月球天梯系统模型建立和太空舱运动的能耗计算★
2018-05-18宋海蓝蒋婷婷陈佳豪田忠健
宋海蓝, 蒋婷婷, 周 莉, 陈佳豪, 田忠健
(重庆大学机械工程学院, 重庆 400044)
引言
1895年,俄罗斯科学家首次提出太空电梯的概念:使用一根绳子连接地球和航天器,人们乘坐太空电梯沿绳子上下穿梭。在引力和向心加速度的相互作用下,绳子被绷紧,太空梯将利用太阳能或激光能沿绳子上下运动[1]。1991年人类便发明了可以使太空梯这一梦想成为可能的缆绳材料——碳纳米管。碳纳米管材料的密度只有钢铁材料的1/6到1/7,其拉伸强度却是同单位质量上钢铁材料抗拉强度的200~300倍。碳纳米管长径比可达1 000∶1以上,是一种即使做成长达几十万公里的绳子都不会被自身重量拉断的神奇材料。2003年,美国企业家迈克尔·莱恩成立了LiftPort公司,该公司投入巨资研究的地球天梯计划受到了美国宇航局的高度重视。2007年,因该计划中缆绳的制造成本过高而导致该公司陷入财政危机。2010年8月12日,在美国华盛顿召开的“国际天梯大会”上,迈克尔·莱恩表示由于月球引力仅是地球引力的1/6,如果把天梯工作重心转向月球天梯,缆绳强度的要求可以得到大大的降低,可实现性强。近年来,各国对进行月球探索的研究工作开展得如火如荼,月球天梯的建造自然吸引了各国的关注,我国清华大学的魏飞教授就致力于天梯材料碳纳米管的研究,其团队成功制备出长达半米以上的碳纳米管更是打破了当时的世界纪录[2]。但是目前中国国内对于月球天梯研究的公开文献少之又少,对于太空舱的运动方式和天梯的供能形式更是一笔带过。
1 月球天梯系统模型的建立
目前地球天梯的设想模型为:将特殊材料制作的缆绳一端固定在地球表面上,另一端连接地球同步轨道上的太空站,在万有引力和系统绕地球转动产生的离心加速度的作用下缆绳因张力而绷紧,太空电梯可利用太阳能沿缆绳穿梭于气球与太空之间[3-4]。根据同步轨道和受力平衡两个关键点,将月球天梯系统中的太空站建在地月连线上的引力平衡点(即地月之间地球对太空站的引力等于月球对太空站引力点),太空站一端和月球赤道上的基站连接,一端和靠近地球的平衡锤连接,通过平衡锤在引力和向心加速度的作用下使缆绳绷紧,从而达到太空站和平衡锤绕月球同步运转的目的。通过以上分析建立的无太空舱运行时的月球天梯系统模型图如1所示。
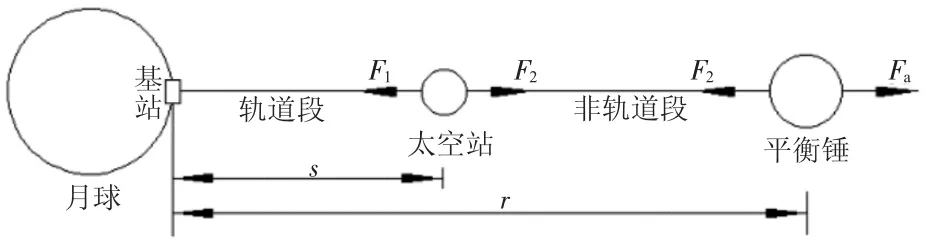
图1 月球天梯系统模型图(无太空舱时)
在该模型中,对平衡锤进行受力分析,则

对太空站进行受力分析,则

式中:F1为轨道段缆绳的拉,F2为非轨道段缆绳的拉力,Fa为平衡锤所受万有引力合力;mp为平衡锤的质量,mz为太空站的质量;r月为月球半径,T为月球自转周期,s为太空站距基站的距离,r为平衡锤距基站的距离。
当太空舱在轨道上运行时,当其处于上升加速度阶段和下降减速阶段时对它进行受力分析,可知太空舱所受的合力向上(取力的方向为沿轨道段指向太空舱为向上)。根据牛顿第三定律可知此时轨道段会受到一个太空舱对它产生向下的拉力。为了避免太空舱运行过程中产生的对轨道向下的拉力改变太空站的位置甚至将太空站拉下来,故在太空站连接基站这一端对轨道段缆绳设有动力装置,其目的是抗衡太空舱运行过程中对轨道产生的向下拉力,保证月球天梯系统的稳定性。此动力装置可采用电机加带传动结构,绘制出的原理图如图2所示。
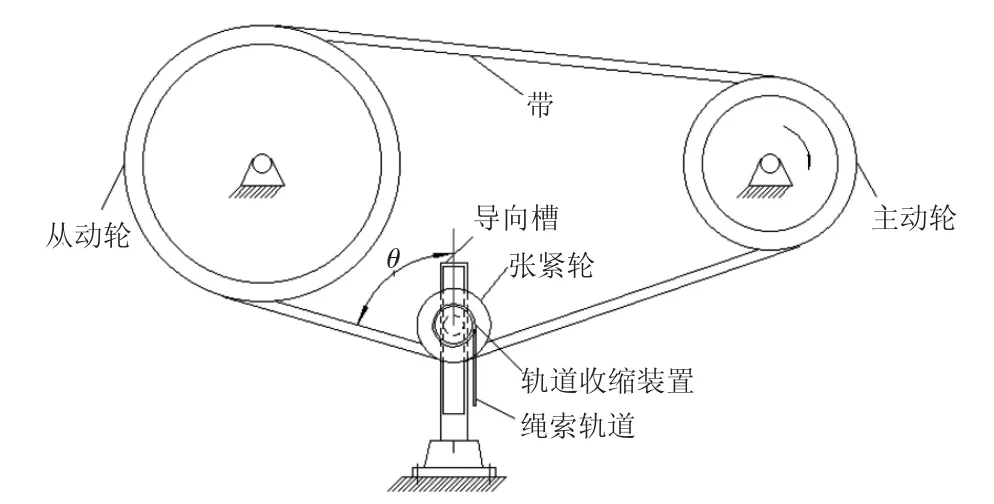
图2 动力装置原理图
图2中主动轮轴由电机带动,带传动中的带以一定的初拉力F0紧套在两个带轮上,张紧轮压在带的松边内侧并靠近大带轮[5]。张紧轮与轨道收缩装置实际为刚性连接的整体,在此称为张紧装置。当太空舱对轨道产生向下的拉力时,位于轨道收缩装置上传感器感知轨道绳索上的拉力大小,自动控制轨道收缩装置将轨道收缩相应长度。在轨道被收缩时,带的松边被进一步张紧而发生弹性变形,此时对张紧轮和轨道收缩固连成的一个整体受力分析如图3所示。
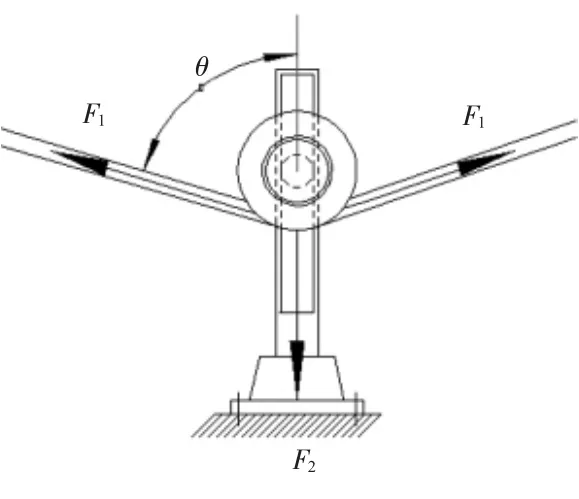
图3 张紧装置受力分析图
由图3可知:
其中:F1为带松边拉力,F2为轨道所受拉力,角度θ为松边张紧后形成角的1/2。通过(3)式可知该装置可以通过自动调节轨道的长度来改变角度θ的大小,从而达到自动平衡太空舱运行过程中对轨道产生的向下拉力保证月球天梯系统的稳定性的要求。

2 太空舱的运动方式
在物体运动的起点和终点,速度没有突变,则不存在刚性冲击;加速度没有突变,则不存在柔性冲击。刚性冲击只适用于低速场合,柔性冲击存在的运动只能够适用于中速场合,而在高速场合则应尽量避免柔性冲击和刚性冲击[6]。根据地月平衡点上地球对太空站的万有引力等于月球对太空站的万有引力,得太空站距基站的距离s=3.668 1×107m。考虑到太空旅游中的乘坐时间的舒适性问题,选择太空舱运行两天左右到达太空站,根据公式(4):

计算出太空舱运动的平均速度为215 m/s,此平均速度为高速运动,则太空舱的运动方式应该选择无刚性冲击和柔性冲击的运动。为使非匀速阶段 加速度连续且无突变,这里选择加速度方式为二次多项式,建立出模型如下:
加速度表示为:

速度表示为:

因为太空舱在轨道上运行时,在上升加速度阶段和下降减速阶段会对绳子产生向下的拉力(主要由惯性力导致),为了减小这个拉力则应减小加速度的大小,故选择加速度小但加速时间长的运动方式;太空舱运行时在上升减速阶段和下降加速阶段不用考虑对绳子产生的拉力,故选择加速度大但加速时间短的运动方式,考虑到这两个因素并结合(5)(6)两式便可得到太空舱运动方程。
为了初步计算出太空舱运动过程中的能耗,暂定太空舱运动过程中的加速度大小和加速时间如下:当太空舱处于上升加速阶段和下降减速阶段时,结合目前高铁的运动方式,选择加速度为0.5 m/s2左右,加速时间为10 min,及t1=600 s;当太空舱处于上升减速阶段和下降加速阶段时选择加速度为5 m/s2左右,加速时间为1 min,及t3=60 s。建立相应的等式,便可以求得每个阶段的m、n和c的值,得到太空舱的具体运动方式,见下页表1,其中t2=170 279 s。
3 太空舱的能耗计算
太空舱位于上升加速阶段时,对太空舱进行受力分析,得到此阶段的牵引力为:

式(7)中:Fy为月球对太空舱的万有引力,Fd为地球对太空舱的万有引力,Fg为加速度产生的惯性力,Fx为圆周运动产生的向心力。各力的计算公式如(8)式。

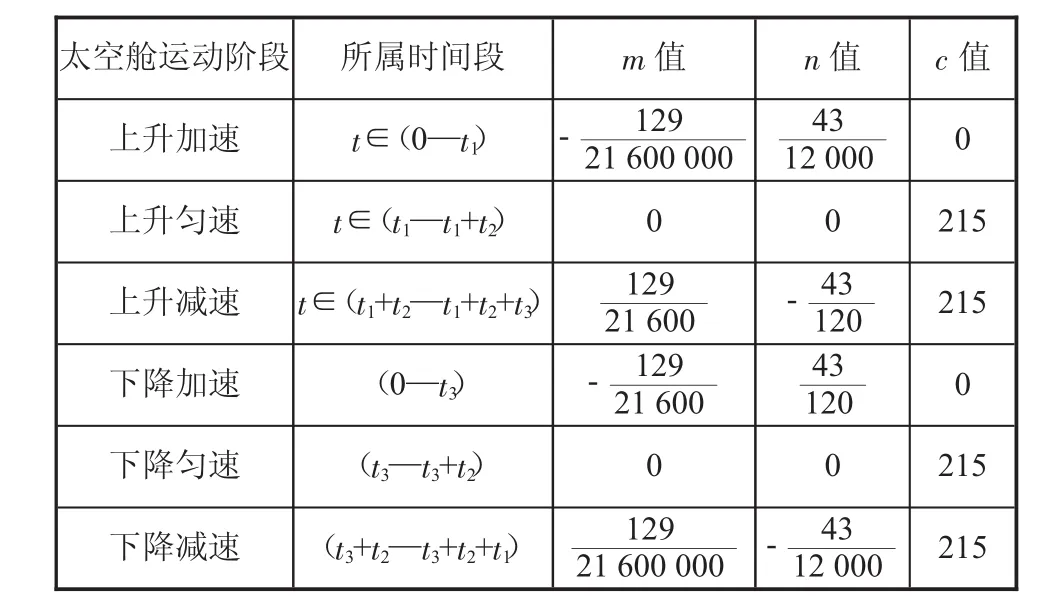
表1 太空舱运动方式参数表

功率表示为:

式中:G为万有引力常数,取6.672 59×10-11N·m2/kg2;m月是月球质量,取 7.349×1022kg;m地为地球质量,取5.96×1022kg;mc为太空舱质量,取100000 kg;L为地月球心间的距离,384 400 km;r月为月球半径,1 738.3 km;x为太空舱距基站的距离;T为月球自转周期,2 360 448 s。根据公式(8)(9)绘制出该阶段牵引力和功率图如图4所示。
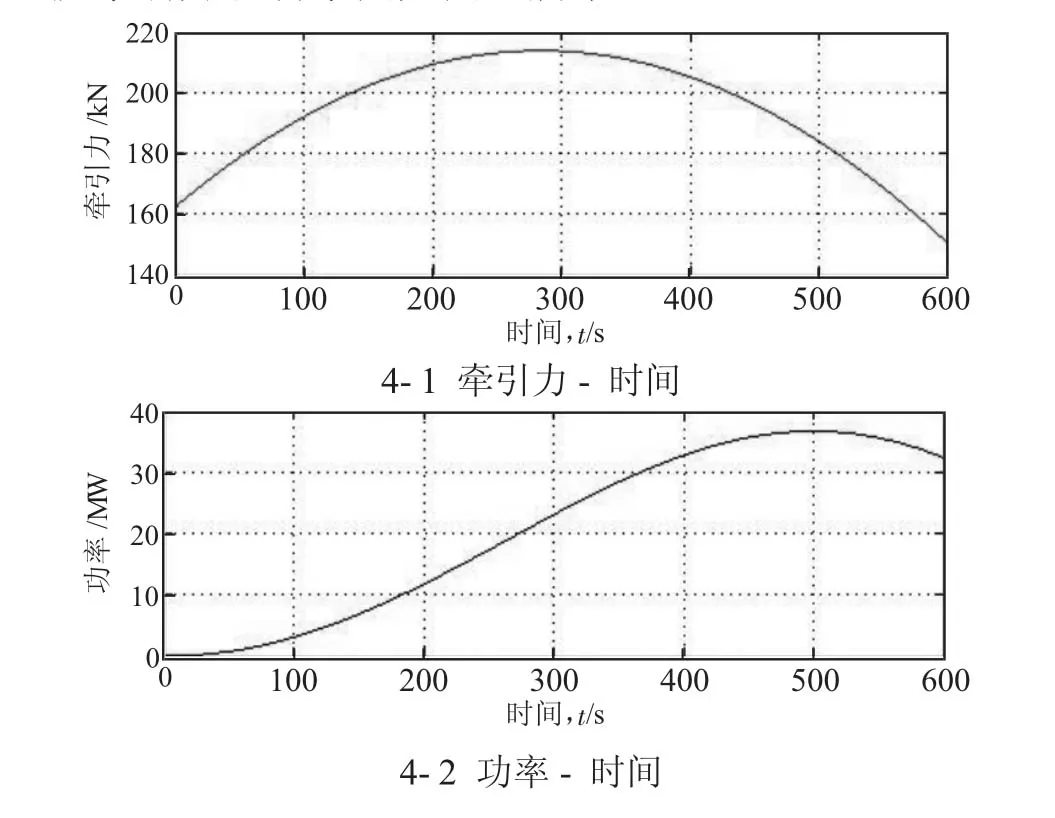
图4 上升加速阶段牵引力和功率曲线
太空舱位于上升匀速阶段时,此阶段牵引力为:

式中:s1是上升加速阶段走的位移,为64500 m。根据式(8)(10)(11)绘制出该阶段牵引力和功率曲线,如图5所示。
太空舱位于上升减速阶段时,此阶段牵引力为:
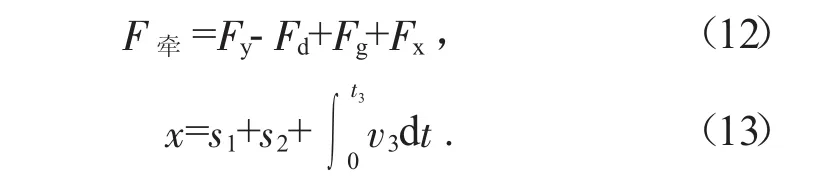
式中:s2是上升匀速阶段走的位移,36 610 050 m。根据式(8)(12)(13)绘制得到该阶段牵引力和功率曲线,如图6所示。
图5 上升匀速阶段牵引力和功率曲线
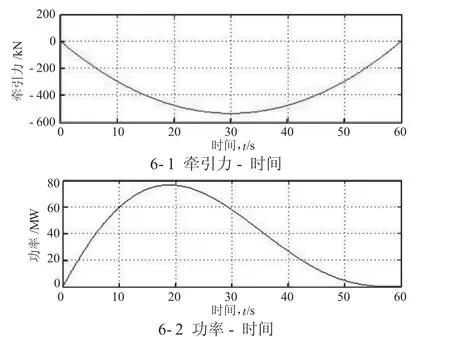
图6 上升减速阶段牵引力和功率曲线
太空舱下降阶段的运动形式和上升阶段相似,采用相同分析方法得到太空舱运动过程中不同阶段的最大牵引力、最大功率和能耗值如表2所示。

表2 太空舱运动情况表
根据表2,得到最终总能耗kW·h。
4 太空舱供能方式的选择
能源是太空舱正常运行的重要保障,在月球天梯系统中,供能方式的选择有着举足轻重的地位。目前主要的空间能源供应方式有太阳能供能、激光束供能、化学燃料供能、核燃料供能等[8]。其中:核燃料电池由于系统设备复杂和核裂变技术不好控制而被采用得较少;激光束供能为非接触供能,但整个运行过程中需要控制非常精准的聚焦,技术难度大;化学燃料供能由于体积大、质量重,其携带具有一定的限制,但为目前最为成熟的技术;太阳能电池供电在飞行器和航天器中被采用得比较多,一般设计为空间可展开的太阳能帆板结构。该技术目前处于研发初期,其产生的推力比较小,适合于质量轻一些的小型卫星或者无人航天器供能。
考虑到太空舱运动过程中需要的最大推力Fmax=5.375×105N,从短期上来看,只有传统的化学燃料供能方式才能提供足够的推力。结合现有的条件,国内能研发并生产推力为50 t的液氢液氧发动机、推力为120 t的新型煤油液氧发动机[9],此后开发出满足太空舱运动需求的化学燃料发动机是具有极大可行性的。但是从长远来看,太阳能帆供能作为一项不需要携带过重燃料的技术,具有功率大、寿命长、质量小、结构简单、性能可靠等一系列优点,在航天中的研究和设计一直受到各国的重视。目前,太阳帆推进技术已在地球的真空室内取得实验成功,随着太阳能帆板在各种航天器包括空间站、卫星、载人飞船上的应用与发展,如果未来能够克服其产生的推力小的弊端,则在太阳系内的星际间旅行人类将可能主要利用太阳能供能。在此假设下,下面也对太阳能帆的面积进行了简单的计算。
太阳光照通量I的表达式如下[10]:

其中:I*为1 AU处太阳帆单位面积受到太阳辐射的能量,成为太阳常数,数值取1 367 W/m2;r为星日距离,AU,这里取1(地月距离为36~40万公里,相对于地日距离1.5亿公里在此忽略不计)。
设太空舱太阳能帆板面积为S,能量转化效率为γ(根据目前技术,取20%),那么太阳能帆板能够为航天器提供的最大功率P0为:

已知太空舱运行过程中的最大功率Pmax=7.629×107W,则

结合式(14)(15)(16),计算得到所需太阳能帆板的面积为
5 结论
1)在月球天梯系统模型中,当太空舱在轨道上运行时轨道的受力是随时变化的。当太空舱处于上升加速阶段和下降减速阶段时,轨道的受力向下,在该力作用下容易导致太空站的位置发生改变,于是需要设立一个动力装置保持月球系统的稳定性。本文提出的动力装置的基本原理采用带传动,因为需要平衡的力比较大,故该装置中带的材料采用和轨道一样的碳纳米管。
2)考虑到乘客乘坐时间的舒适性问题,太空舱在轨道上需要高速运行,故太空舱的运动需要无刚性冲击和柔性冲击。本文提出了一种加速度二项式运动方式,该方式中的加速度大小和加速时间可以结合实际情况选取,其限制条件主要是考虑乘坐的舒适性问题和轨道的受力情况。
3)寻找供能方式中本文发现需要解决的最大问题就是推力问题,本文中太空舱运动过程中需要的最大推力Fmax=5.375×105N,目前能稳定达到要求的只有传统的化学燃料供能方式。未来空间供能技术中太阳帆供能因其具有功率大、寿命长、质量小、可实现性强等特点,目前成为太空供能系统研究的主要发展对象。一旦克服其目前产生的推力小的弊端,则未来会迅速成为太阳系内星际旅游的主要供能方式。
参考文献
[1]台文.“月球天梯”可梦想成真?[J].发明与创新(综合科技),2010(9):46-47.
[2]柯谱.太空电梯离我们又近了[J].国际太空,2013(9):50-56.
[3]汪小卫,鲁宇,刘丙利,等.天梯技术研究进展[J].导弹与航天运载技术,2015(2):41-44.
[4]李蒙,陈伟跃,杨胜,等.月球天梯力学特性研究[J].中国空间技术,2016(3):63-69.
[5]李良军.机械设计[M].北京:高等教育出版社,2010.
[6]黄茂林.机械原理[M].北京:机械工业出版社,2010.
[7]李子峰.用物体与微粒子的动量交换解释万有引力定律[J].中国西部科技,2011(28):1-3.
[8]毛冰晶,郭倩蕊,王本欣,等.空间大口径薄膜反射聚能系统[J].红外与激光工程,2012(2):424-436.
[9]哲言.50吨级液氢液氧发动机研制取得重大进展[N].中国航天报,2006-01-18(7).
[10]陈杨,宝音贺西,李俊峰.考虑功率因素的太阳能电推轨道优化设计[J].清华大学学报(自然科学版),2013,53(10):1 498-1 502;1 508.