时兼顾,满足系统设计要求。 针对定扰动观察法的不足,本文提出的基于预测功率的变步长扰动观察法MPPT复合控制策略,不但有效地解决了跟踪速度和稳态精度之间的矛盾,而且可以避免误判问题,最大限度地使光伏电池时时刻刻以最高功率输出,提高了光伏系统的效率,通过Simulink仿真结果验证了所提出复合控制算法的优越性,具有良好的工程推广价值。 参考文献: [1]Elobaid L M,Abdelsalam A K,Zakzouk E E.Artificial neural network-based photovoltaic maximum power point tracking techniques: a survey[J].Renewable Power Generation Iet,2015,9(8):1043-1063. [2]康家玉,王 旭,王素娥,等.一种基于H6桥单相光伏并网逆变器控制策略的研究[J].可再生能源,2016,34(8):1144-1150. [3]于子捷,魏晨曦,田芳芳,等.一种改进型扰动观察法在最大功率点跟踪中的应用[J].电测与仪表,2017,54(15):113-119. [4]王要强,张美玲,齐 歌.光伏发电系统改进型扰动观察最大功率跟踪研究[J].电力电容器与无功补偿,2016,37(4):111-116. [5]薛 阳,汪 莎.基于扰动观察法的模糊控制应用于光伏发电最大功率跟踪[J].太阳能学报,2014,35(9):1622-1626. [6]王军成,杨旭红,王严龙.改进自适应变步长光伏系统最大功率跟踪[J].现代电力,2014,31(5):70-73. [7]何人望,邱万英,吴 迅,等.基于PSIM的新型扰动观察法的MPPT仿真研究[J].电力系统保护与控制,2012,40(7):56-59. [8]荣德生,刘 凤. 改进型扰动观察法在光伏MPPT中的研究[J].电力系统及其自动化学报,2017,29(3):104-109. [9]杨 奕,王建山,杨元培,等.基于外推追赶迭代法的MPPT算法仿真[J].高电压技术,2017,43(7):2355-2361. [10]马 昊,张庆超,MAHao,等.基于粒子群优化算法和变步长扰动观察法的局部阴影情况下MPPT控制[J].电源学报,2016,14(3):94-101. [11]黄 勤,石国飞,凌 睿,等.基于滑模控制的光伏系统MPPT控制方案[J].计算机工程,2012,38(6):253-255. [12]许慧一.基于Fibonacci变步长搜索的光伏发电最大功率跟踪算法[J].广东电力,2015(12):25-29. [13]刘 翼,荆 龙,童亦斌.基于Simulink的光伏电池组件建模和MPPT仿真研究[J].科技导报,2010,28(18):94-97. [14]江 渝,姜 琦,黄 敏,等.单相单级光伏LCL并网逆变系统控制策略[J].电网技术,2015,39(2):312-319.3 基于功率预测结合变步长扰动观察法MPPT控制策略


4 Simulink仿真分析


5 总结
