非侵入式双芯线电流传感器的研制
2018-05-14张俊彭伟涂景怀程杰杨鹏吴瀚赵雪琳
张俊 彭伟 涂景怀 程杰 杨鹏 吴瀚 赵雪琳


摘要:采用需求响应电力监控系统管理终端用电量,可提高智能电网运行效率。电流传感器是监控系统的关键组成之一,但传统的单芯线电流传感器不适用于终端设备双芯线电流的非侵入式检测。该文提出一种非侵入式双芯线电流传感器,采用环电线的开气隙磁芯控制电流产生的磁场分布,通过4个磁阻传感器分别测量4处气隙磁场,共同求解双芯线电流以及双芯线绕中轴旋转角度。使用时传感器扣合在被监测双芯线外包层,无需任何对准过程,可实现任意轮廓双芯线电流的非侵入式检测。实验表明:该传感器在0-20 A量程内的非线性度为±1.5%,电流测量误差不超过±1.8%。
关键词:非侵入式电流传感器;双芯线;开气隙磁芯;磁阻传感器
文献标志码:A 文章编号:1674-5124(2018)05-0071-06
0引言
采用需求响应电力监控系统管理终端用电量,可提高智能电网运行效率,电线电流传感器是监控系统的关键组成之一。测量电流产生的磁场是电流检测的常用手段,然而家用或商用终端设备普遍由双芯线供电,其相线与零线中电流的大小相等、方向相反。各种单芯线电流传感器,如电流互感器、Rogowski线圈、有磁芯霍尔电流传感器、无磁芯霍尔传感器阵列、法拉第磁光效应电流传感器等,均不适用于双芯线电流的非侵入式检测。由于双芯线磁场分布不均匀,Leland等设计的两种传感器中的磁体或线圈必须位于电线双芯的中线上并与双芯保持确定的距离,否则灵敏度将显著降低甚至无法感应,因此传感器需要复杂的对准过程,测量精度受安裝位置影响较大,仅适用于扁平轮廓双芯线电流的非侵入式检测。
针对现有非侵入电流传感器在双芯线电流检测中存在的问题,本文提出一种非侵入式双芯线电流传感器,采用环电线的开气隙磁芯控制双芯线磁场分布,通过磁阻传感器测量磁芯4处气隙磁场,共同求解双芯线绕中轴旋转角度以及双芯线电流,确保传感器在任意的双芯线旋转角度下均保持较高的测量精度,从而实现任意轮廓双芯线电流的非侵入式检测。
1传感器结构
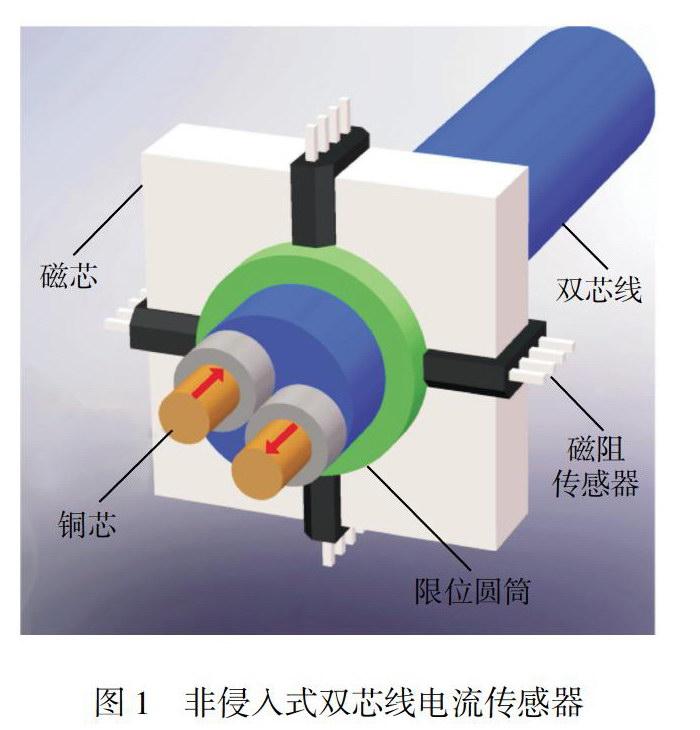
非侵入式双芯线电流传感器由开气隙磁芯和磁芯气隙中的4个磁阻传感器组成,结构如图1所示。磁芯与磁阻传感器绕磁芯通孔中轴旋转90°对称,限位圆筒使双芯线与磁芯通孔尽量同轴。当双芯线与磁芯通孔同轴时,相互垂直气隙中的磁场分别与双芯线绕中轴旋转角度的正弦值及余弦值相关,可共同求解双芯线电流及双芯线绕中轴旋转角度:当双芯线中轴偏离磁芯通孔中轴时,相互对称气隙中的磁场以几乎相反的趋势变化,可近似求解双芯线与磁芯通孔同轴时的气隙磁场。
2传感原理
传感器以双芯线与磁芯通孔同轴时的气隙磁场作为被测量,采用对称的磁芯结构消除双芯线中轴位置偏移引起的测量误差,通过磁阻传感器的4路输出信号共同求解双芯线电流以及双芯线绕中轴旋转角度。
2.1双芯线与磁芯通孔同轴时的气隙磁场
磁芯与电线双芯的尺寸如图2(a)所示,坐标原点位于通孔中心,双芯线中心坐标为(△x,△y),气隙宽度和高度分别为d与h1,通孔半径为r3,电线铜芯的圆心距离为2r0,θ是Y轴与铜芯圆心连线之间最小的夹角(0°≤θ≤90°)。X轴的上侧与下侧分别为气隙1与气隙3,Y轴的右侧与左侧分别为气隙2与气隙4,将磁芯磁场按其经过的气隙进行分解,路径如图2(b)所示。
设双芯线与磁芯通孔同轴,(△x,△y)=(0,0)时,气隙n中心位置的磁感应强度幅值为Bsn。根据磁芯旋转90°对称性,有Bs1=Bs3、Bs2=Bs4。
首先分析Bs1,假设电荷在铜芯截面均匀分布,将铜芯截面视为半径无穷小的点。由于磁芯绕通孔中轴旋转90°对称,因此气隙1与气隙2的磁场分量在通孔中的方向相互垂直,求解Bs1时可将铜芯截面投影到Y轴上,使磁场沿X轴对称。设气隙磁场均匀分布,通孔中Y轴上的磁感应强度幅值为By(y),忽略气隙漏磁,有:
取Y正半轴上y0点的微元dy0,对经过dy0且截面宽度趋于零的磁路进行分析,由于磁场总是倾向于从磁阻最小的路径通过,因此假设该磁路在通孔和气隙1中的路径是经过dy0的最短路径,如图2(a)中虚线所示,该磁路在通孔和气隙1中的长度Ly(y0)约为
假设该磁路在通孔和气隙1中的平均磁感应强度为By(y0),磁芯相对磁导率μr>1,根据磁路定理可知:
上式说明测量Bs1(或者Bs3)与Bs2(或者Bs4)可实现电流检测,因此传感器以Bsn作为气隙磁场被测量。但实际的双芯线与磁芯通孔很难同轴,需要继续分析双芯线中轴位置偏移时的气隙磁场。
2.2双芯线中轴位置偏移时的气隙磁场
设双芯线与磁芯通孔不同轴,即(△x,△y)≠(0,0)时,气隙n中心位置的磁感应强度幅值为Bn。Bn由磁阻传感器测得,是Bsn的测量值。由于磁芯具有旋转90°对称性,下面以B1、B3为例进行分析。
B1、B3的求解过程与Bs1基本相同。由于铜芯截面在y轴上的投影偏移至△y点,求解B1时将式(1)的积分上限与下限分别修改为r0cosθ+△y与△y,求解B3时将式(1)的积分上限与下限分别修改为r0cosθ-△y与-△y,有:
将式(13)、式(14)计算出的B13、B24测量值代入式(16),可以共同求解,Ip与θ。磁芯的气隙漏磁由其几何参数决定,因此式(16)适用于具有相同磁芯结构的任意电流传感器。由于实际的气隙磁场分布不均匀,为了避免磁阻传感器安装位置偏移带来的测量误差,需要为每一个电流传感器单独标定β13与β24。
4实验与讨论
实验选取江苏多维科技有限公司生产的隧道磁阻传感器TMR501,其磁场感应方向垂直于芯片表面,外部尺寸为5.2mm×3.6mm×1.7mm,出厂灵敏度范围(3v供电)在7.5~11.25mV/mT之间。为进一步确定磁阻传感器灵敏度,将0.1 mT精度的高斯计与磁阻传感器共同放置于水磁体产生的均匀磁场中,标定出磁阻传感器在±10 mT量程内的灵敏度结果如表1所示。传感器磁芯采用相对磁导率μr=5 000的铁基非晶材料,設磁芯沿电流方向的长度为m,磁芯的几何参数为:h1=1.8mm,d=3mm,m=4mm,r3=5mm。磁阻传感器在磁芯气隙中的安装位置如图8所示。
传感器测试系统中,双芯线铜芯截面积为4 mm2,铜芯圆心距离2ro=3.7 mm,限位圆筒外径为9.6mm。4个磁阻传感器均由3v直流稳压源供电,磁阻传感器输出的毫伏级电压信号经差分放大电路200倍放大后,输入示波器进行测量。
拟合实验中传感器角度固定、双芯线绕中轴旋转,电流有效值/1=19.8 A。将双芯线按同一方向旋转360°,每隔2°记录一次Un,共得到180组B13、B24测量值,其中每4组测量值对直于同一个θ(θ≠0°或90°),取这4组数据的平均值作为正弦拟合用的B13、B24测量值,结果如图9所示。
拟合实验中任意θ下B13或B24的4个测量值相对于图9中平均测量值的偏差在±0.3%以内。以图中的平均测量值作为曰。真值,得到△Bsn/Bsn变化范围见表2,B13、B24的测量误差相比Bsn降低了一个数量级。
B13、B24的测量值拟合曲线如图9所示,实验测得β13=1.124 mT,卢24=1.161 mT,正弦拟合系数为
为评估传感器的测量误差,分别在10个不同θ(θ=0°,10°,20°,30°,40°,50°,60°,70°,80°,90°)条件下测量0~20A范围内的电流,由于磁芯绕通孔中轴旋转90°对称,因此仅在图2(a)所示的一个象限内进行测试。实验测得200B组B132、B242测量值,其中θ=30°条件下的传感器输入输出特性如图10所示。将B13、B24的测量值代入式(16)求解Ip,得到传感器测量误差如图11所示。传感器在0~20A量程内的测量误差不超过±1.8%,满量程非线性度为±1.5%。
5结束语
非侵入式双芯线电流传感器采用环电线的开气隙磁芯控制磁场分布,通过磁阻传感器测量4处气隙磁场,共同求解双芯线电流以及双芯线绕轴旋转角度,同时显著减小双芯线与磁芯通孔不同轴引起的测量误差。使用时传感器扣合在双芯线外包层,无需对准或固定传感器位置,即可实现任意轮廓双芯线电流的非侵入式检测。实验表明该传感器在0~20A量程内的非线性度为±1.5%,测量误差不超过±1.8%。传感器体积小巧、安装方便,可监测每一个终端设备的用电量,为智能电网需求侧管理提供有效的技术支撑。
(编辑:徐柳)