基于序列图像的组合摄影机外场同步标定技术
2018-05-14黄莎莎乔嘉柳琦
黄莎莎 乔嘉 柳琦


摘要:多台摄影机联合拼接测量运动大目标时,由于被测物体大、摄影距离远导致摄影机的测量结果受影响,该文针对提出组合摄影机大视角同步标定技术。并基于序列图像,在测量之前对所用的测量摄影机进行精确标定,通过将多个摄影机进行固联标定的方法,对采集到的序列图像进行编码标志自动提取,然后采用光束法平差方法进行计算,可快速且准确地获得摄影机的内方位元素和外方位元素。实验数据分析结果证明:组合摄影机同步标定策略具有一定的适用性、可行性以及标定精度。
关键词:飞行试验;组合摄影机;同步标定;大视角
文献标志码:A
文章编号:1674-512412018)02-0108-05
0引言
大型飞机在飞行中由于受气动力影响,机翼会发生较大的弹性变形,主要包括扭转和弯曲变形,这些显著的变形,将会造成机翼外载荷大小和分布的变化,甚至引起机翼升力面内部结构载荷的分配变化,造成飞机机翼使用状态与设计状态的偏离,从而影响飞机性能,甚至危及飞机安全和寿命。而目前先进飞机设计中,变形的主动利用、机翼可变弯度计算机控制、理论计算模型优化等方面的研究都迫切需要真实飞行环境中变形实测数据作为支撑,从而开发和验证目前的气动弹性修正模型,因此准确获取飞机机翼弹性变形数据在试飞验证、设计改进等方面具有重要意义。
机翼弹性变形测量之前,需要对所用的测量摄影机进行精确标定,才能保证机翼变形测量结果的准确性,这也是摄影测量的前提和关键。标定一方面需要得到摄影机本身的内方位元素,包括像主点、焦距值、镜头畸变参数等:另一方面需要通过标定精确计算出摄影机架设后的空间位置和姿态参数,也就是外方位元素。
目前,我国在大型飞机的机翼弹性变形测量方面,基本没有能借鉴的成功案例,这也是首次采用非接触式的方法进行机翼变形测量。由于被测对象较大,需要多台摄影机联合拼接测量才能实现整个翼面的变形测量:而且摄影距离较远,采用实验室常用的控制板和控制架的模式进行标定无法保证测量精度,同时由于摄影距离的差异将会造成成像質量下降等无法进行最后的解算,因此必须建立室外大型标定控制场,对组合摄影机进行大视角远距离精确标定,拟达到实际飞行应用中机翼变形测量的测量精度。
1组合摄影机标定原理
摄影机标定一方面需要得到摄影机本身的内方位元素,主要包括径向畸变、偏心畸变、薄棱镜畸变、像主点偏心、焦距等:另一方面需要通过标定精确计算出摄影机架设后各摄影机之间的位置、姿态相对参数,为机翼变形测量解算提供基础参数。标定流程图如图1所示。
摄影机成像的理想模型是小孔成像模型,在这个模型中,物方点、镜头中心和像点三点共线,但理想的摄影机是不存在的。对基于数字摄影机的摄影来说,干扰成像的因素主要有摄影机镜头的径向畸变和偏心畸变、薄棱镜畸变。另外内方位元素(x0,y0,f)的误差,会干扰共线方程的成立。引入畸变误差后的共线方程为
1.2外方位元素标定原理
采用光束法平差计算获得每台摄影机相对全站仪测量坐标系的旋转矩阵R和平移矩阵T后,令基准摄影机的旋转矩阵为RL,组合摄影机中的其他摄影机的旋转矩阵为R右;基准摄影机的平移矩阵为TL,组合摄影机中的其他摄影机的平移矩阵为T右,则组合摄影机中的其他摄影机相对于基准摄影机的关系可由下式计算获得:
2试验与分析
2.1数据采集
首先,建好室外大型控制墙和图像采集系统,为了接近实际的飞行应用而建的大型标定控制场长度>50m、高度>10m,根据实际测量对象的尺寸和范围粘贴测量标志,以保证每一台摄影机能够拍摄到足够解算的测量标志。图像采集系统由两组组合测量摄影机组成,在实际飞行试验中,两组摄影机分别加装在飞机垂尾前缘防护罩内的顶部和中段,每组摄影机分别由5部摄影机组成,其中每组中间的摄影机拍摄机身上的基准点,作为摄影机运动修正测量摄影机,其他摄影机拍摄机翼上的散斑,上下对应的摄影机相互之间构成立体交会模型,以实现飞机机翼弹性变形测量。本文根据飞行实际搭建了室外大型标定场和图像采集系统,如图2所示。
其次,建立以全站仪为原点的三维坐标系,利用全站仪测量控制墙上的每个标志点,获得标志点的坐标。
然后,因各个摄影机的内方位元素之间无约束关系,通过操作三脚架,使组合摄影机做上下、左右和滚转运动,通过同步触发控制器,完成组合摄影机的影像同步采集,获得内标定序列影像数据。
最后,模拟系统装机状态,在静态环境下,完成组合摄影机的影像同步采集,获得基准摄影机的外标定影像数据,为解算各个摄影机的外标定参数做数据准备。
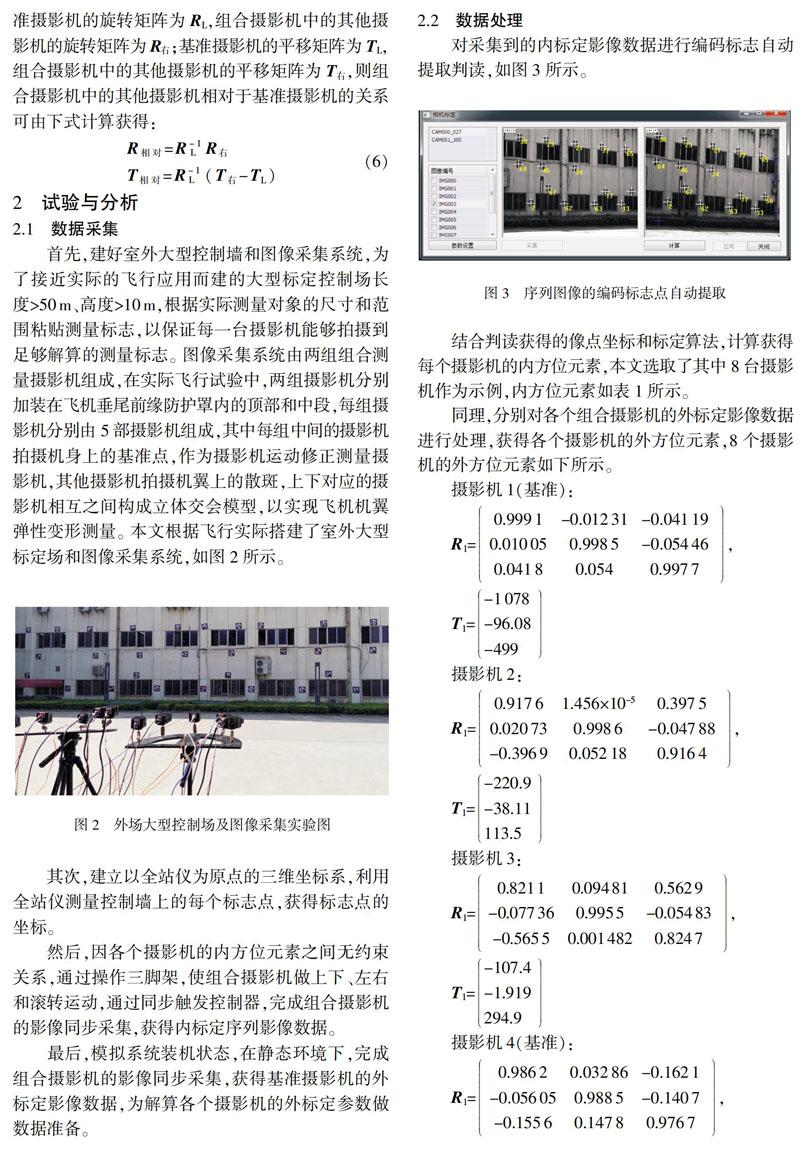
2.2数据处理
对采集到的内标定影像数据进行编码标志自动提取判读,如图3所示。
结合判读获得的像点坐标和标定算法,计算获得每个摄影机的内方位元素,本文选取了其中8台摄影机作为示例,内方位元素如表1所示。
同理,分别对各个组合摄影机的外标定影像数据进行处理,获得各个摄影机的外方位元素,8个摄影机的外方位元素如下所示。
其中,摄影机1和摄影机4为基准摄影机。至此,摄影机的内方位元素和外方位元素标定完毕,可应用于机翼变形计算中。
2.3准确度分析
获得组合摄影机的内方位元素和外方位元素之后,进行机翼散斑工程计算,从计算结果中随机抽取几个编码标志点的坐标,对它们进行点一点之间的线计算,如图4所示。然后与全站仪测量出的结果进行对比,获得实验室标定与外场标定的误差对比值,如表2和表3所示。
从表2和表3中可以看出,在实验室里测量距离为2.5m时,误差绝对值平均值为0.4mm,最大误差绝对值为1.5mm;外场标定距离约为25m,误差绝对值平均值为1.4cm,最大测量绝对值为2.2cm,外场测量距离与实际飞机机翼变形测量距离相差无几,测量精度能满足试飞试验中机翼变形测量的精度要求。
3结束语
基于序列图像的组合摄影机外场同步标定技术,通过对序列图像进行编码标志自动提取判读,降低了人工判读的误差,提高了标定结果精度,并且实现了组合摄影机中各个摄影机的内方位元素同步标定,以及各个组合摄影机的外方位元素同步标定,最大限度地提高了数据处理效率。更重要的是,大型标定场最大程度的接近大型飞机机翼变形测量的标定距离和范围,且标定精度满足要求,为后期系统的实际应用及数据处理的可靠性提供数据支持。
