线电压调制的PWM逆变器相电流重构策略
2018-05-14程明姜云磊王伟王青松
程明 姜云磊 王伟 王青松


摘要关键词:PWM逆变器;相电流传感器;容错控制;线电压调制
DOI:10.15938/j.emc.2018.02.002
中图分类号文献标志码:A文章编号:1007-449X(2018)02-0009-08
CHENG Ming,JIANG Yunlei,WANG Wei,WANG Qingsong
(School of Electrical Engineering, Southeast University, Nanjing 210096, China)
Abstract:To ensure that pulse width modulation (PWM) inverter driving system can operate reliably once faults of phase current sensors occur, a phase current faulttolerant method based on line voltage modulation is proposed. Considering the principles of line voltages modulation, duty cycles of three bridges was calculated firstly.Then, duty cycles were rearranged in order to meet the sampling requirements by applying modification to the calculation results.Finally, compensation duty cycles were obtained for the purpose of balancing the changes added. Besides, causes of reconstructed current errors were analyzed in detail and a modified πtype snubber circuit was given, which aims to eliminate current errors from the resonant process between DClink and cushion capacitance while performance of snubber circuit was kept to a large extent. The effectiveness and reliability of the proposed faulttolerant method are verified by both simulated and experimental results.
Keywords: pulse width malulation inverter; phase current sensor;faulttolerant control;line voltage modulation
0引言
电机驱动系统的容错运行能力一直是国内外诸多学者关注的重点[1-2]。当前对电机容错运行的研究主要集中于电机驱动系统中单相或多相发生开路、短路故障时的容错运行能力[3-5],而作为整个电机驱动系统重要部件的相电流传感器,其故障运行策略则相对较少被提及。
通常来说,为了获得安全、稳定的电机控制性能,三相电压源型PWM逆变器需要加装2个交流电流传感器进行电流闭环控制,1个直流电流传感器进行过载监测和短路保护。一旦交流电流传感器发生故障,PWM逆变器将无法正常运行。为了提高驱动系统的可靠性,有必要对电流传感器进行容错控制,使得故障发生后依然能夠依靠残留的电流传感器重构出三相电流。
目前,电压源型PWM逆变器电机驱动系统的相电流重构策略有基于电流滞环[6]、状态观测器[7]和矢量重构[8-11]等多种方法。前两种方法均不同程度存在响应滞后,参数设计复杂等问题。而对于基于矢量重构的PWM逆变器相电流重构,当施加有效电压矢量时,直流母线电流将能准确的映射某相相电流信息。通常情况下,经典的七段式空间矢量调制方法在一个周期内产生两个不同的有效电压矢量,这就意味着在一个开关周期内可以采集得到两相电流信息,另一相则通过三相电流之和为零计算出。但是,由于传感器A/D转换,直流母线电流建立都需要一定的时间[12],故矢量重构的方法会存在一定的采样盲区。
对采样盲区进行缩减的方式主要有两种。其一是减小A/D采样时间、死区时间或母线电流建立时间等。在电机驱动系统中,缩短A/D采样时间和死区时间对传感器与驱动电路的性能均提出了更高的要求。从不增加电机驱动系统成本的角度考虑,对影响母线电流建立时间的因素进行分析并加以处理具有重要的理论和工程意义。其二是通过矢量重构对采样盲区进行特殊处理,使得有效矢量的作用时间满足相电流重构的需求。显而易见,矢量重构方法的缺点在于计算相对复杂,不利于数字实现。
基于上述原因,本文提出了一种基于线电压调制策略的简化相电流重构方法并分析改进了直流母线缓冲电路。在保证与矢量重构方法相同的空间矢量利用面积的前提下,所提方法可以实现相电流传感器故障情况下的可靠容错运行。此外,相比于传统的PWM逆变器缓冲电路,所提出的π型缓冲电路具有缩短直流母线电流建立时间,提高母线电流采样质量的作用。本文基于一台5.5 kW三相永磁同步电机,通过仿真与实验验证了所提缓冲电路与控制策略的有效性。
1PWM逆变器相电流重构系统
图1所示为一台三相电压源型PWM逆变器,该系统的基本工作原理如下:定义三相上桥臂的开关管状态分别为Sa、Sb、Sc,定义导通时为状态“1”,关断为状态“0”。三相电压源型PWM逆变器理论上可以提供8种不同的开关状态。直流母线电流与电机相电流的关系可以由PWM逆变器的开关状态决定。当开关状态(111)和(000)作用时,电机三相绕组形成环路,逆变器不向电机绕组提供有效相电流,母线电流不能反映交流测电流的任何信息。图1所示开关状态为(100)时的电流流通路径。此时直流侧电流idc与A相电流ia相同,通过采样得到的母线电流可以直接反映a相电流。相似的,在其余5种开关状态中,都可以得到一相电流信息。这6种能从母线电流提取出相电流信息的开关状态被称为有效开关状态。
相电流重构的基本原则是在有效开关状态时间内通过对母线电流进行采样并映射到对应相电流。在实际的控制系统中,为了完成可靠采样,有效开关状态的持续时间必须维持一个安全采样时间Tsafe [13],该时间由死区时间Td、开通关断延时Ton、母线电流建立时间Tset和A/D采样时间Tconv共同决定,即
Tsafe=Td+Ton+Tset+Tconv。(1)
当有效矢量的作用时间小于Tsafe时,相电流将不能从母线电流中有效提取。
2杂散参数影响与缓冲电路优化
2.1影响母线电流采样精确度的主要因素
在相电流重构系统中,三相电流都来源于在一个开关周期内对母线电流信息的解析与重构,因此,母线电流的精确与稳定显得至关重要。母线电流是多种电流成分的叠加,除了所需的电机相电流之外,还有来源于缓冲电容和线路寄生电感等成分的电流分量。这些电流分量不参与电机的机电能量转换过程,属于无效的直流母线电流分量,在母线电流采样的过程中应尽量去除这些成分。
在多种无效的母线电流成分中,主导成分是吸收电容和线路寄生电感所引起的LC谐振电流。在电机驱动系统中,由于母线杂散电感和其中di/dt的共同作用,开关器件在开通关断过程中会承受很高的尖峰感应电压[14]。为应对这一问题,一般需要在直流母线上靠近开关器件的位置并联吸收电容以保证功率器件的安全运行。然而,当开关状态发生变化,母线上存在的杂散电感很容易与缓冲电容发生谐振。图2所示为开关状态变化后的母线电流示意图,在死区时间Td和开通延时Ton之后,母线电流波形并没有完全与理想电流一样迅速上升,而是经过数个周期的振荡之后才趋于稳定,并且由于母线等效电阻小,谐振电流需要很长的时间才能完成衰减。
在相电流重构策略中,谐振电流会增大母线电流稳定时间Tset,尤其不利于系统的正常运行。文献[15]在试验中观察到了这一现象,并指出应对该振荡时间段进行避让,即等待其相对平稳后再进行A/D采样。然而,避让措施无疑进一步扩大了矢量重构方法中本就存在的盲区,从而降低相电流重构的精确度。
2.2π型缓冲电路与LC阻尼电阻
从对母线谐振电流的分析可以得知,线路中寄生电感与保护用缓冲电容形成的二阶LC谐振是制约母线电流采样精确度提高的主要因素,这一现象的直接结果是使得母线电流稳定时间Tset变长甚至失去测量意义。为了克服这一问题,在这里研究了一种缓冲电容分裂的π型缓冲电路。
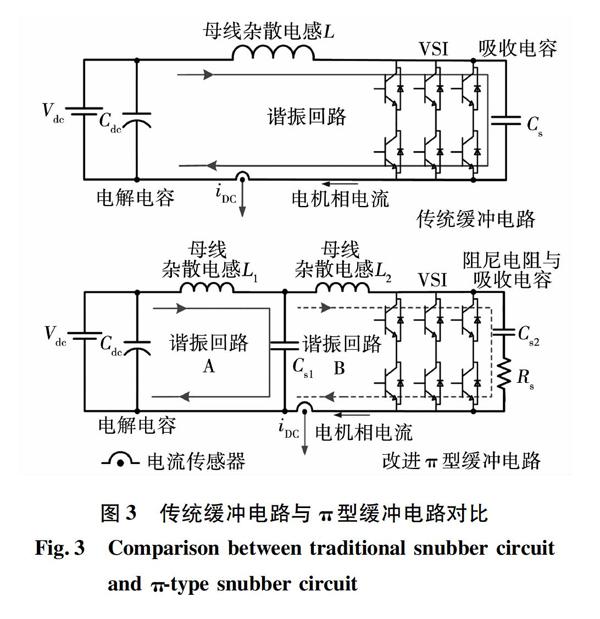
π型缓冲电路与传统缓冲电路的对比如图3所示。传统的缓冲电路中,Cs布置于母线终端桥臂两侧以吸收杂散电感L产生的感应电压,从图中的谐振回路路径可以看出,较小的母线等效电阻使得谐振回路中阻尼很小,不利于谐振电流的衰减。而在π型缓冲电路中,缓冲电容Cs1、阻尼电阻Rs与吸收电容Cs2的串-并联组合取代了Cs。Cs1将直流母线杂散电感分为了两部分:L1为吸收电容Cs1布置位置之前母线的杂散电感;L2为吸收电容Cs1与Cs2布置位置之间母线的杂散电感。Cs2与阻尼电阻Rs的串联组合被直接布置在桥臂两侧;Cs1靠近IGBT桥臂,位于电流传感器之前。这样,以Cs1为分界,主电路中存在两个谐振回路:谐振回路A及谐振回路B。由于母线寄生电感值一般与线路长度正相关,线路杂散电感L2应远小于L1。当三相PWM逆变器运行时,L1产生的感应电压由Cs1吸收,虽然该谐振回路中的阻尼很小,但谐振电流不流经电流传感器;L2与Cs2构成的谐振回路上由于阻尼电阻Rs的存在,谐振电流快速衰减,对谐振回路B内的电流传感器影响很小。关于阻尼电阻的选取,Rs取值若太小,阻尼效果不佳;Rs取值若太大,则会影响吸收电容上的能量泄放。为了兼顾这两者,阻尼电阻的选取需满足如下约束[14]:
2L2/Cs2≤R≤τ04Cs2。(2)
3线电压调制的相电流重构策略
3.1线电压调制策略原理
相电流重构策略的基本原理一般是将有效矢量进行分解,以获取足够的采样宽度。根据第1节的分析,要实现系统稳定可靠的相电流重构,必须获得足够宽度的有效矢量长度,这种方法需要对有效矢量在电压空间中的位置进行重新排布,以完成对采样盲区的避让,其缺点是计算量相对较大,不利与在微控制器中进行数字实现。
为了实现相电流重构方法的快速计算,本节采用了一种从线电压角度考虑[16-17]的调制方法,该方法在根据PI控制器计算得到dq轴参考电压Ud_ref,Ud_ref之后,直接获取三相PWM占空比,并从三相占空比空间位置合理分布的角度进行调整,该调整策略的具体执行流程如下:
桥臂A和C、桥臂B和C之间的线调制比mAC和mBC分别为:
mAC=δA-δC,
mBC=δB-δC。(3)
式(3)中:δA、δB与δC分别为A、B、C三相脉冲的占空比。任意满足式(3)中线电压要求的占空比都是有效的,但是由于占空比取值在0到1之间,δC必须满足如下条件:
δC+mmax≤1,
δC+mmin≥0。(4)
式中mmax与mmin分别是线调制比中的最大值和最小值,可通过下式描述:
mmax=max{mAC,mBC},
mmin=min{mAC,mBC}。(5)
结合式(4)中的约束条件,可获得δC取值范围:
δC_max=min{1-mmax,1},
δC_min=max{-mmin,0}。(6)
為了使线电压调制的效果与七段式空间矢量调制下的零矢量等分原则等效,δC可由式(7)确定。
δC=δC_max+δC_min2。(7)
进而,根据式(3)可得AB两相占空比:
δA=mAC+δC,
δB=mBC+δC。(8)
式(3)到式(8)过程的输出结果与七段式空间矢量调制方法等效,区别在于省去了计算有效矢量作用时间的过程并直接得到满足调制需求的三相占空比δA、δB与δC。
3.2占空比调整方法
将所获取的三相占空比δA、δB与δC按照大小排序为δmax、δmid与δmin。以图4为例,将一个开关周期分为前后两个部分,在前半个周期内进行采样,后半个周期内进行补偿。δmaxs、δmids与δmins为调整后的采样占空比;δmaxc、δmidc与δminc为补偿占空比,两组占空比之和构成一个开关周期内的总占空比δmax、δmid与δmin。图4中的阴影部分分别为有效电流I与有效电流II的作用时间,三相占空比大小关系与相电流之间的映射关系如表1所示。
电流重构采样过程要求采样占空比之间的差值要满足大于δw的条件才能完成有效重构。根据δmaxs、δmids与δmins的取值关系可以分成如下4种情形,分別予以具体讨论:
1)δmaxs-δmids≥δws,δmids-δmins≥δw。
此时,由于三相占空比的空间位置差同时满足采样窗口时间的限制,三相占空比不需要调制便可直接输出。
2)δmaxs-δmids≤δw,δmids-δmins≥δw。
这种情况下,最大占空比δmax与中间占空比δmids之间的空间排布不满足采样要求,需要将最大占空比δmaxs拓展为δmids+δ w时,中间占空比和最小占空比大小不发生变动。
3)δmaxs-δmids≥δw,δmids-δmins≤δw。
这种情况下,中间占空比δmids与最小占空比δmins之间的空间排布不满足采样要求,需要將最小占空比δmins压缩至δmids-δw,同时,中间占空比和最大占空比大小不发生变动。
4)δmaxs-δmids≤δw,δmids-δmins≤δw。
这种情况下,最小占空比δmins与最大占空比δmaxs的空间排布同时不满足采样要求,需要将最小占空比δmins压缩至δmids-δw,将最大占空比δmaxs拓展为δmids+δw。
上述4种情况分别分析了最大占空比、最小占空比和中间占空比在不同组合情况下的处理方法,其特点在于中间占空比δmid的大小始终不发生变化,仅δmax与δmid发生变化。
根据占空比的定义,需要满足大于0且小于1的约束条件,当重构后的占空比δmax大于1或δmin小于0时,上述调制过程显示了其局限性。为了扩大调制范围,需要对中间占空比δmid进行变动,处理过程分别如下所示:当δmax大于1时,δmax=1,δmid=1-δw且δmin不变;当δmin小于1时,δmin=0,δmid=δw且δmax不变。
如图5所示为调整前与调整后的三相占空比波形。如图5(a)所示为调整前占空比,占空比的交接区域由于占空比差值太小以至于不满足采样需求,在这一区域内为理论上的采样盲区;图5(b)与图5(c)所示为调整后的占空比与补偿占空比,在采样盲区内交接的占空比大小或被拉伸或被压缩,同时拉伸或压缩量在图5(c)补偿占空比内被平衡。基于线电压调制的占空比调整策略的算法总体执行流程如图6所示。
4.1电流重构控制系统方案
基于线电压调制的电压源型PWM逆变器相电流重构控制框图如图7所示,该控制系统的主体包含一个DSP控制器和一个FPGA控制器。DSP控制器负责包括1个转速外环和2个电流内环在内的数学运算;FPGA控制器则完成相电流重构所需非对称PWM生成和采样时间点的控制。
当电机及其控制系统正常工作时,在每一个控制周期中,通过光电编码器测量并计算得到电机的转子位置θr与转速ωr,与给定转速ω*r比较后经转速PI调节器得到给定交轴电流分量i*q;之后,通过FPGA内的占空比重构逻辑生成PWM脉冲信号,再经三相电压源型逆变器作用于PMSM上。
4.2π型缓冲电路效能验证
实验过程中比较了在开关状态切换状态、母线电压、电机转速与负载均相同,仅缓冲电路不同情况下的母线电流波形,此时电机转速为300 r/min。通道1、2、3分别为A、B、C三相桥臂的上管开关信号,通道4为母线电流波形。图8(a)是设置吸收电容为1 μF时的母线电流波形;图8(b)是设置吸收电容为0.1μF时的母线电流波形;图8(c)是采用π型缓冲电路及阻尼电阻之后的母线电流波形。图8(a)、图8(b)、图8(c)所示3种情况下所需的母线电流稳定时间Tset分别为18 μs、10 μs和4 μs。图8(a)、图8(b)的对比显示,当采用普通缓冲电路时,尽管吸收电容的取值有所不同,母线上的谐振电流仅仅是幅值和频率发生变化,即电流采样的质量并没有从根本上得到提高,仍然会对电流重构性能产生很大影响。图8(c)中的母线电流波形表明,当采用改进的缓冲电路之后,等待母线电流稳定建立的时间极大的缩短。
4.3相电流重构方法实验验证
为了验证所述算法的效果,设计了两组试验分别验证其在不同电频率和不同调制比时的效果。图9是采用本文所述相电流重构方法后所得的电流波形,图9(a)为PWM占空比未经调整时从母线电流中重构出的A相电流,从中可以看出,当有效开关状态的保持时间不满足安全采样的需求时,根据母线电流所获取的A相电流波形在采样盲区内发生畸变;图9(b)左右两侧分别是转速为300 r/min和1 000 r/min时A相重构电流和真实A相电流的对比,这两组波形验证了所述策略在宽转速范围内具有很好的电流重构性能;在图9(c)中,电机转速维持在300 r/min且负载转矩为9.5 N·m恒定,稳态时电压矢量的圆形运行轨迹保持不变,定义调制比m为
m=|Vref|Udc/3。(9)
|Vref|为参考矢量幅值,Udc为直流母线电压。当母线电压低时调制比较高,电压轨迹落在高调制区内;母线电压高时,调制比较低,电压轨迹落在低调制区内。
实验过程分为两段:低调制区内母线电压被设定为150 V,调制比m为0.91;高调制区内母线电压被切换到70 V,调制比m为0.42。图中所示的真实电流和估计电流波形验证了在宽PWM调制区域内(从低调制区到高调制区再到低调制区)都能准确的重构电机相电流。
如图10所示,为了清晰地表现采样时刻、母线电流与三相PWM信号之间的关系,通过示波器同时测量了这些信号。在一个开关周期内有3次采样脉冲,其中前两个分别对应有效电流I和II。从放大图中可以看出,经过占空比调整后,母线电流采样开始于母线电流波形稳定之后,结束于下一次开关狀态变化之前,以保证重构相电流的质量。
5结论
针对三相电压源型PWM逆变器中,制约相电流重构性能的两点主要因素:母线谐振电流和复杂的矢量重构算法。本文对谐振电流的成因做了细致的分析,并提出了一种能有效减少母线谐振电流的π型缓冲电路。提出了一种基于线电压调制方法的占空比调整策略。搭建了相电流重构实验平台,对缓冲电路的效果和调制算法进行了验证,得出了如下结论:
1)与现有基于矢量重构的相电流重构方法相比,基于线电压调制的调整策略具有运算量小,占用存储资源小,适合DSP芯片运行等优点。
2)对影响母线电流成分主要因素的分析表明,缓冲电路中的LC谐振效应对提取出的相电流的质量有决定性的影响,是从硬件电路角度制约相电流重构性能的主要因素。
3)所提出π型缓冲电路可以有效的缩短开关状态切换时的电流振荡时间,降低母线电流稳定时间,进而提高母线电流的采样质量。
参 考 文 献:
[1]赵文祥,程明,朱孝勇,等.驱动用微特电机及其控制系统的可靠性技术研究综述[J].电工技术学报,2007,22(4):38.
ZHAO Wenxiang, CHENG Ming, ZHU Xiaoyong,et al.Anoverview of reliability of drive system for small and special electric machines[J]. Transactions of China Electrotechnical Society,2007,22(4):38.
[2]朱显辉,师楠,田德文,等.PWM驱动电机可靠性研究发展及展望[J]. 哈尔滨理工大学学报,2014,19(04):22.
ZHU Xianhui, SHI Nan, TIAN Dewen, et al. The development and prospect of reliability research on PWMdriving motor[J]. Journal of Harbin University of Science and Technology, 2014,19(04):22.
[3]郝振洋,胡育文,黄文新,等.永磁容错电机最优电流直接控制策略[J].中国电机工程学报,2011,31(6):46.
HAO Zhenyang,HU Yuwen,HUANG Wenxin,et al.Optimal current direct control strategy for fault tolerant permanent magnet motor[J].Proceedings of the CSEE,2011,31(6):46.
[4]吴一丰,邓智泉,王宇,等.六相永磁容错磁通切换电机及其单相故障的容错控制[J].电工技术学报,2013,28(3):71.
WU Yifeng,DENG Zhiquan,WANG Yu,et al.Sixphase faulttolerant flux switching permanent magnet motor and control strategy for singlephase fault condition[J].Transactions of China Electrotechnical Society,2013,28(3):71.
[5]赵耀,王慧贞,赵晓中,等.五相容错双凸极发电机单相短路故障分析[J].中国电机工程学报,2013,33(30):90.
ZHAO Yao, WANG Huizhen, ZHAO Xiaozhong, et al.Analysis on singlephase shortcircuit performances offivephase faulttolerant doubly salient electromagnetic generators[J].Proceedings of the CSEE,2013,33(30): 90.
[6]王伟,程明,张邦富,等.电流滞环型永磁同步电机驱动系统的相电流传感器容错控制[J].中国电机工程学报,2012,32(33):59.
WANG Wei, CHENG Ming, ZHANG Bangfu, et al.Fault tolerant control focusing on phase current sensors of permanent magnet synchronous machine drive systems based on hysteresis current control[J].Proceedings of the CSEE,2012,32(33):59.
[7]MORIMOTO S, SANADA M, TAKEDA Y. Highperformance currentsensorless drive for PMSM and SYNRM with on lylowresolution position sensor[J]. IEEE Transactions on Industry Applications,2003,39(3):792.
[8]KIM H,JAHNS T M.Phase current reconstruction for AC motor drives using a DC link single current sensor and measurement voltage vectors[J].IEEE Transactions on Power Electronics,2006,21(05):1413.
[9]YE Haizhong,EMADI A.A Sixphase current reconstruction scheme for dual traction inverters in hybrid electric vehicles with a single DClink current sensor[J].IEEE Transactions on Vehicular Technology,2014,63(07):3085.
[10]HA J I. Voltage injection method for threephase current reconstruction in PWM inverters using a single sensor[J].IEEE Transactions on Power Electronics,2009:24(03):767.
[11]XU Yongxiang, YAN Hao,ZOU Jibin, et al.Zero voltage vector sampling method for PMSM threephase current reconstruction using single current sensor[J].IEEE Transactions on Power Electronics,99:1.
[12]储剑波,胡育文,黄文新,等.一种变频器相电流采样重构技术[J].电工技术学报,2010,25(1):111.
CHU Jianbo, HU Yuwen, HUANG Wenxin, et al. Phase current sampling reconstruction for inverter[J]. Transactions of China Electrotechnical Society, 2010, 25(1):111.
[13]GU Yikun, NI Fenglei, YANG Dapeng,et al.Switchingstate phase shift method for threephasecurrent reconstruction with a single DClink current sensor[J]. IEEE Transactions on Industrial Electronics,2011,58(11);5186.
[14]陈材,裴雪军,陈宇,等.基于开关瞬态过程分析的大容量变换器杂散参数抽取方法[J].中国电机工程学报,2011,31(21):40.
CHEN Cai, PEI Xuejun, CHEN Yu, et al. A stray parameterextraction method for high power converters based onturnon/off transient analysis[J].Proceeding of the CSEE, 2011,31(21):40.
[15]马鸿雁,孙凯,魏庆,等. PWM逆变器相电流重构研究与误差分析[J].电工技术学报,2011,26(1):108.
MA Hongyan, SUN Kai, WEI Qing, et al. Phase current reconstruction method for PWM inverter and erroranalysis[J].Transactions of China Electrotechnical Society,2011,26(1):108.
[16]王伟,程明,张邦富,等.最小占空比追踪法及其在五相逆变器双三相电机系统中的应用[J].中国电机工程学报,2013,33(3):117.
WANG Wei, CHENG Ming, ZHANG Bangfu, et al.Minimumdutycycle point tracking method and its applications in anew system with one fiveleg inverter and two threephase machines[J]. Proceedings of the CSEE,2013,33(3):117.
[17]WANG Wei, CHENG Ming, ZHANG Bangfu,et al.A faulttolerant permanentmagnet traction module for subway applications[J].IEEE Transactions on Power Electronics,2014,29(04):1646.
(編辑:贾志超)第22卷第2期2018年2月电 机 与 控 制 学 报ElectricMachinesandControlVol22No2Feb.2018电机与控制学报第22卷第2期张元飞等:步进电机期望控制脉冲的无抖动输出方法
