三相电压源型PWM整流器非线性L2增益控制
2018-05-14王新刚顾臻
王新刚 顾臻

摘要:为降低模型参数分散和外部干扰对PWM整流器稳定控制的影响,解决非仿射结构带来的控制困难的问题,提出基于功率量测与扩展虚拟控制函数相结合的电压源型PWM整流器非线性L2增益控制方法。仿真结果表明:当输入电压幅值变化为1.5倍时,采用该控制方法后,可将传统的比例积分控制实现的整流输出电压稳定时间由0.15 s减小为0.10 s,并且交流输入交轴电流的谐波含量由原来的2A减小至0.2A之内。物理测试结果进一步验证所提方法的正确性,对于提高PWM整流器动态稳定控制能力具有一定参考意义。
关键词:电压源型PWM整流器;非线性L2增益控制;稳定控制;功率量测;干扰抑制
文献标志码:A 文章编号:1674-5124(2018)05-0113-05
0引言
电压源型PWM整流器由于具有单位功率因数、交流侧低谐波、能量双向流动及恒定直流电压控制等优势,所以在新能源、电力传动、电源设计等领域得到了广泛的应用。控制算法的改进是提高电压源型PWM整流器动态性能和大范围稳定性的重要途径之一。针对电压源型PWM整流器较强的非线性特征,近年来,许多学者采用H∞控制、滑模变结构控制、无源化设计、直接功率控制、自抗扰控制、反馈线性化等方法进行了非线性控制方法的研究和改进。
文献的电流内环采用求解Riccati方程的方法实现了线性二次型最优控制,电压外环采用H∞控制方法,通过设计加权函数,最终得到了直轴电流参考值,但该方法并没有对电流内环模型的参数不确定和外部干扰问题进行分析;文献中电压外环采用滑模变结构的方式设计了基于稳定工作点的控制方法,电流内环采用反馈线性化的方法进行了设计,但稳定点的求取是以PWM整流器精确模型为基础;文献采用无源化设计的方式,通过增加阻尼环节得到了无源控制器,该控制方法实现的基础依旧是不含外部干扰的PWM整流器矩阵形式EL模型;文献以电容储能作为外环,并给出了电流内环控制所需要的直轴电流参考值,文献基于瞬时功率和无差拍控制的原理,对基于功率的直接控制进行了分析,上述两种方法都是在控制过程中直接引入了功率量,提高了控制的速度;文献采用自抗扰控制的方法对电压外环控制进行了设计,形成了电流内环控制的电流跟踪值,降低了控制抖动。
以上方法很少分析由PWM整流器模型不确定性和外部干扰所引起的干扰抑制问题。L2增益控制可以有效抑制由模型参数不确定性和外部干扰引起的扰动,并能够保证干扰至控制输出增益小于设定值的同时,实现系统的鲁棒渐进稳定,从而为提高PWM整流器静态、暂态稳定控制能力提供一种直接有效的方法。因此,本文采用直接功率量测和扩展虚拟控制量的方法,提出了一种电压源型PWM整流器非线性L2增益控制方法。
1电压型三相PWM整流器模型不确定性分析
三相电压型PWM整流器拓扑结构如图1所示。图中ea、eb、ec为电源侧相电压,ia、ib、ic为交流侧各相电流,ua、ub、uc为整流器交流侧输入电压,udc为直流侧电压,un为中性点电压,iL为负载电流,L为滤波电感,R为系统线路附加电阻,C为直流侧稳压电容,令直流侧的负极为系统电压参考点。
考虑到C、L、R的参数分散性会造成模型不正定,在三相静止坐标系下,采用占空比描述的并联PWM
由于PWM整流器L2增益控制的目的是保证整流输出电压稳定,假定整流器输出的目标电压用udc*偏差化模型为
由于式(8)~式(10)表示的PWM整流器模型具有非常强的非线性和不确定性特征,且不具备下三角仿射系统结构,因此传统的反演设计方法不适用。
2三相PWM整流器的L2增益控制器设计渐进稳定。
PWM整流器的等效非线性模型式(8)~式(10)并不具备下三角结构的特点,因此,本文所提的L2增益控制新方法通过扩展构建虚拟控制量x2*,克服了非下三角结构带来的反演设计困难的难题,最终实现了系统的稳定控制。
由上述推导可得PWM整流器的非线性L2增益控制可以如图2所示的控制模型表示。
首先通过提出的非线性L2增益控制输入式(14)、式(17)求出等效模型式(8)、式(9)的控制输出,然后进一步求出三相PWM整流器交流侧指令电压信号y*d、u*q,其次通过坐标变换得到两相静止坐标系下的指令信号u*α、u*β,最后通过产生SVPWM信号原理对每相桥臂开关信号实时调节,从而实现输出直流电压的快速稳定、交流侧电流快速单位功率因数调整。
3仿真测试与结果分析
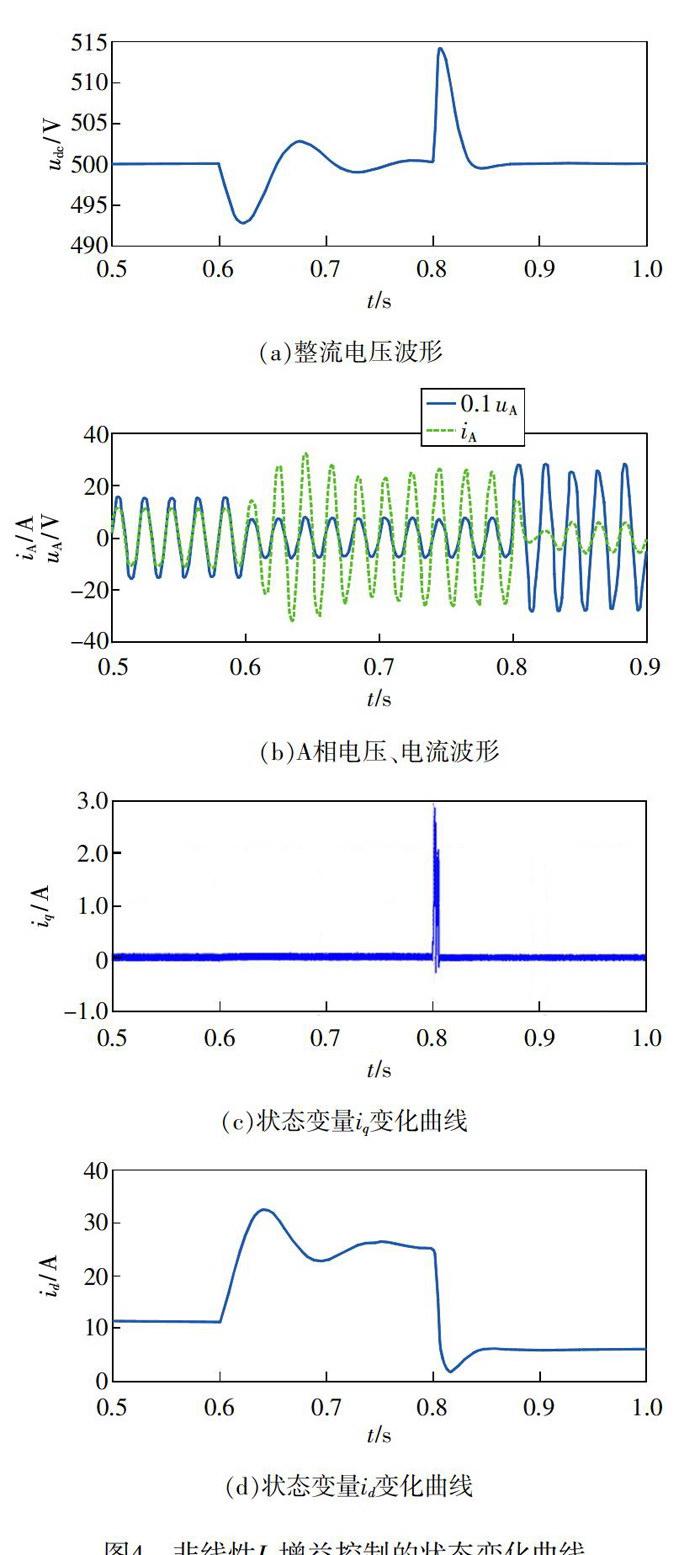
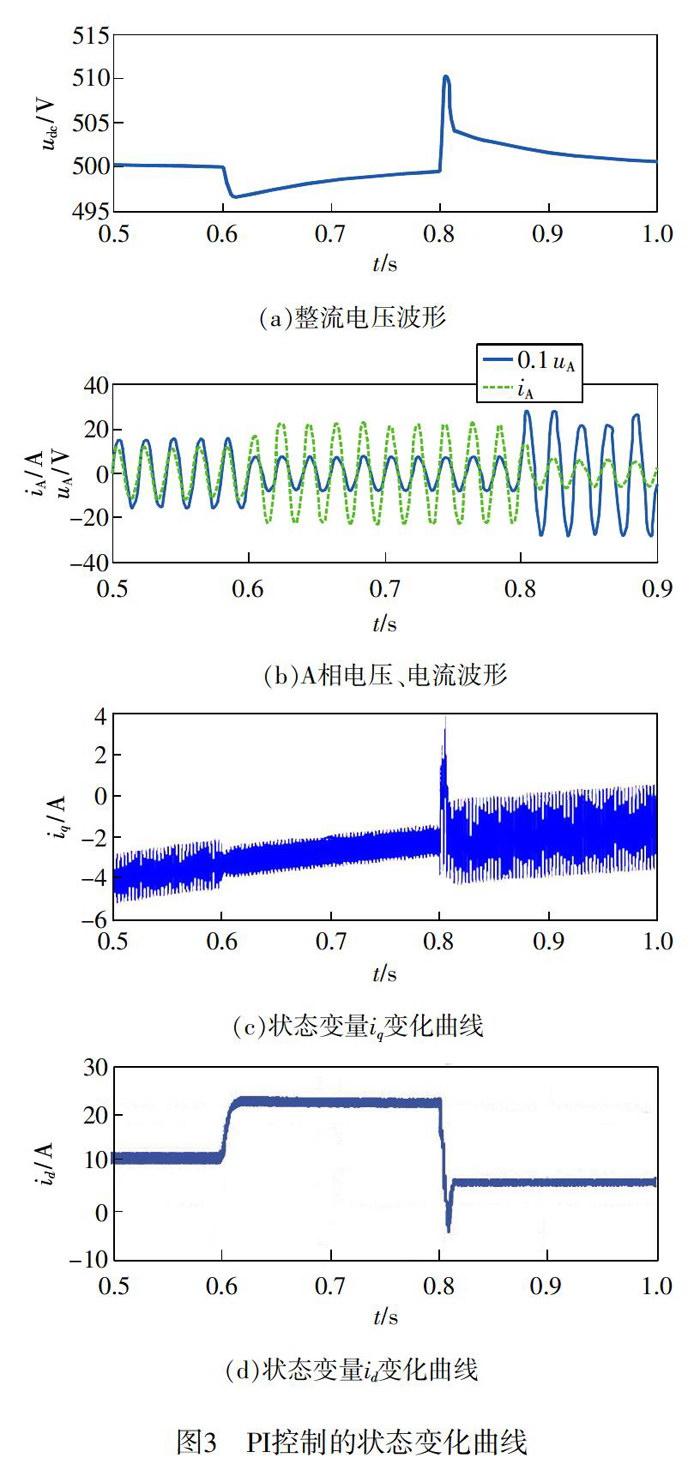
为测试非线性L2增益控制的控制性能,并与传统PI控制方式进行对比,在额定负载条件下,交流侧相电压幅值在0.6 s时突减至原幅值0.5倍时,且维持0.2s后,并在0.8 s时突增至原幅值的1.5倍,两种控制方式下系统的动态响应如图3、圖4所示。
采用非线性L2增益控制时,仿真参数:k1(|e1|)=e12;c1=5;f1(e2)=2|e2|+cose2;f2(e3)=1+2|e3|+0.5sine3;q1=0.4;q2=0.6;q3=0.4;γ=0.5;ε1、ε2和ε3均为白噪声(噪声功率分别为0.2和0.3)。
比较图3、图4可知:当在0.6s电压突降时,0.2 s后,PI控制不能使整流输出电压udc稳定,而非线性L2增益控制可以,并且调整速度较快:当在0.8 s电压突变时,PT控制依然不能使整流输出电压udc稳定,且电流的谐波含量明显,而非线性L2增益控制却可以很快使整流输出电压udc稳定,且电流的谐波含量非常小;相对于PI控制,非线性L2增益控制可使状态变量iq快速跟踪iq=0,进而更好地实现单位功率因数整流。
在搭建的实验环境中对双闭环PWM整流器特性进行了测试,测试波形如图5、图6所示。由图5可知,PWM整流器输入的交流电压、电流保持功率因数为1的状态,具有单位功率因数的特点,从而具有较高的效率。由图6可知,当负载突然减小时,输入整流器的交流电流幅值明显减小,同时整流电压经过较短的时间稳定在了额定值。测试实验进一步验证了所提方法的正确性。
4结束语
本文针对三相电压源型PWM整流器模型存在的参数不确定性和外部干扰特征,设计了一种L2性能准则下的镇定控制器。在分析电压源PWM整流器非线性模型的基础上,通过采用功率量测与扩展虚拟控制量的方法,解决了由非仿射结构带来的控制困难的难题。本文提出的L2控制方法以PWM整流器非线性模型为整体实施控制,充分保留了系统内部非线性耦合的特征,弥补了传统双环控制中存在的外环控制单纯依靠比例积分调整,而忽视非线性系图6负载突变时整流电压及交流输入电流波形统内部之间相互影响的不足。通过与传统的比例积分控制方法进行仿真对比发现,采用非线性L2控制方法更能够提高PWM整流器输出电压的稳定速度和单位功率因数电流跟踪速度,且可以明显降低PWM整流器输入交流电流的谐波。
(编辑:商丹丹)