分数阶二次非线性Sprott混沌系统的滑模同步控制
2018-05-21毛北行程春蕊
毛北行,程春蕊
(郑州航空工业管理学院理学院,河南郑州450015)
1 引言
控制系统的混沌同步问题近年来备受关注[1],随着分数阶微积分的发展越来越多的学者开始研究关于分数阶混沌系统的控制与同步问题[2−3],文献[4]研究了一类不确定分数阶混沌系统的自适应滑模混沌同步问题,能够使驱动系统与响应系统达到同步;文献[5]基于主动滑模控制方法实现了分数阶混沌系统的同步控制;文献[6]分别采用线性反馈和主动控制法研究了两个不同Sprott混沌系统的控制与同步问题;文献[7]研究了一类简单二次非线性Sprott混沌系统的分析与控制,得到了平衡点的稳定性与Hopf分岔;文献[8]研究了一类不确定混沌系统的自适应滑模终端控制问题.本文研究了分数阶二次非线性Sprott混沌系统的滑模同步控制及滑模终端控制问题,得到了分数阶Sprott系统取得滑模混沌同步的充分条件.
定义1[9]Caputo分数阶导数定义为

2 分数阶滑模同步控制问题
二次非线性Sprott混沌系统[8]

其中x1,x2,x3∈R3为系统的状态变量,当b=2,c=1时出现混沌吸引子,设计对应的分数阶系统为主系统

当α=0.95,b=2.1,c=1.2时系统呈现混沌态,对应的从系统设计为

定义系统误差

上述两式相减得到误差系统为

定理1选取滑模面控制器

则分数阶系统(2.2),(2.3)是滑模混沌同步的.
证当状态轨迹位于滑模面上时,s(t)=0,(t)=0.
由由得到从而根据分数阶微积分理论得e1(t)→0.同理,由所以得e2(t)→0.又由滑模面上s(t)=0,所以ηsgn(s(t))=0,又由于


由于积分可以得到

所以s(t)是可积的且有界,根据引理1(Barbalat引理)可知s(t)→0⇒ei(t)→0.
由以上分析可知,误差系统将收敛于零.
3 分数阶滑模终端控制问题
以系统(2.2)为驱动系统,如下系统为响应系统

假设1设不确定项△fi(y)和外部扰动di(t)有界,即存在mi,ni>0使得

假设2mi,ni(i=1,2,3)未知.
定义系统误差e1=y1−x1,e2=y2−x2,e3=y3−x3,很容易得到误差方程

引理2[11]假设存在连续正定函数V(t)满足微分不等式

式中p>0,0<η<1是两个正常数,则对于任意给定的t0,V(t)满足如下不等式


引理3[12]设有实数a1,a2,···,an,0<q<2,则有下列不等式成立

针对误差系统(3.2)设计非奇异终端滑模面

定理2误差系统(3.2)在非奇异滑模面(3.3)上,系统的轨迹在有限时间ts内到达平衡点,其中

证误差系统满足滑模面方程于是有

由引理3得

又由引理2易得误差轨迹会在有限时间ts内达到平衡点且

定理3在控制器(3.5)和自适应律(3.6)的作用下,误差系统(3.2)的状态轨迹能达到滑模面.

控制器选取趋近律控制,ki>0为增益系数,表示趋近速度,式中分别为mi,ni的估计值,设计如下自适应律


由于si·sgn(si)=|si|,再根据假设条件1,2,很容易得到

由
其中 k=min{λ1,λ2,λ3}.不难得到

所以si(t)是可积的且有界,根据引理1(Barbalat引理)可知s(t)→0⇒ei(t)→0.
4 数值仿真
为了说明方法的正确性,利用四阶龙格-库塔法对系统进行仿真研究.
定理1中,系统参数选取α=0.95,b=2.1,c=1.2,选取滑模面控制器

驱动系统与响应系统的初始值分别设置为

其系统的误差曲线如图1所示.图2,3分别对不加和加上控制器两种情况进行仿真,误差系统(2.3)中的不确定项分别为

外部扰动取d1(t)=0.2cost,d2(t)=0.6sint,d3(t)=cos3t,驱动系统与响应系统的初始值分别设置为(x1,x2,x3)=(7.3,6.4,9.2),(y1,y2,y3)=(8.5,5.7,3.6)无控制器和有控制器系统状态的两个仿真结果分别如图2,3所示,如果滑模面参数取λ1=3,λ2=4,λ3=7,r=0.6,控制器中的参数选取为(0.8,0.6,0.3),此时的系统误差曲线和仿真结果如图4所示,图4看出系统的误差很快趋近于零.
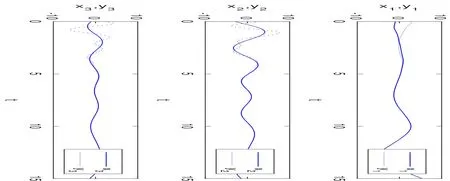
图1:定理1中的系统误差曲线

图2:无控制的主从系统状态
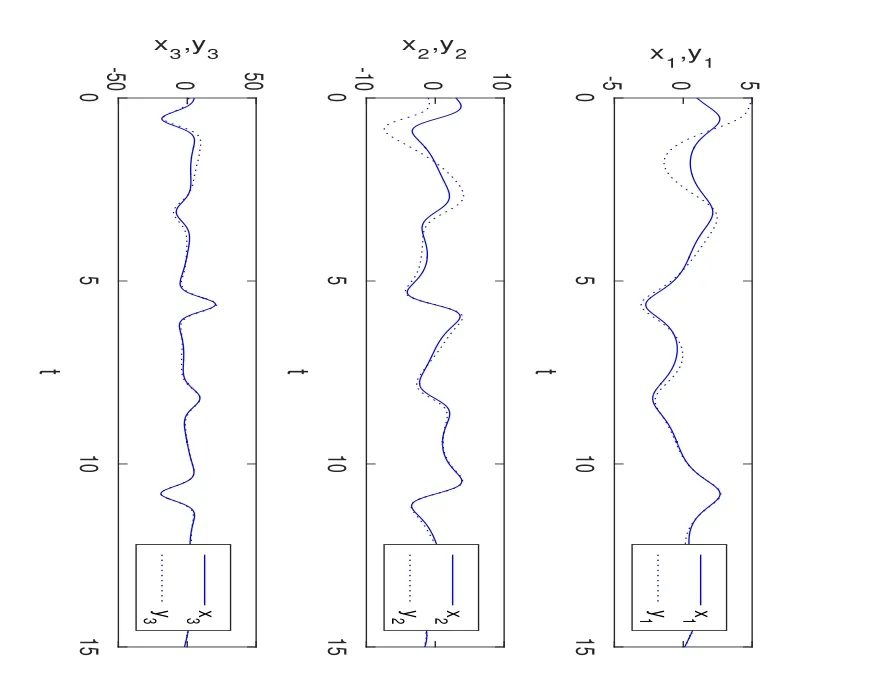
图3:有控制的主从系统状态
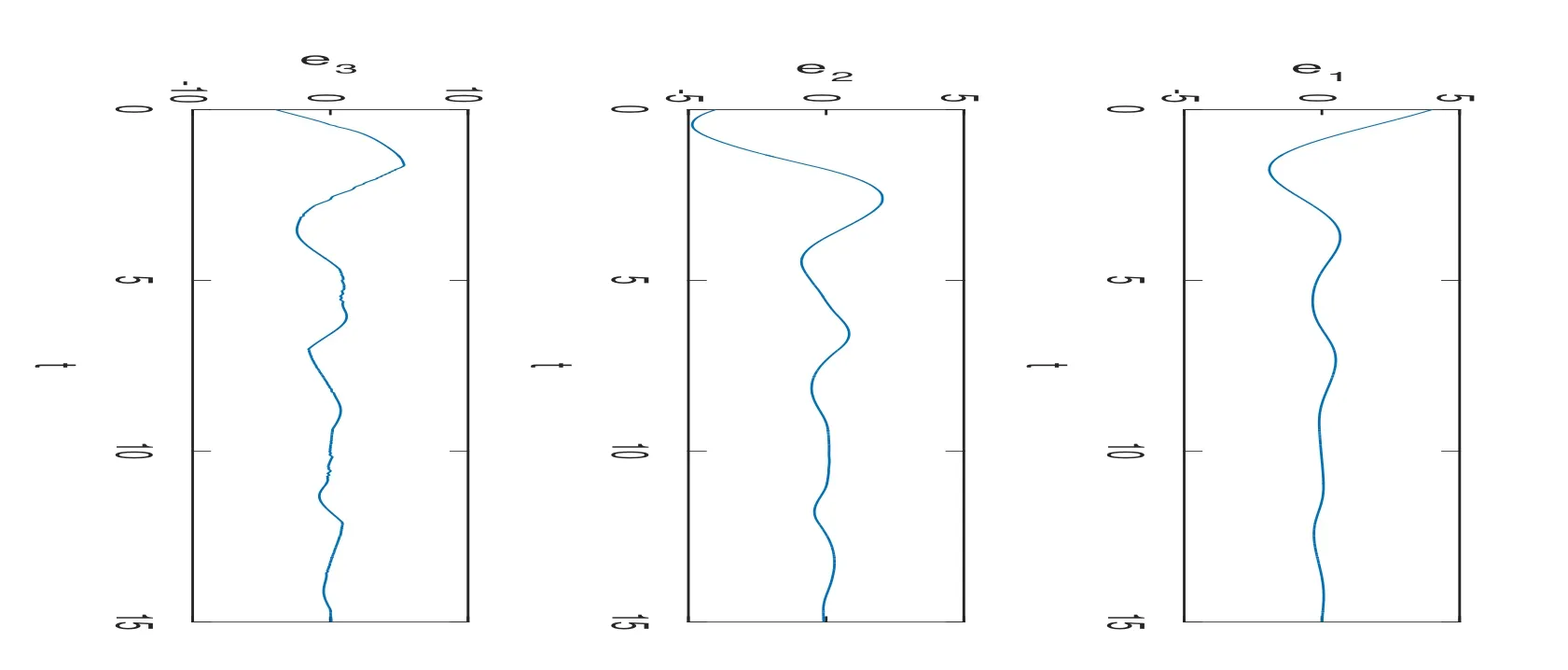
图4:定理3中系统误差曲线
5 结论
基于稳定性理论研究了分数阶二次非线性Sprott系统的滑模混沌同步控制及滑模终端同步控制问题,并给出了严格的证明,数值仿真表明了方法的有效性,文中分数阶滑模面的设计可以用来解决一类分数阶混沌系统的滑模终端同步控制问题.
参考文献
[1]李德奎,连玉平.单时滞类Lorenz系统的Hopf分岔分析[J].数学杂志,2015,35(3):635–642.
[2]Mohammad P A.Robust finite-time stabilization of fractional-order chaotic susyems based on fractional Lyapunov stability theory[J].J.Comp.Nonl.Dyn.,2012,7:1011–1015.
[3]孙宁,张化光,王智良.不确定分数阶混沌系统的滑模投影同步[J].浙江大学学报(工学版),2010,44(7):1288–1291.
[4]余明哲,张友安.一类不确定分数阶混沌系统的滑模自适应同步[J].北京航空航天大学学报,2014,40(9):1276–1280.
[5]仲启龙,邵永辉,郑永爱.分数阶混沌系统的主动滑模同步[J].动力学与控制学报,2015,13(1):18–22.
[6]徐登国.两个不同Sprott混沌系统的控制与同步研究[J].动力学与控制学报,2007,5(4):330–333.
[7]Grigoras V,Grigoras C.A novel chaotic systems for random pulse generation[J].Adv.Elec.Comp.Engin.,2014,14(2):109–112.
[8]付景超,孙敬,李鹏松.一类简单二次非线性Sprott混沌系统的分析与控制[J].吉林大学学报(理学版),2015,53(3):395–400.
[9]Podlubny.Fractional differential equation[M].New York:Academic Press,1999.
[10]梅生伟,申铁龙,刘志康.现代鲁棒控制理论与应用[M].北京:清华大学出版社,2003.
[11]Bhat S P,Bernstein D S.Geometric homogeneity with applications to finite-time stability[J].Math.Control Sign.Sys.,2005,17(2):101–127.
[12]Mohammad P A,Sohrab K.Finite-time synchronization of two different chaotic systems with unknown parameters via sliding mode technique[J].Appl.Math.Model.,2011,35(6):3080–3091.
