基于MYO的肌电假肢手控制中手势在线识别系统
2018-05-14王朋李传江井本成张崇明张自强
王朋 李传江 井本成 张崇明 张自强
摘要:
表面肌电(surface electromyography,sEMG)信号被广泛应用于临床诊断、康复工程和人机交互等领域中.针对目前控制肌电假肢手的电极成本高、电极佩戴困难以及操作灵活性差等问题,设计一种基于MYO的肌电假肢手手势在线识别系统.通过采集人体上肢前臂的表面肌电信号,在时域上分别提取5种特征值,利用反向传播(back propagation,BP)神经网络分类算法实现对8种手势动作意图的在线实时识别.实验结果证明,利用MYO进行手势识别可以获得较好的识别结果,该系统能够准确识别8种手部动作,平均在线识别率达到92%.
关键词:
表面肌电信号; MYO; 特征提取; BP神经网络; 在线识别
中图分类号: TP 273文献标志码: A文章编号: 1000-5137(2018)01-0043-06
Hand mode online recognition system of electromyography prosthetic
hand based on MYO
Wang Peng, Li Chuanjiang*, Jing Bencheng, Zhang Chongming, Zhang Ziqiang
(The College of Information,Mechanical and Electrical Engineering,Shanghai Normal University,Shanghai 200234,China)
Abstract:
Surface electromyography (sEMG) is widely used in clinical diagnosis,rehabilitation engineering and human-computer interaction,etc.Aming at the problems of high cost of electrodes to control electromyography prosthetic hands,the difficulty in electrodes wear and poor operation flexibility,a MYO-based hand mode online identification system of electromyography prosthetic hands is designed.By collecting the sEMG of the human upper-limb-forearm and extracting 5 characteristic values in the time domain,8 real-time gesture recognition strategies are realized through the back propagation neural network.Experimental results show that the MYO-based gesture recognition canproduce bettergesture recognition results.The system can accurately identify the eight kinds of hand movements,and the average online recognition rate reaches 92%.
Key words:
surface electromyography; MYO; feature extraction; BP neural network; online recognition
收稿日期: 2016-06-12
作者简介: 王朋(1991-),男,硕士研究生,主要从事智能假肢方面的研究.E-mail:526127005@qq.com
导师简介: 李传江(1978-),男,副教授,主要从事计算机自动检测与控制、智能测控仪表、先进控制理论及其应用等方面的研究.E-mail:licj@shnu.edu.cn
*通信作者
引用格式: 王朋,李传江,井本成,等.基于MYO的肌电假肢手控制中手势在线识别系统 [J].上海师范大学学报(自然科学版),2018,47(1):43-48.
Citation format: Wang P,Li C J,Jing B C,et al.Hand mode online recognition system of electromyography prosthetic hand based on MYO [J].Journal of Shanghai Normal University(Natural Sciences),2018,47(1):43-48.
0引言
表面肌电(surface electromyography,sEMG)信号是由神经、肌肉兴奋伴随产生的生物电信号,并在一定程度上反映了人类特定手势动作的意图[1].sEMG可以反映神经肌肉的特性,包含着丰富的有关人体肌肉活动的信息,是一种重要的假肢控制信号,广泛应用于康复工程,尤其是智能假肢手的控制中[2-4].
随着生物电信号的不断深入研究,在sEMG信号的手势动作识别研究方面,国内很多学者都取得了一定的成果.文献[5]设计了一套简易且识别率高的表面肌电采集与在线识别系统,此外还设计了训练范式,根据被测试的训练数据提取在线识别算法的参数,以提高识别准确率.文献[6]提出了一种基于微处理器(advanced RISC machines,ARM)的肌电假肢控制器设计方案,通过反向传播(BP)算法实现了对5种手掌姿势的在线实时识别.这些方法虽然效果好,但是应用到截肢患者的实际生活中,还存在著很多局限性,仍然需要深入研究.
sEMG信号作为可靠的信号源被广泛用于肌电假肢手的控制中,sEMG传感器的质量直接影响动作模式的识别率,从而影响假肢手的整体性能.高质量的传感器比较贵,如Biomatric和Delsys无线电极等,单个传感器的价格都在5 000元以上.国内的假肢厂家多采用自己制作的肌电传感器,但信号干扰较大,严重影响动作模式的识别精度.加拿大创业公司Thalmic Labs 推出的创新性MYO臂环,它可以佩戴在任何一条胳膊的肘关节上方,捕捉手臂肌肉运动时产生的生物电信号,通过低功率的蓝牙将信号传出,干扰小,信号质量好,佩戴方便,并且价格低廉.将其应用到假肢手的控制上是一个很好的选择.
为了降低假肢手安装的成本和提高假肢手的实用性,本文作者提出一套基于MYO臂环的肌电假肢控制在线识别系统,实现对手势动作的在线实时识别.
1信号采集
图1MYO穿戴位置
图2八种手势动作
采用MYO臂环采集sEMG信号,它有8个通道,每个通道等间距排列.将其佩戴于肘关节上方的位置(水平放置手臂,手掌心朝下,MYO臂环的标识与手掌心的方向相反),如图1所示.
作者采用了8种手部动作进行在线识别研究,通过提取手部动作时所产生的sEMG信号的特征向量,进行分类,为人机交互模式提供可靠的控制源.8种手势分别为:(1)手腕内翻(Wrist Flexion,WF),(2)手腕外翻(Wrist Extension,WE),(3)握拳(Hand Close,HC),(4)展拳(Hand Open,HO),(5)握圆球(Spherical Grasping,SG),(6)握圆柱 Cylindrical Grasping,CG),(7)三指抓(Tripodal Precision Grasping,TPG),(8)二指捏(Key Grasping,KG).各种手势动作如图2所示.
2软件系统设计
考虑到Visual Studio是基于Windows编程,与PC端有很好的兼容性,所以本设计的上位机部分使用VC++开发语言实现,与MYO臂环之间通过低功率的蓝牙来传送信号.软件部分主要包含sEMG信号实时采集、预处理、判断动作起止点、sEMG信号特征提取和在线识别等模块,其中模式识别所需的权值、阈值由BP神经网络离线训练得到,然后写入到系统中用于在线识别.手势动作识别的在线处理流程如图3所示.
图3手势动作识别的在线处理流程
2.1预处理
在上位机程序中,对MYO臂环实时采集到的sEMG信号先进行预处理,其目的主要是滤除噪声.虽然MYO臂环采集到的信号干扰较小,但是sEMG信号是一种微弱的生物电信号,易受干扰.本软件系统中用45~195 Hz 的带通滤波器,对sEMG信号进行预处理.
2.2动作起止点判断
动作起止点的判断方法有阈值法、神经网络法、移动平均法等[7].为了保证系统的实时性,对动作起止点的判断需要及时有效,所以采用阈值法.
对于MYO臂环的8个通道的sEMG信号,计算每个通道信号的某段数据采样点个数为N的时域特征绝对平均值(Mean Absolute Average,MAV)[8]:
MAVi=1N∑Nk=1x(k),i=1,2…I,(1)
其中,k为单个采样点,x(k)为每次采样的sEMG数据,i是MYO对应的单个通道,这里I=8.
将各路信号的MAV相加,通过设定的门限阈值来判断动作起止点.考虑到每个受试者的肌电信号特性不完全一样,在离线训练环节,通过对每个受试者采集到的样本数据进行分析,可以确定各自合适的阈值.
2.3特征提取
特征提取的目的是将不同手势动作尽可能区分,通过sEMG信号的某一特性数据来表示.相对于其他频域或时-频域特征,时域特征也可以获得相对较好的分类特性,且具有计算量少、获取迅速等优点,满足在线识别的实时性.因此,采用5个时域统计学特征作为分类标准,它们分别是平均绝对值(MAV)、过零点数(ZC)[9]、斜率变化数(SSC)、波形长度(WL)[9]和平均绝对值斜率(MAVS).
MAV如(1)式所示.
sgn(-xk×xk+1) and (xk-xk+1≥ε),(2)
其中,sgn(x)=1,x>0
0,其他,ε是给定一个大于0的阈值(取0.02).如果满足(2)式条件,则ZC值加1.
(xk-xk-1)×(xk-xk+1)≥δ,(3)
对于3个连续的采样点xk-1,xk,xk+1,给定一个大于0的阈值δ(取0.02).当满足(3)式条件时,SSC值加1.
WL为N个数据长度内波形的累积长度,可以同时估计波形幅值、频率和持续时间,计算公式为:
WL=∑Nk=1xk+1-xk.(4)
MAVS为两个相邻分析窗口内的MAV之差,其计算公式为:
MAVS=Mk-Mk-1.(5)
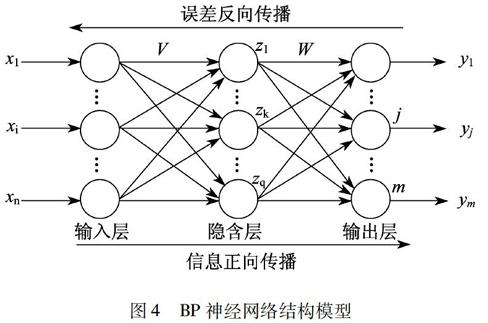
2.4分类器
图4BP神经网络结构模型
本上位机软件系统采用如图4所示的三层BP神经网络作为离线训练和在线识别的分类器,由输入层、隐含层和输出层组成.输入层为n(n=40)个神经元,对应MYO的8路sEMG信号的5个时域特征值,隐含层设置q(q=18)个神经元,输出层为m(m=8)个神经元,分别对应8种不同的手势动作.
通过Matlab训练,得到输入层到隐含层权值向量Vqn和阈值向量θq;隐含层到输出层的权值向量Wmq和阈值向量φk.然后将其复制到软件界面中权值和阈值相对应的、允许用户输入的文本框內,实现在线手势动作识别.
3实验及结果
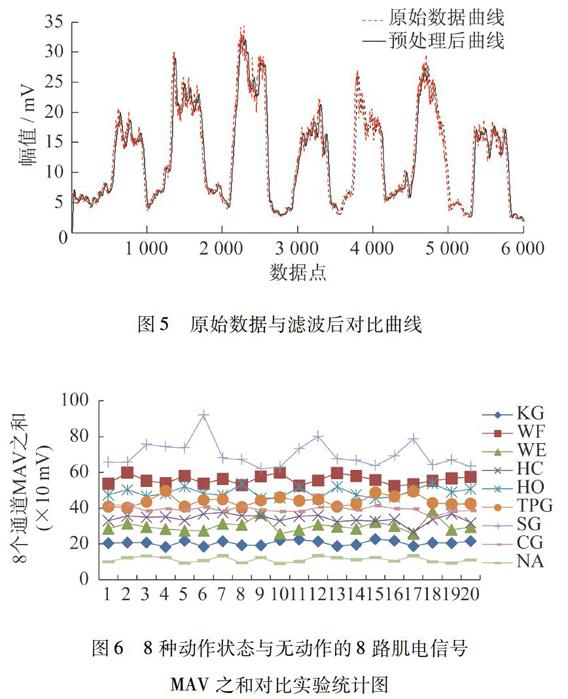
3.1预处理实验
图5原始数据与滤波后对比曲线
图68种动作状态与无动作的8路肌电信号
MAV之和对比实验统计图
由于sEMG信号复杂并且微弱,在采集过程中极易受到干扰,所以在本软件系统中采用了数字滤波技术,如图5所示.
从图5中可以看出,滤波之后的曲线是一条光滑的曲线,为判断动作起止点减少了不必要的干扰,从而能更准确地判断动作的起止点.
3.2动作起止点检测实验
为了找出不同受试者的合适阈值,对此,进行离线实验,在相同条件下做8种动作,各做20次,将8通道信号的MAV进行相加,然后与“无动作(No Action,NA)”相比较,如图6所示.从图6中可以看出,NA和其他8种动作有明显的区分界限.通过多次实验来确定“NA”和各种手势动作的MAV门限值.
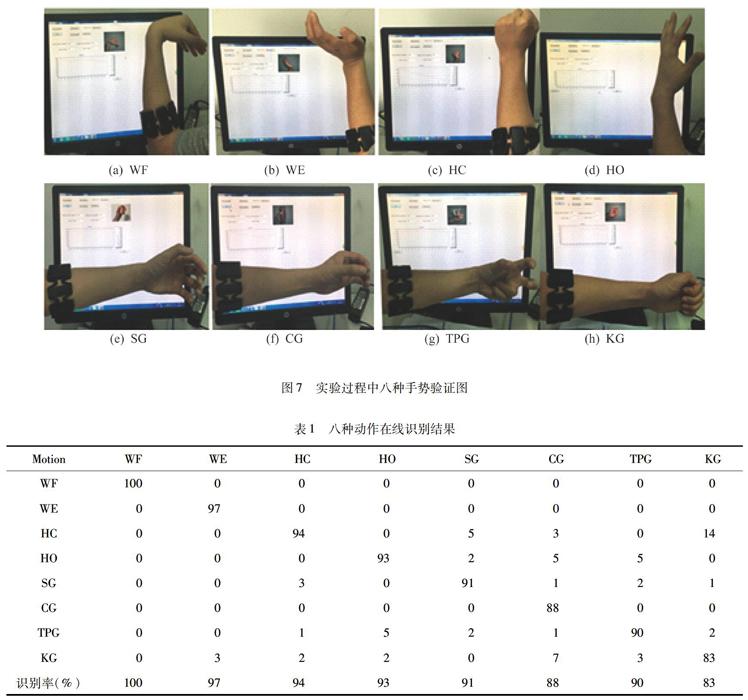
3.3动作模式在线识别实验
在Matlab中用BP神经网络训练得到的权值、阈值系数,写入上位机控制系统中,实现手勢动作在线识别.实验过程中,每个动作做100次,8种手势动作的一次动作验证图如图7所示,其中图7(d)没有对应的动作显示,主要是考虑到以后应用到假肢手,需要一个手势动作,来复位当前假肢手所做的动作,从而更好地控制假肢手.
每个动作结束后,统计上位机软件显示的对应正确动作次数以及误判动作次数,结果表明,总体在线识别率为92%,实验结果如表1所示.
图7实验过程中八种手势验证图
表1八种动作在线识别结果
由表1可知,8种动作平均识别率为92%.
以同样的方式,采集其余4人的原始sEMG,进行Matlab训练,得到新的权值、阈值系数,重新写入到上位机控制系统中,然后进行在线识别实验,同样做100次,4个人的识别率都保持在92%左右.
4总结与展望
本文作者采用5种时域特征:MAV、ZC、SSC、WL以及MAVS,设计了基于MYO的肌电假肢在线识别系统.通过BP神经网络实现了8种动作的在线识别,整体识别率达到92%,很好地满足了截肢患者对肌电假肢手的控制的精度要求.
接下来,将在截肢患者身上做实验,验证该系统的识别精度;此外,还将研究减少MYO臂环的通道个数以及降低特征维数对识别精度的影响,力争研究出更高精度的肌电假肢手实时控制系统.
参考文献:
[1]Liu H J,Young K Y.Upper-Limb EMG-Based robot motion governing using empirical mode decomposition and adaptive neural fuzzy inference system [J].Journal of Intelligent and Robotic Systems,2012,68(3-4):275-291.
[2]Oskoei M A,Hu H.Myoelectric control systems-Asurvey [J].Biomedical Signal Processing and Control,2007,2(4):275-294.
[3]赵京东,姜力,金明河,等.基于肌电信号的仿人型假手控制 [J].机械与电子,2006(8):54-56.
Zhao J D,Jiang L,Jin M H,et al.Prosthetic hand control based on EMG signals [J].Machinery & Electronics,2006(8):54-56.
[4]You B,Wang H L,Huang L.The system of sEMG recognition for prosthetic hand control [C].Strategic Technology (IFOST),Ulsan:IEEE,2010.
[5]何可人,孙伟,罗锦宏,等.表面肌电采集与在线识别系统 [J].计算机测量与控制,2016,24(3):241-243,247.
He K R,Sun W,Luo J H,et al.Collection and online identification system of sEMG [J].Computer Measurement & Control,2016,24(3):241-243,247.
[6]卜峰,李传江,陈佳佳,等.基于ARM的肌电假肢手控制器 [J].上海大学学报(自然科学版),2014,20(4):442-449.
Bu F,Li C J.Chen J J,et al.Design of electromyography prosthesis controller based on ARM [J].Journal of Shanghai University (Natural Science),2014,20(4):442-449.
[7]尹少华,杨基梅,梁政,等.基于递归量化分析的表面肌电特征提取和分析 [J].中国科学技术大学学报,2006,36(5):550-555.
Yin S H,Yang J M,Liang Zh et al.Recurrence quantification analysis based on surface EMG signal feature extraction and classification [J].Journal of University of Science and Technology of China,2006,36(5):550-555.
[8]Nadzri A AB A,Ahmad S A,Marhaban M H,et al.Characterization of surface electromyography using time domain features for determining hand motion and stages of contraction [J].Australasian Physical and Engineering Sciences in Medicine,2014,37(1):133-137.
[9]李媛媛,陈香,张旭,等.基于ART2神经网络的手势动作肌电信号识别 [J].中国科学技术大学学报,2010,40(8):90-92.
Li Y Y,Chen X,Zhang X,et al.Hand gesture SEMG signal recognition based on ART2 neutral network [J].Journal of University of Science and Technology of China,2010,40(8):90-92.
