欠驱动TORA振荡轨迹跟踪的模糊控制设计
2018-05-14刘传德高丙团郑功倍孙国兵
刘传德 高丙团 郑功倍 孙国兵

摘 要:欠驱动TORA(Translational oscillators with rotating actuator)传统控制目标是实现平衡点的稳定控制。针对系统的周期性振荡轨迹,研究实用的轨迹跟踪控制方案。通过分析TORA系统的动力学,得到平移小车的自然振荡周期,在此基础之上设计一种平移小车周期运动和旋转小球保持定值的动态轨迹。为实现系统动态轨迹的跟踪控制,基于系统状态变量的轨迹跟踪误差设计模糊控制系统;通过设计融合函数合并系统状态变量,将模糊控制器的输入数由4减少到2,再设计模糊控制规则,得到易于实现的模糊控制器。最后,仿真和实验结果验证了所提控制方案的有效性与实用性。
关键词:欠驱动;旋转激励平移振荡器;模糊控制;轨迹跟踪
中图分类号:TP 273
文献标志码:A
文章编号:1007-449X(2018)05-0117-06
Abstract: Conventional research work on underactuated TORA (Translational oscillator with rotational actuator) system mainly focused on stabilizing control of equilibrium points. A practical trajectory tracking control design scheme was proposed to steer periodic oscillating trajectories of TORA system. Based on the dynamics of TORA,the natural period of translational oscillation cart was derived,and then the dynamic periodic orbits were followed,namely,the translational oscillation cart oscillating periodically while the rotational proof mass being stabilized at the fixed angle. To track the designed trajectory successfully,tracking errors of systems state variables were employed as the inputs of fuzzy control system. And a fusion function was applied for inputting tracking errors such that the input number of the fuzzy controller decreases from 4 to 2. Consequently,the corresponding fuzzy rules were established and a practical fuzzy controller was achieved. Finally,simulation results and experimental results validate efficiency and practicability of the proposed control scheme.
Keywords:underactuated; translational oscillators with rotating actuator; fuzzy control; trajectory tracking
0 引 言
具有旋轉激励的平移振荡器[1](TORA)又称RTAC(Rotational/translational actuator),由一个未驱动的平移振荡小车和驱动的旋转小球组成,原本是Bupp等人[2]提出的双自旋航天器简化模型,现作为一种欠驱动基准系统,用来研究非线性系统的控制问题。与其他欠驱动系统类似[3-5],TORA系统的传统控制目标是实现平衡点的镇定[6-9]。然而,TORA系统平移振荡轨迹的设计及跟踪控制[10]的应用价值不容忽视,例如,欠驱动平移小车跟踪状态空间上给定的振荡运动轨迹是双自旋航天器姿态调整的主动进动过程的简化,因其振荡轨迹的跟踪控制复杂困难很少有学者实现。
虽然振荡运动的跟踪控制在全驱动系统中是成熟的研究领域,但在欠驱动系统中则研究较少并逐渐引起人们的关注[11]。早在1995年Chung等[12]研究了车摆系统(Pendulum)周期性轨迹跟踪控制。控制欠驱动基准系统的振荡运动通常需要确定目标周期性轨迹,并设计合适的控制方法维持该基准系统跟踪目标周期性轨迹[13-14]。针对二自由度欠驱动基准系统,Shiriaev等人[11]提出了通过构造系统虚约束的控制技术,设计并跟踪目标周期性轨迹,实现轨迹误差的镇定控制,并率先应用到Pendulum系统中[11,15];近来,高丙团等人[16]又将该控制技术成功地推广到TORA系统中,实现了平移小车周期性轨迹的镇定控制。但基于虚约束的轨迹跟踪控制技术的物理意义模糊不清,且设计过程相对复杂。以模糊理论为代表的智能控制[8]可克服上述依赖系统模型精度的非线性控制方法,通过专家经验设计易于实现的轨迹跟踪控制器。
本文针对TORA系统的周期性振荡轨迹,基于模糊控制设计并实现了系统的轨迹跟踪控制方案。与现有研究相比,本文的贡献在于:1)基于平移小车振荡的固有周期,设计了一种平移小车周期振荡、旋转小球保持定值的动态轨迹,更加简明直观;2)设计的轨迹跟踪的模糊控制系统中,采用融合函数减少了模糊控制器的输入量,有效降低了系统计算量,增强了控制方案的实用性;3)仿真分析的基础上进行了实验研究,证明了所提控制方法的有效性与实用性。
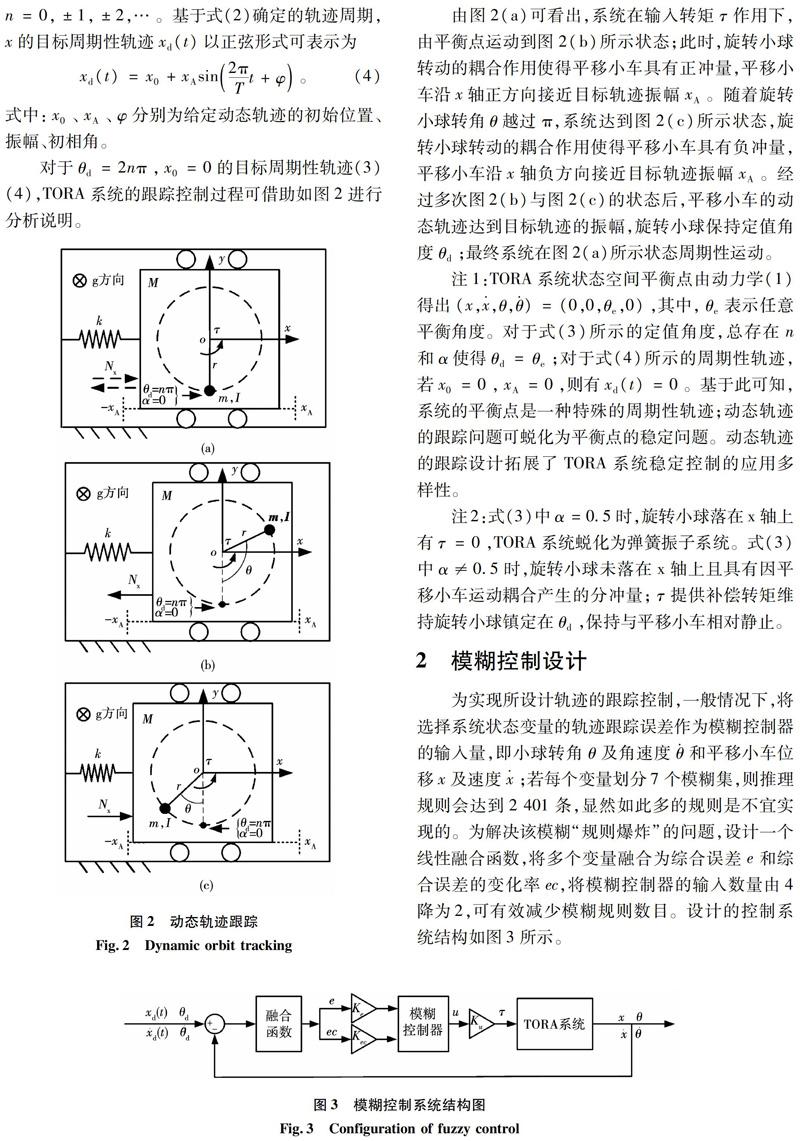
1 TORA系統的动态轨迹设计
如图1所示,TORA系统由在平面内作直线运动的小车和安装在其上的作圆周转动的小球组成。唯一的输入转矩τ通过轻质连杆用于驱动质量为m的小球运动,通过倔强系数为k的弹簧连接于固定物的质量为M的平移小车无直接驱动输入。系统的动力学模型[2]可表示为:
由于TORA系统需要通过唯一的控制输入转矩同时控制小车平动和小球转动,因此其是典型的欠驱动系统。传统的控制目标是通过控制设计实现小车和小球在平衡点处的稳定控制。本文研究其动态轨迹的跟踪控制。
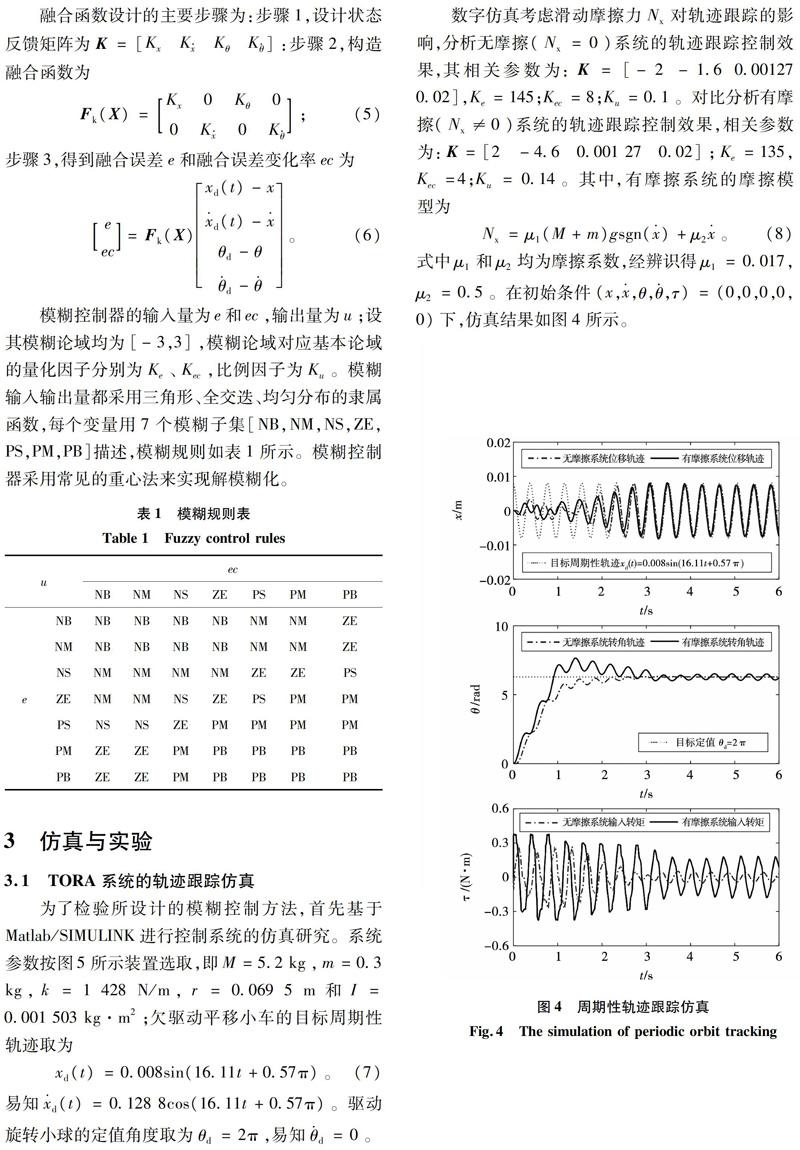
轨迹跟踪控制前提是自由度的动态轨迹设计。其中,驱动自由度θ的控制易于实现,欠驱动自由度x的振荡运动具有周期性,由动力学(1)可得其动态轨迹的周期为
3.2 TORA装置的轨迹跟踪实验
为了进一步说明所设计模糊控制方案的实用性,搭建TORA装置平台并对提出的动态轨迹进行跟踪实验。
如图5所示,TORA装置平台中采用直线轴承导轨实现未驱动平移小车的直线运动;旋转小球的运动通过MAXON直流盘式无刷电机驱动;控制器采用SIEMENS的S7-200型PLC(programmable logic controller);平移小车直线位移和旋转小球转角均由高分辨率旋转编码器进行检测;并基于VC++开发了PC上位机监控系统。
装置平台的目标周期性轨迹、初始状态和量化因子等参数与有摩擦系统的动态轨迹跟踪仿真一致,实验结果如图6所示。
从实验结果可以看出,4.6 s时装置平台的平移小车位移x跟踪至轨迹xd(t),同时装置平台的旋转小球转角θ达到定值θd并在其附近波动,证明了所设计控制方案的实用性。需要说明的是,实验结果中平移小车位移x跟踪xd(t)后并非完全吻合,这是由于驱动执行机构中的未建模动态和扰动导致的驱动小球控制误差,驱动小球的控制误差通过耦合导致小车位置的跟踪误差。
4 结 论
本文将欠驱动TORA系统的控制目标由传统的平衡点镇定控制推广到动态轨迹跟踪控制,拓展了稳定控制的应用多样性。设计了一种平移小车周期运动、旋转小球保持定值的动态轨迹,在此基础之上提出了一种可实现周期性轨迹跟踪的模糊控制方法。数字仿真和实验证明了该方法的有效性与实用性。本文的研究结果对于一类欠驱动系统的轨迹跟踪控制设计具有借鉴意义。
参 考 文 献:
[1] 高丙团,孙国兵. TORA转子位置反馈的稳定控制方法[J]. 电机与控制学报,2010,14(8): 58.
GAO Bingtuan,SUN Guobing. Stabilization control method with rotor angle feedback for TORA system[J]. Electric Machines and Control,2010,14(8): 58.
[2] BUPP R T,BERNSTEIN D S,COPPOLA V T. A benchmark problem for nonlinear control design[J]. International Journal of Robust and Nonlinear Control,1998,8: 307.
[3] SHIRIAEV A,LUDVIGSEN H,EGELAND O,et al. On global properties of passivity based control of the inverted pendulum[J]. 1999,3: 2513.
[4] XIN Xin,YAMASAKI T. Energybased swingup control for a remotely driven acrobot: Theoretical and experimental results[J]. IEEE Transactions on Control Systems Technology,2012,20(4): 1048.
[5] SUN Ning,FANG Yongchun,CHEN He,et al. Adaptive nonlinear crane control with load hoisting/lowering and unknown parameters: design and experiments[J]. IEEE/ASME Transactions on Mechatronics,2015,20(5): 2107.
[6] GAO Bingtuan,XU Jing,ZHAO Jianguo,et al. Stabilizing control of an underactuated 2dimensional TORA with only rotor angle measurement[J]. Asian Journal of Control,2013,15(3): 1477.
[7] FABIO C. Output regulation for the TORA benchmark via rotational position feedback[J]. Automatica,2011,47(3): 584.
[8] XIA Deyin,CHAI Tianyou,WANG Liangyong. Fuzzy neuralnetwork friction compensationbased singularity avoidance energy swingup to nonequilibrium unstable position control of Pendubot[J]. IEEE Transactions on Control Systems Technology,2014,22(2): 690.
[9] LEE Chinghung,CHANG Shengkai. Experimental implementation of nonlinear TORA system and adaptive backstepping controller design[J]. Neural Computing Applications,2012,21(4):785.
[10] PETRES Z,BARANYI P,KORONDI P,et al. Trajectory tracking by tp model transformation: case study of a benchmark problem[J]. IEEE Transactions on Industrial Electronics,2007,54(3): 1654.
[11] SHIRIAEV A,PERRAM J W,CANUDASDEWIT C. Constructive tool for orbital stabilization of underactuated nonlinear systems: virtual constraints approach[J]. IEEE Transactions on Automatic Control,2005,50(8): 1164.
[12] CHUNG C C,HAUSER J. Nonlinear control of a swinging Pendulum[J]. Automatica,1995,31(6): 851.
[13] ZHANG Ancai,SHE Jinhua,LAI Xuzhi,et al. Motion planning and tracking control for an Acrobot based on a rewinding approach[J]. Automatica,2013,49(1): 278.
[14] KORKMAZ O,IDER S K,OZGOREN M K. Trajectory tracking control of an underactuated underwater vehicle redundant manipulator system[J]. Asian Journal of Control,2016,18(5): 1593.
[15] GREGORY J,OLIVARES A,STAFFETTI E. Energyoptimal trajectory planning for the Pendubot and the Acrobot[J]. Optimal Control Applications & Methods,2013,34(3): 275.
[16] GAO Bingtuan,LIU Chuande,CHENG Hongtai. Virtual constraints based control design of an inclined translational oscillator with rotational actuator system[J]. Shock and Vibration,2015,Article ID 769151: 1.
(編辑:张 楠)
