解析船舶碰撞航标远程监测报警系统技术
2018-05-17唐磊
唐磊
摘 要:当今世界随着经济社会的不断发展,船舶交通安全在其中发挥着愈来愈重要的作用。本文提出一种船舶碰撞航标远程监测报警系统技术,该系统是由报警装置组成的,在分析裝置的功能、结构、工作原理等方面的基础上,实现对水上船舶碰撞航标危险的远程监测报警。
关键词:船舶碰撞 航标远程检测 自动报警系统
在船舶行驶过程中,由于受气候、通航环境(流向、流态、流速)等客观因素及驾驶人员自身业务技术主观因素的影响,经常发生船舶碰撞航标的情形,给相关设备、设施带来一定程度的经济损失,更为严重的是,一旦航标被损坏受影响最大的是其他正常通行的船舶,造成更多水上交通事故的发生。鉴于此,研究水上船舶碰撞航标危险远程检测报警技术,在安全监督管理船舶、确保水上交通的可持续发展、减少事故发生、保障船舶交通安全等方面具有深远而重要的意义。
1.国内外研究现状
为了给运输事业提供高效的服务,在上世纪90年代初航标远程监控监测系统利用现代通讯技术和电子技术就已建立起来,特别是世界上水上运输业较发达的水域。其主要应用于航标工作状态报警,自动控制供电设备监控航标灯器等多个方面。
最具有代表性的是在汽车的碰撞报警领域中,聚集了很多关于监测与报警碰撞的相关工业化应用。其原理在于当系统内的震动等开关量超过预设的阈值时,蜂鸣器由震动传感器带动工作,此时摄像头录像功能启动,图像采集卡等设备将录像的视频存下来,并告知车主碰撞的发生。然而对于江、海面这种露天环境下,可实现碰撞远程监测及报警、且具有图像传输功能的系统技术还没有实现突破性进展。由于船舶工作环境的特殊性,尤其是专用于船舶碰撞航标远程检测及报警的系统技术,几乎没有人重视研究。为了解决上述问题,本文设计了一种碰撞航标远程检测报警的装置。
2.系统工作原理
当船舶撞击航标后,航标上面的感应装置会接收到来自碰撞信号的激励,会触发系统对现场进行实时情形的记录,同时将报警信息发送出去。以下是工作流程:
(1)当碰撞没有发生时,航标灯等其他相关数据被系统所接受处理,由DTU传输到指挥中心。
(2)当航标感受到船舶的撞击时,会触发上面的加速度传感器,接着向控制器发送碰撞的信号。
(3)碰撞信号被控制器接收后,切换到碰撞监测及报警模式,停止其他相关监测功能。将摄像头初始化,同时调用拍照函数,摄像头接收到控制器的拍照命令后,控制器停止其他工作直到摄像头结束拍摄。
(4)摄像头在完成对现场的拍照后,会向控制器发送拍照结束信号,并将数据传输给控制器。
(5)按照预设的文件名、格式、路径,控制器将接收到的图像数据储存在SD卡中。随后初始化DTU,并调用数据传输函数,准备数据的传输工作,同时等待结束数据传输的信号。
(6)控制器通过RS232将之前保存的碰撞图片及设置好的短信内容发送给DTU,DTU将这些内容发送到指定的手机或者电脑上。控制器在数据传输结束时会接收到相应的信号。
(7)控制器恢复接收碰撞信号,这时碰撞监测的工作完成。
3.系统软硬件结构
由于水上环境复杂,我们通过对比相关产品和调研相关市场,本系统主要包含以下元器件:外部连接包括DC-DC电源线,稳压器,电池,机箱。正点原子S1216GPS模块、MPU60506轴加速度陀螺仪、七星虫SIM800AGPRSDTU传感器、ALIENTEKATK-OV2640摄像头模块、正点原stm32f407探索者开发板。
3.1机箱内硬件布置
系统硬件连接部分包括各模块之间的电气连接关系以及硬件在机箱内的布置。使用电机专用AB胶和机箱内的预制螺孔来固定机箱内的各元器件。其中使用电气专用AB胶将DC-DC变压器、DTU以及蓄电池粘接在机箱内。用螺钉将金属基座紧固在机箱上,主控板安装在两块金属基座上。为避免产生干扰,各连接线用扎带理顺。
3.2各元器件的电气连接
在开始编写程序前,首先弄清楚各个元器件的电气连接关系。图1是stm32f407与各元器件的通讯连接图。
图1可清晰地显示控制器stm32f407的引脚编号与GPIO编号,以及控制器端与GPS模块接口,SD卡,OV2640摄像头模块,232接口以及MPU6050加速度陀螺仪传感器的连接。值得注意的是,不可同时使用ATKMOUDLE与COM3,需要跳线进行选择。此外,也必须进行分时复用SDIO引脚接口与DCMI引脚接口,它们不能实现同时工作,因为其部分接口共用控制器的一些引脚。
3.3软件流程
本文中,参照相应的库函数来编写本系统的软件,不是直接修改相应地址中的某个值,是通过调用相应的函数来实现对各个硬件或者寄存器的操作,这样有效避免频繁的直接操作地址。开发系统软件利用库函数,使函数的调用显得十分直观与方便。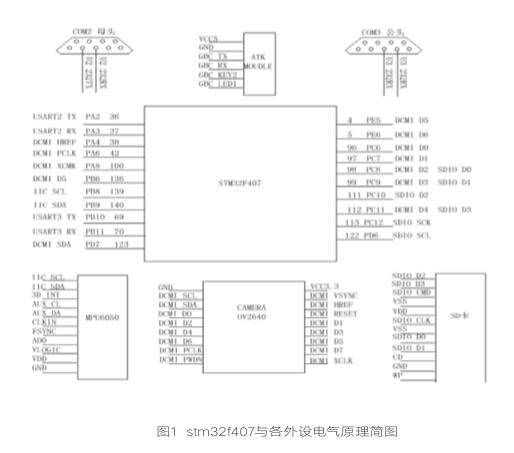
函数间的调用关系:
首先定义用来存放报警信息的单链表,然后编写各个需要的基本操作函数,然后写出主函数。主函数与其他模块之间的调用关系是:主函数中先调用LinkList 和L InitList_L(L)函数创建存放报警信息的空链表。
接着调用ListCreate_L(L,n)函数在空链表的基础上初始化报警信息,调用visit_L(L)函数显示所有报警信息。然后调用ListDelete_ L(L,i,x) 函数来实现出警并显示出警信息和ListInsert_L(L,i,x)函数来对报警系统进行插入信息。
为实现该监测报警系统的要求,以下功能模块是下位机的软件系统所包括的:DTU初始化,各电子器件初始化,读取DTU命令,在线检测DTU,采集加速度信号,读取串口1数据,获取GPS信息,摄像头拍照与发送图像等。图2是程序流程图。
4.结论
综上所述,本文主要解析了水上船舶碰撞航标远程监测报警系统装置,相比其他船舶监测报警系统装置,这种装置不仅可以大大减小水面船只事故发生的频率,同时也是一种保障船舶交通安全的技术。然而,本文所介绍的船舶碰撞航标远程监测报警系统的功能还只是原理性的,要想取得实际的效果还需要在今后的调试中逐渐加以改进,因此,接下来的任务是将其进一步完善,并且逐渐应用到实际的工作当中。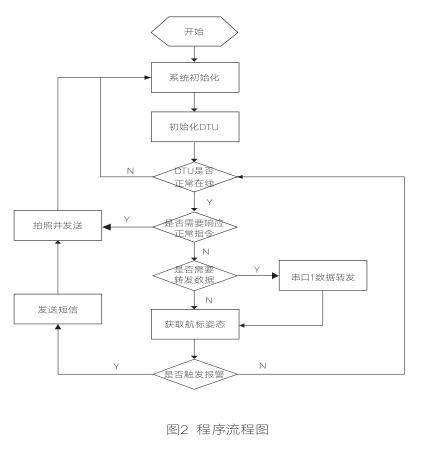
参考文献:
[1]陆文昌,徐贤,修彩靖.基于GPS与GSM的交通事故自动呼救系统的设计[J].中国安全科学学报,2008,(04):94-98.
[2]王静.车辆碰撞自动呼救系统触发算法研究及其终端设计[D].江苏大学,2015.
[3]王田苗.嵌入式系统设计与实例开发(第二)版[M].北京:清华大学出版社,2003.
[4]王英志.航标学.大连:大连海事大学出版社,1997.
[5]赵龙,闵昆龙,韩玉杰.基于智能手机群的车辆事故自救系统[J].计算机系统应用,2013,(02):34-36.
