基于多帧光融合的高速摄像机宽动态研究
2018-05-14罗启宏
罗启宏
【摘要】人眼在视觉上具有摄像机不能比拟的动态范围,无论所关心的细节所处何种亮度区域,它总能获得所关注的事物具体信息,但这仅限于运动速度较低的物体。随着科学技术的不断向前发展,机器视觉在对于高速運动物体信息的捕获上以及所呈现的实际景物的动态范围已经有超越人眼的趋势。不同帧之间不同的曝光时间能够最大程度地获取场景细节,然后将他们彼此融合,获取高动态范围的数据图像,同时高帧数摄像机保证了融合后的视频的帧数基本要求(>=25fps)。本文介绍了一种实现高速摄像机宽动态图像融合算法。
【关键词】高速摄像机;宽动态;图像处理
机器视觉通常是通过机器视觉产品(即摄像机)将被摄取目标转换成图像信号然后显示出来,所呈现出来的景物和动态范围完全由该帧的曝光时间决定,曝光时间越长,图像低亮区域的景物表现的层次细节越丰富,反之,高亮区域的景物表现的层次细节丰富。高速传感器一般是指120fps以上的传感器,通过设定多组曝光值,将不同曝光时间获取的数据进行图像进行融合处理,同时获取低亮和高亮细节,使原本不具备宽动态处理能力的芯片能实现宽动态效果。
图像融合算法在图像处理领域有着广泛的应用。很多专家对此都有深入的研究并且获得了一定的研究成果,比如基于金字塔分解式多曝光图像融合算法,以权重融合为基础,是一种多尺度、多分辨率的融合策略;本文介绍了高速传感器宽动态功能实现流程以及总结了TomMertens、JanKautz和FrankVanReeth在《ExporeFusion》一文的图像分层融合的方法以及融合效果。
一、高速摄像机宽动态实现流程以及图像融合算法
(一)高速摄像机宽动态数据流
高速摄像机设定多组曝光参数(120帧为例,设定四组曝光值,分别为S1、S2、L1、L2,其中S1和S2为两组短曝光值,L1和L2为两组长曝光值)交替曝光,每个循环4帧数据合成一帧宽动态数据H,出30帧宽动态数据,如图1所示。
N是指由N副图像(本文中N=4),k为第k个输入图像(每个周期4幅图中的序号),i,j为融合像素点位置。基本融合示意图与流程如下。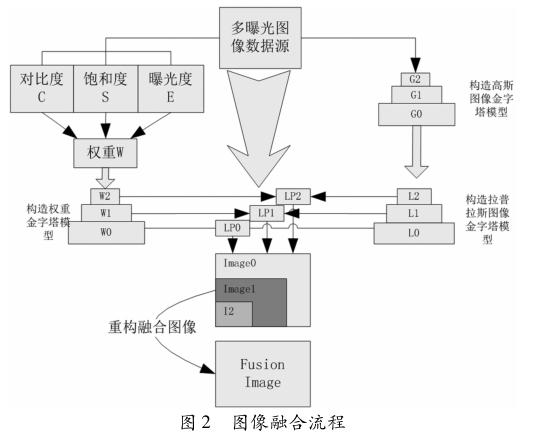
三、图像融合结果仿真
通过matlab仿真工具对本算法进行了仿真,所测结果如图3所示。
在上述仿真结果当中,每组的前三张图片为同一场景不同曝光参数的三帧图像数据,第四幅为合成后摄像机的实际输出图像。从实验结果中我们可以得出,该算法融合效果好,色彩和细节还原度高,不具备宽动态功能的芯片也能出宽动态效果。(身份证号:430524198805041171)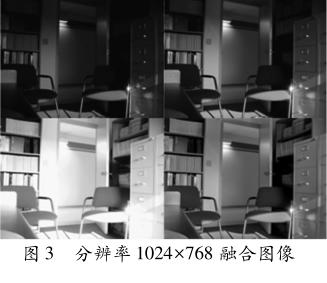
参考文献
[1]GoshtasbyAA.Fusionofmulti-exposureimages[J].Image andVisionComputing,2005,23(06):611~618.
[2]贵喜,杨万海.基于多尺度对比度塔的图像融合方法及性能评价[J].光学学报,2001,21(11):1336~1342.
