电动汽车混合动力系统控制研究综述
2018-05-21
混合动力汽车(Hybrid Vehicle)指的是车辆驱动系统由两个或多个能同时运转的单个驱动系统联合组成的车辆,车辆当前的行驶功率依据实际的车辆行驶状态决定,即由单个驱动系统单独或多个系统共同提供。对于混合动力系统的控制研究主要集中在系统稳定性、模式切换问题和效率方面。以下介绍了相关的几项研究成果。
1 电动汽车混合储能系统和IPM电机驱动器的集成控制方法[1]
1.1 主要目的及原理
本文提出了一种用于配备有混合动力储能系统(HESS)和IPM驱动器的电动汽车直流母线电压控制方法。HESS由高能量密度电池组和高功率密度超级电容器组成。内部永磁(IPM)电机的电机驱动通常是基于固定的直流母线电压设计的。但是,可以通过HESS的电压可控性,选择最佳的直流母线电压来提高系统效率。与传统设计方法不同,所提出的HESS仅通过接口DC/DC转换器处理车辆功率的一部分,减少了转换器的损耗,充分利用了存储设备中储存的能量,并提供了直流母线电压的升压能力。因此,电机驱动可以以最大转矩控制运行,适用于更长的工作范围。
在本文中,电机驱动控制器与HESS集成在一起(文中Fig.10),用于追踪最佳直流母线电压,同时降低系统成本并降低处理功率。电机模型用于产生最佳的直流母线电压,通过降低开关损耗来最大化系统效率。HESS能够追踪最佳的直流母线电压,因为它的升压特性可以通过将DC/DC转换器输出与UC串联连接来实现。该特性允许电动机在MTPA区域运行更长的时间间隔。
1.2 主要结论
配备有HESS和IPM驱动器的电动车辆在不同的驾驶条件下模拟。所提供的原型系统的实验结果来验证系统的有效性。通过城市道路循环(UDDS)工况仿真实验验证了该控制方法在整个驾驶周期中具有可靠的效果。
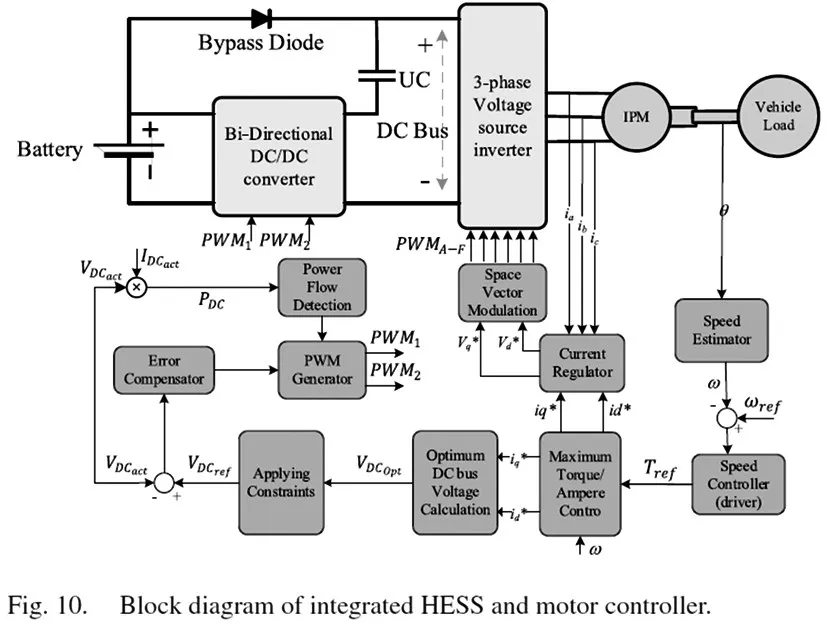
Fig.10 Block diagram of integrated HESSand motor controller.
2 混合动力电动汽车LPV转矩脉动控制[2]
2.1 主要目的及原理
本文主要研究由发动机向传动系统传递时的减振控制(文中Fig.3)。在混合动力电动汽车中本文推荐使用永磁同步电机作为驱动系统,以确保车辆在推进过程中,同时也减轻由发动机产生的转矩脉动。大多数基于这种推进方法的减振策略都需要非常精确的位置传感器。然而,本文所提出的方法并不要求使用传感器,而是建议使用位置或速度观测器。该方法与线性参数变化控制相结合,以确保速度瞬变过程中的性能稳定。此外,该方法不会使混合动力驱动器使用额外的硬件,并且消耗非常少的额外电能(不包括电机和逆变器中的电气损耗)。所提出的LPV输出调节方法可以缓解大范围速度变化中的扭矩干扰。
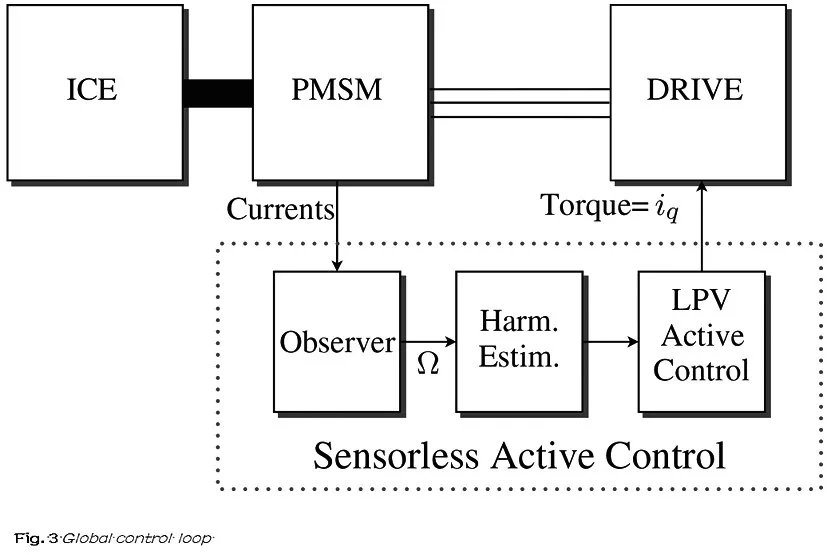
Fig.3 Global control loop
2.2 主要结论及未来发展
通过在城市旅行情景中进行仿真,以验证所提出方法的有效性。仿真结果表明,该方法的优点是它不需要产生扰动的非线性系统模型(这里指的是柴油发动机)。因此,在这种情况下,系统被认为是一个非平稳的多正弦微扰发生器。使得该方法可以很容易地扩展到所有产生正弦或脉冲信号的系统中应用,例如柴油发电机或风力涡轮机。对于未来的研究工作,LPV控制应该通过综合优化不同参数域(在这种情况下是速度)上来改进该方法,并使用未知输入的观测器来估计多正弦干扰。
3 基于V2G技术的混合动力系统极点模糊控制策略[3]
3.1 主要目的及原理
本文提出了一种用于新能源汽车的混合动力系统极点模糊(PF)控制策略。该控制策略弥补了可再生能源不确定性导致的系统频率稳定性和需求供应连续性问题。其中混合动力系统(文中Fig.1)由风力发电机(WTG)、太阳能光伏发电(PV)、太阳能热发电机(STPG)、柴油发电机组(DEG)、水电解槽(AE)、超级电容器UC)、燃料电池(FC)和飞轮(FW)组成。由于电池储能系统(BESS)成本较高,本文采用V2G技术将电动汽车(EV)的电池等效于大规模能量存储单元来代替小电池来提高系统的频率稳定性。此外,本文使用最小阶观测器来估计供应误差,根据估计的电源误差和频率偏差计算区域控制误差(ACE)信号。基于PF技术设计了两个控制器,每个控制器的任务都是抑制ACE信号的一个频率分量。ACE信号的高频成分使用诸如UC和FW等短时间常数量来进行衰减;ACE的低频分量则由具有长时间常数的DEG、FC和EV进行最小化。
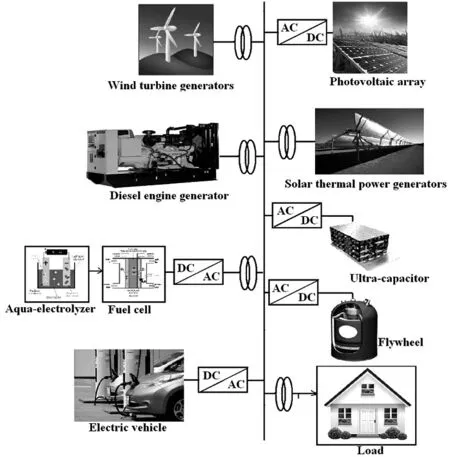
Figure1.Singlelinediagram of thehybrid power system.
3.2 主要结论及未来发展
本文还将所提出的控制策略与传统的模糊逻辑控制(FLC)相比较,通过在各种情况下的数值模拟分析来验证所提出的控制策略的有效性和鲁棒性,如下:
(1)该控制方案可以根据风速、负荷需求和太阳辐射的变化,瞬时管理PDEG、PFC、PUC、PFW和 PEV的功率流,以减少供电误差和系统频率振荡。
(2)克服了传统FLC需要大量控制规则的主要缺点,显着减少了计算时间和内存要求。
(3)能够承受风速、负荷需求、太阳辐射、系统参数变化以及故障条件等实际数据突然增减的严重情况,验证了其对各种运行条件的稳健性和有效性。
(4)减少混合动力系统所有部件(DEG、FC、UC、FW、EV)的波动。因此,如果使用这种控制策略,则只需要对系统进行小规模地调整,不仅提高了系统总体效率也降低了总成本。
总体而言,实施该控制策略后,混合动力系统的响应得到了极大的改善。未来的工作将改善本研究以进一步探索系统的响应,包括各部分详细的非线性模型等。
4 插电式混合动力电动汽车的驱动模式优化和路径规划[4]
4.1 主要目的及原理
驾驶模式指的是驾驶员可选择的动力传动系和某些车辆参数的预设配置。插入式混合动力电动汽车通常具有可以影响混合能源管理系统的特殊驱动模式选项,例如:电动车辆模式(即充分利用电池)和充电维持模式(利用内燃机在推进车辆时对电池充电)。本文提出一种优化算法,使驾驶员能够选择合适的驱动模式以提高燃油消耗率。该算法根据行程信息对驾驶模式的决策进行优化,并与考虑到加油站和充电站的路径规划相结合以找到最佳路径。
4.2 主要结论及未来发展
本文通过雪佛兰Volt的经验数据来评估所提出优化算法的可靠性。评估结果表明,该算法能够有效地减小燃油量。
未来的研究工作将在以下几个方面改善所提出的优化算法。
•该算法应该能够通知驾驶员切换驾驶模式。且只有在车辆停止或以安全速度行驶时才允许进行驾驶模式的切换。此外,优化驾驶模式切换的时间间隔,以减少驾驶模式决策的频率(文中Fig.1)。
•一般ECO模式与车辆性能相冲突。未来可以通过该算法优化驾驶模式,使得车辆不仅可以保持理想的性能,还可以实现ECO模式。
•本文所提出的算法都是在假设天气温和且交通状况良好的情况下实施。因此,未来可以结合额外的参数来增加天气在车辆模型中的影响。
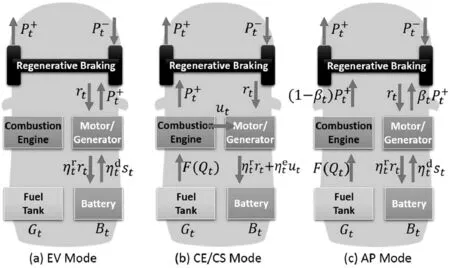
Fig.1.System modelsof four generic drivemodes.
参考文献
[1]BADAWY M O,HUSAIN T,SOZER Y,et al.Integrated Control of an IPM Motor Drive and a Novel Hybrid Energy Storage System for Electric Vehicles[J].IEEE Transactions on Industry Applications,2017,53(6):5810-5819.
[2] CAUET S,ETIEN E,RAMBAULT L.Mechanical sensorless LPV torque ripple control of hybrid electric vehicle[J].IETControl Theory&Applications,2017,11(16):2761-2771.
[3] LOTFY M,SENJYU T,FARAHAT M,et al.A Polar Fuzzy Control Scheme for Hybrid Power System Using Vehicle-To-Grid Technique[J].Energies,2017,10(8):1083.
[4] CHAU C,ELBASSIONI K,TSENG C.Drive Mode Optimization and Path Planning for Plug-In Hybrid Electric Vehicles[J]. IEEE Transactions on Intelligent Transportation Systems,2017,18(12):3421-3432.