四连杆机构传递误差对坦克射击精度影响分析
2018-05-17罗来科
张 磊,罗来科
(1.淮北职业技术学院机电工程系,安徽 淮北 235000;2.陆军装甲兵学院蚌埠校区,安徽 蚌埠 233050)
射击精度是反映武器系统性能的最重要技术指标之一.现代坦克火控系统为稳像火控系统,采用了大量高新技术,射击反应时间大大缩减,射击精度明显提高.但在实际使用训练中发现:有个别火炮在校正距离附近射击精度很高,但在对离校正距离较远的目标进行射击时,精度明显降低.其中一个原因就是四连杆机构在传递镜炮同步时产生的误差引起射角误差,使射手无法命中目标.本文就此问题探讨四连杆机构传递误差形成的原因以及对坦克射击精度影响并提出应对方法.
1 镜炮机构同步原理
稳像式坦克火控系统是利用四连杆机构实现镜炮同步的.瞄准镜的上镜体固定在炮塔顶部不动,随车体一起运动,通过四连杆机构链接火炮耳轴,使瞄准线与火线同步转动,利用瞄准镜中的解算器,解算出瞄准线与火炮的位置关系.四连杆机构如图1所示,由固定连杆、可调连杆、杠杆1、杠杆2组成.杠杆1连接反射镜,杠杆2连接火炮,在此平面四杆机构中,可调连杆和固定连杆、杠杆1和杠杆2长度分别相等,构成平行四边形[1].由平行四边形机构性质可知,当火炮仰俯转动ε角度时,杠杆1和杠杆2也将转动相同的精度ε.瞄准镜内上反射在1/2机构作用下,将向仰角方向摆动ε/2角度,根据平面镜性质,此时瞄准镜正好转动ε角度,从而实现了瞄准镜与火炮的机械同步.
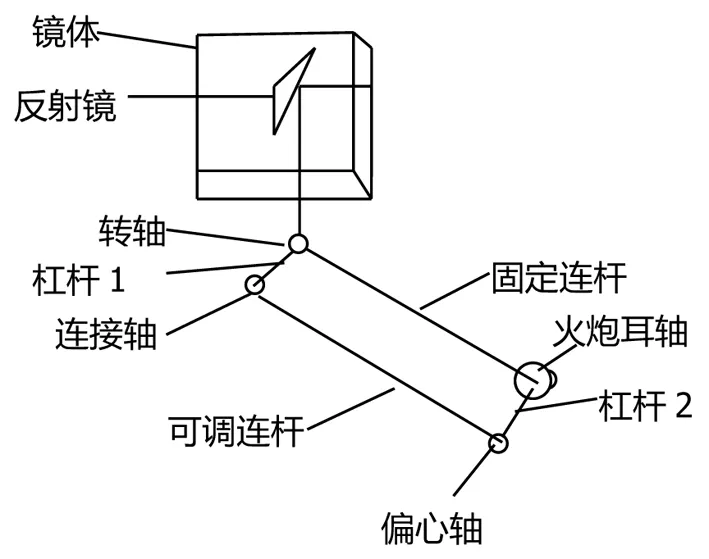
图1 稳像式坦克火控系统四连杆机构示意图
四连杆同步机构的特点是成本低、技术成熟、可靠性好、便于维修,在现代坦克火控系统中广泛应用,但是在现代战争中,坦克射击精度对四连杆机构机械传递的精度提出了更高要求[2].为确保坦克首发命中,必须分析四连杆机构的传递误差,为提高射击精度奠定基础.
2 传递精度分析
由于四连杆机构加工制造和安装误差等原因,当坦克在恶劣的环境中使用时,会产生零件弹性变形现象,此时平行四边形对边不再相等,变成任意四边形[1],产生传递失调角.如图2所示,l1为杠杆1,l2为杠杆2,l3为可调连杆,l4为固定连杆.l1≠l2,l3≠l4,使β1≠β3,两夹角的差值记为初失调角Δβ0,即Δβ0=β1-β3.
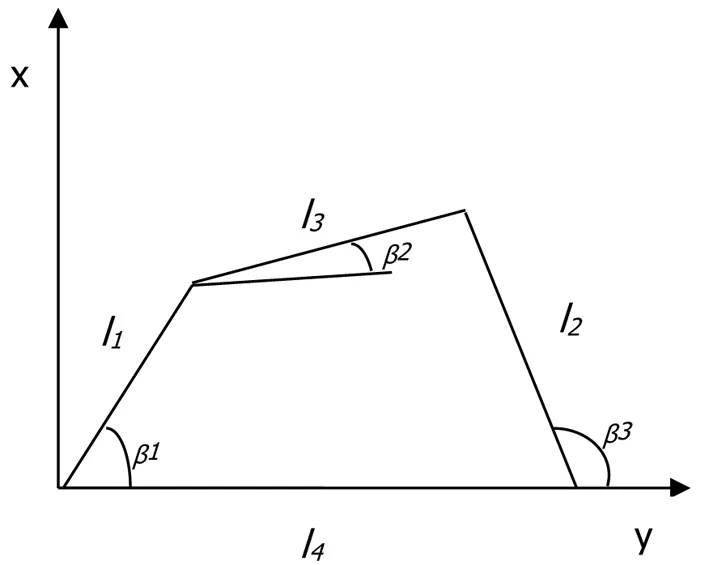
图2 四连杆机构传递失调示意图
当火炮射击时需要装定ε角瞄准角,火炮就要仰起ε角,当杠杆l2转动了ε角后,而杠杆l1转动了ε′角,由于通常情况β′1≠β′3,此时两角之差记为末失调角Δβ=β′1-β′3.
四连杆机构运动过程中的传递误差大小采用失调角之差表示,即
Δε=ε′-ε=Δβ-Δβ0
(1)
式中:Δε为传递误差,ε为火炮射角,ε′为杠杆l1转动实际角度,Δβ0为初失调角,Δβ为末失调角[1].
传递误差主要是由于边长误差所引起的,假设杠杆l1、l2之间长度误差为Δl12,连杆l3、l4之间长度误差为Δl34,失调角为Δβ0.由于边长误差、失调角和瞄准角均较小[1],通过微分运算,可得传递误差如下公式:

(2)
对上式分析可得出如下结论:①四连杆机构传递误差与杠杆长度成反比,杠杆越长,其传递误差越小,这与实际车型发展一致[1];②边长误差Δl12、Δl34对传递误差的影响大小不同,杠杆长度差Δl12的影响大于连杆长度差Δl34的影响;③火炮瞄准角越大,传递误差越大,当Δε为正时,瞄准线的转角要比火炮转角大,与实际射击误差基本一致;④当β1=900时,即平行四边形为矩形或接近矩形时误差较小,当β1<900时,β1越小,传递误差越大,当β1>900,β1越大,传递误差也越大,如Δl12=10mm,Δl34=-5mm,β1=750时,Δε=0.168mil.
3 传递误差对射击精度的影响分析
坦克射击精度主要由火控计算机根据火控系统的各种传感器自动采集影响弹道的参数以及人工输入的环境、弹种等参数解算出的瞄准角精度决定的.由于现代坦克武器系统加装很多传感器,大部分影响射击精度的因素都得到了解决,射击精度大大提高.但是实现镜炮同步四连杆传递误差没有传感器测量,无法参与解算,四连杆传递误差引起瞄准角大小改变,直接影响坦克射击的精度,增大了远距离射击误差,降低了射击精度,因此,要研究传递误差对射击精度的影响[3].查某射表可得不同弹种射角改变1mil的射击距离改变量以及弹道高改变量.如表1所示,射角大小改变直接影响射击距离和弹道高,进而影响射击精度.例如,由于四连杆传递误差使射角大小改变0.2mil,对3000m目标射击,将使弹道高改变0.628m,射击距离改变108 m.由于坦克射击的目标多为装甲目标、有生力量、防御攻事等目标,高度一般在2m左右,当传递误差大于0.5 mil时,对2000m以外的目标射击,就会脱靶,这也与实际射击情况相符.

表1 射角变化对射击精度的影响
4 提高射击精度的措施
由于镜炮同步传递误差对坦克射击精度有重要影响,其不同步的主要原因有以下几个方面:①杠杆1与杠杆2、固定连杆与可调连杆对应长度不等组成非平行四边形四连杆机构的传递误差;②上反射镜组件内部传动链的传动误差[4].其中上反射镜组件的传递误差可在精确校炮环节消除,可以采用如下措施消除传递误差,提高火炮射角精度.
4.1 提高四连杆镜炮同步机构检查调校精度
四连杆机构的传递误差由边长误差引起的,需要通过调整偏心轴和可调连杆来消除.假设Δl12和Δl34同时存在,精确确定Δε与Δβ的关系有一定困难,此时Δl12和Δl34要利用偏心轴,对可调连杆分布进行精确的调整[1].
4.2 改变综合修正量
在不能进行调校四连杆机构的情况下,可根据式(2)的计算结果,改变火控计算机的高低综合修正量的大小,来改变瞄准角的大小,从而提高火炮的射击精度,修正量按照大小相反的方向装定[5].
4.3 变更瞄准点
根据公式(2)的计算结果,变更瞄准点.例如,四连杆传递误差使射角大小增加0.2mil,对3000m目标射击,将使弹道高改变0.628m,需要降低1/4目标梯形.
参考文献:
[1]刘俊帮,张猛,梅晨,等.某型突击炮镜炮同步的调校原理及方法[J].火炮发射与控制学报,2003,(6):51-54.
[2]张日飞,吴勇.四连杆机构在坦克火控系统中的应用[J].火力与指挥控制,2008,(3):115-116.
[3]张洁,王丹,陈五一,等.转动副临界角分析及其在四连杆机构中的应用[J].北京航空航天大学学报,2016,(12):2738-2744.
[4]朱竟夫,赵碧君,王钦钊.现代坦克火控系统[M].北京:国防工业出版社,2003.
[5]王东军.96A坦克武器与使用[M].北京:解放军工业出版社,2007.
