基于BLE技术的可穿戴组合式人体姿态检测系统
2018-05-13刘小彬邹远文李晋川黄学进
刘小彬,王 璐,邹远文,李晋川,黄学进
(1.四川大学 建筑与环境学院,四川 成都 610065;2.四川大学 材料科学与工程学院,四川 成都 610065)
大学生中多数患有圆肩、颈椎过度前曲、驼背、耸肩或塌肩及腰椎过度前曲等姿态问题,而平常生活中不规范的坐、立和行走姿态是造成不良身体姿态的最主要原因[1]。随着社会老龄化问题的出现,无人监护的居家老人频发意外跌倒事故,未及时抢救可导致虚弱、疾病甚至死亡[2-4],因此姿态检测对各类人群都有重要的临床和实际意义。
根据检测方式,人体姿态检测主要分为非穿戴式检测和穿戴式检测[5]。文献[6]中提出了一种基于深度图像梯度特征的人体姿态识别,利用图像中深度信息计算出水平和垂直方向的梯度值,从而提取特征值,再利用分类器进行分类,但仅能够对静态图片进行姿态识别,无法应用在实际生活中。文献[7]中提出了利用视频识别对人体姿态进行识别,采用基于Hu不变矩特征的提取算法提取视频中的关键帧,再利用分类模型进行分类,但分类模型所需训练数据庞大,且受环境影响大,如光照、遮挡物等。文献[7-8]中在低频电磁场中,采用固定在被测对象上的磁接收器作为传感器,检测磁场的变化信息,然后利用发射信号和感应信号之间的耦合关系确定被测对象的姿态,但该实验必须在低频电磁场中进行,且易受到电磁干扰。此外,Logitech、SAC等公司都生产超声波运动捕捉设备,然而这类设备实时性较差,且受环境影响大。上述人体姿态检测均为非穿戴式检测,除了自身存在的问题,还存在检测范围有限、设备限制大等缺点。
相对于非穿戴式检测,穿戴式检测具有检测范围所受限制小,且不受光照、背景等外部环境干扰的特点[9]。文献[9-10]中基于惯性元件对老年人进行实时的摔倒检测,当老年人摔倒时开启安全气囊,减少损伤,但动作分类有限,不能用于其他运动或姿态的捕捉。文献[11]利用手机内置的加速度传感器得到测试者的姿态信息,再利用分类器对姿态进行分类,其缺点在于必须使用实验型号的手机。
本文提出了一种基于BLE技术的可穿戴组合式人体检测装置,通过数字式的加速度传感器检测出姿态信息,最后显示在平板电脑上。本装置具有受环境干扰小、灵活、可组装、低功耗、携带方便及可检测多种姿态等特点,可应用于运动康复、姿态矫正、跌倒检测和计步等领域。
1 系统结构设计
1.1 人体姿态检测原理
本文主要采用三轴加速度传感器来检测人体姿态,如图1所示。

图1 传感器及人体姿态检测示意图
图1(a)为加速度传感器三轴受力示意图,αg,βg,γg分别为重力加速度g与x,y,z轴夹角。当加速度传感器不受外力作用时,只会检测到重力加速度。假设重力加速度为g,则传感器在各个方向应该满足:

式中,ax、ay、az分别为重力加速度g在x,y,z轴上的分量。通过式(1)~式(3)可计算出:

对人体竖直站立姿态建立自然坐标系O-x0y0z0,取人体冠状面法相方向为x0轴正方向,矢状面法相方向为y0轴正方向,水平面法相方向向下为z0正方向。此时,z0与重力加速度g的方向一致,于是,当将加速度传感器穿戴于静止人体的某个部位,便可检测出该部位相对于重力加速度方向的夹角,从而确定该部位的姿态,如图1(b)所示。而对于运动中的人体姿态检测,可通过对运动中的加速度数据进行滤波和消振处理而得到姿态信息。
1.2 计步原理
人体在水平步行运动中,垂直和前进两个方向上的加速度会呈现周期性变化,如图2所示。在步行收脚的动作中,由于重心向上单只脚触地,垂直方向加速度是呈正向增加的趋势,之后继续向前,重心下移两脚触底,加速度相反。水平加速度在收脚时减小,在迈步时增加。反映到图表中,可以看到在步行运动中,垂直和前进产生的加速度与时间大致为一个正弦曲线,而且在某点有一个峰值,其中垂直方向的加速度变化最大,通过对轨迹的峰值进行检测计算和加速度阈值决策,即可实时计算用户运动的步数,还可依此进一步估算用户步行距离,如图2所示。

图2 实测人体行走时ax波形图
1.3 硬件设计
本系统硬件主要由移动客户端和人体姿态检测/计步模块两部分组成,而人体姿态检测/计步模块由加速度传感器、微处理器和蓝牙组成。加速度传感器选用了ADXL345,该芯片是一款小而薄的超低功耗三轴加速度计,分辨率高(13 bit),测量范围达±16g。数字输出数据为16 bit二进制补码格式,其高分辨率(3.9 mg/LSB),能够检测到小于1.0°的倾斜角变化,并可在所有测量范围内保持此比例系数[12]。另外选用了 TI公司CC2541蓝牙4.0低功耗片上系统,该系统将微处理器和蓝牙集成在一起,既满足便携式设备小型化要求,也可将采集到的加速度信号发送至移动客户端。此外,CC2541可在不同模式间进行转换,且转换时间较短,能耗低,可延长设备一次充电后的使用时间,使便携式设备的使用更方便[13]。
1.4 可配置工作模式设计
由于每个人体姿态检测/计步模块的硬件结构完全相同,只是因要实现不同功能而穿戴于不同人体部位并运行相应的处理程序,所以为了使用方便,不对模块进行特有功能的标识,本文采用了可配置工作模式的软件设计,即将所有的功能(头部震荡检测、跌倒检测、颈椎弯曲检测、脊柱弯曲检测、计步等)在每个模块上都实现,用户只需在使用系统前根据每个模块所佩戴的部位和想要实现的功能通过移动客户将其配置成对应工作模式即可。
1.5 低功耗设计与电源监测
姿态检测/计步模块选用TI公司CC2541蓝牙4.0低功耗片上系统作为处理器,该系统包含3种供电模式。如表1所示,通过将部分功能块关闭的方式以降低系统的功耗。设计程序使CC2541在空闲时处于供电模式2,而在数据采集和计算时处于供电模式1,从而降低了姿态检测/计步模块功耗,延长工作时长。当不使用模块又不想拔出电池时,便可通过外部按钮触发CC2541进入供电模式3(超低功耗模式),待使用时采用同样方法唤醒模块。
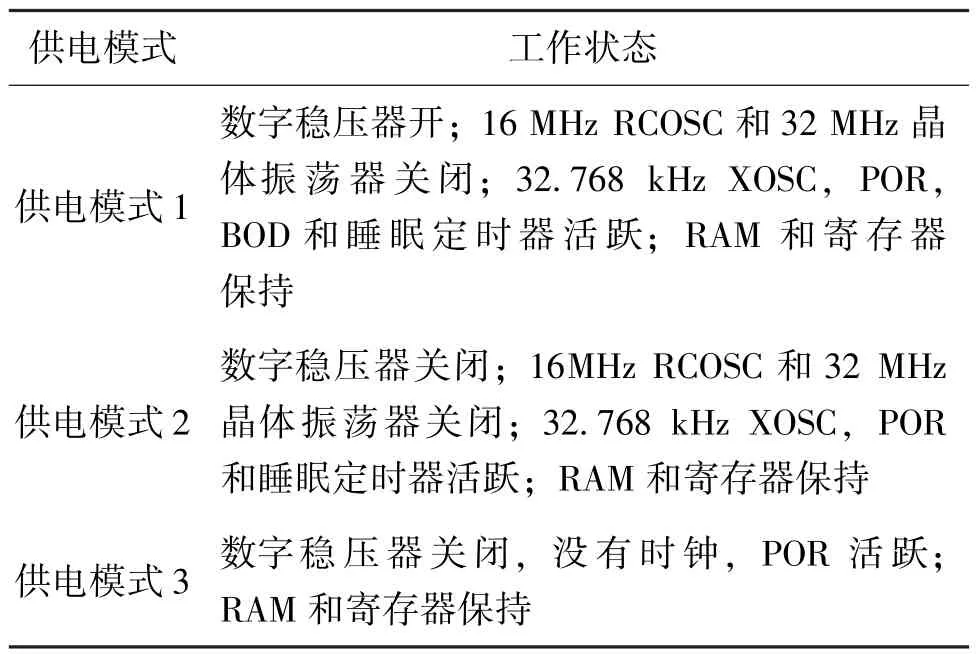
表1 CC2541三种供电模式
为了保证姿态检测/计步模块处于正常工作状态,增加了模块的电源监测功能。将供电电源电压VDD信号直接作为CC2541的A/D输入信号,利用CC2541的内部参考电压便可计算出VDD值,然后将该值发送至移动终端设备作为对模块电量的评估值,当监测到的VDD值低于模块最低供电要求时便给予报警信号并将模块切换至供电模式3。
2 系统算法设计
2.1 基于低通滤波的姿态角度计算
本文的姿态检测主要是检测人体某个部位(如头部、背部、腰部)长时间保持同一个状态(相对于重力加速度方向的角度),而这个状态为非正常人体姿态,且对人体的身体健康有严重的危害时,则通过移动终端给用户提供报警信号。为减小或消除人体正常活动对所穿戴的加速度传感器检测值的影响,本文基于低通滤波来计算姿态角度值,并对一定时间内的角度值进行计算和分析评价该段时间内人体姿态是否满足正常人体姿态要求。
为过滤掉加速度的突变值和运动产生的高频信息,本文采用了低通滤波算法对计算的角度数据进行滤波。将普通硬件RC低通滤波器的微分方程用差分方程来表示,便可采用软件算法来模拟硬件滤波的功能,经推导,低通滤波算法如下:

式中:Xn为本次采样值;Yn-1为上次的滤波输出值;a为滤波系数,其值通常远小于1;Yn为本次滤波的输出值。
通过大量实验便可确定一个较为合适的a系数值,从而对角度数据进行低通滤波得到一段时间内角度值,最后再求出这段时间角度值的平均值作为这段时间平均姿态角度来评估人体姿态是否满足要求。
2.2 跌倒时脑部震荡检测
通过将人体姿态检测/计步模块穿戴于腰部,并将加速度传感器的z轴垂直于人体,则计算出的重力加速度g与z轴之间的夹角γg便是人体相对于重力加速度g的倾斜角度,当γg大于45°角时便可认为此时人体处于跌倒状态。与此同时,在人体头部穿戴一块人体姿态检测/计步模块采集检测到跌倒前后一段时间的加速度值,并通过BLE发送至移动终端设备,计算出产生最大撞击的方向和力度 (以加速度产生方向和最大加速度值表达)作为对头部碰撞严重程度的评估信息。
2.3 基于动态阈值的计步算法
1)算法描述。
将人体姿态检测/计步模块穿戴于腿部,便可以检测到如图2所示的角度信号,再将数据进行数字平滑滤波后得到如图3所示的波形。水平线为设定的阈值线,当采集的数据signal大于Threshold时,标记为T1时刻,并设pulse=true,之后当signal小于Threshold时记为T2,设pulse=false,再当signal大于Threshold时记为T3,再次设pulse=true,计步数加1,如此循环下去,便可得到周期波形的计数。

图3 滤波后的角度波形图(滤波系数a=0.1;横轴—时间/100 ms;纵轴—加速度/g)
该计数算法关键在于阈值Threshold的选取。由于加速度波形的峰-峰值因个人运动强度的差异而有所不同,不能采用固定值,所以本文选取了一定时间内的加速度均值作为阈值Threshold。建立一个先入先出队列(FIFO)存储每个新的加速度采集值,去掉最早进入FIFO的加速度值,并重新计算FIFO队列中加速度值的平均值作为新的Threshold阈值,如此来实现基于动态阈值的计步算法。
2)无效计步的剔除。
计步功能利用此算法可以很好地工作,但有时显得太敏感。当人体姿态检测/计步模块因步行或跑步之外的原因而非常迅速或非常缓慢地振动时,计步算法也会认为它是步伐。为了找到真正的有节奏的步伐,必须排除这种无效振动。假设人的步伐为1~5步/秒,则两个有效步伐的时间间隔在0.2~1.0 s之内,当根据计步算法得到的步伐时间超出时间范围则将其标为无效计步并排除。此外,再建立一个计步规则用于确定步伐是否是一个节奏模式的一部分,即出现连续5个有效步伐时,才将步伐加入计数。通过以上方法对计步算法进行优化,便可更准确地检测出步伐并计数。
3 系统功能测试与分析
3.1 系统操作步骤
基于BLE技术的人体姿态检测与计步系统的操作步骤如下:
1)将姿态检测/计步模块穿戴于人体被检测部位;
2)打开移动客户端软件,开启蓝牙4.0扫面穿戴的模块,扫面成功后可获得模块的设备名称和设备地址,连接状态为“disconnected”,如图4(a)所示;
3)通过蓝牙连接姿态检测/计步模块,如图4(a)所示,连接成功后可以获取到设备的供电电压,如图4(b)所示;
4)根据模块将实现的功能选择对应的工作模式,如图4(a)所示。
3.2 人体姿态检测功能测试
1)人体姿态角度检测。

图4 移动客户端软件操作界面
以头部姿态检测为例,将姿态检测/模块按照要求佩戴于头部后脑勺部位,然后根据系统的操作步骤连接模块并设置对应工作模式。此时,系统便会按照设置的工作模式开始采集头部加速度信息并进行计算和分析。由于每个人的站姿、坐姿等姿态都不可能完全一致,因此系统设计了标准姿态的校准功能,如图5所示,用户将头部保持一个标准姿态时,点击“SetZero”按钮将当前头部测量角度Angle0设置为角度偏移量,之后把每个测量角度值Angle1减去Angle0得到的角度差Angle作为头部弯曲角度值。此外,系统提供非正常姿态报警功能,用户可在软件界面点击 “SetMax”设置头部弯曲角度的报警阈值,当计算得到的Angle值大于该值时,系统将给出报警提示。图5给出了头部弯曲前后的软件截图,图中的3D人体图会随着实时测量的头部姿态角度进行对应的头部角度弯曲。
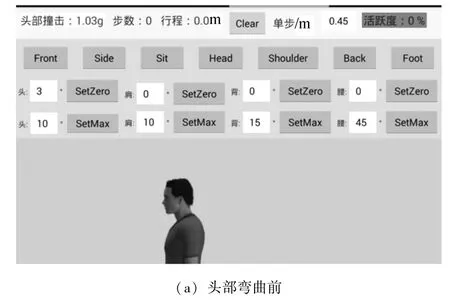

图5 头部姿态检测软件截图
2)人体摔倒检测。
要实现人体摔倒检测功能,需要佩戴两个姿态检测/计步模块,分别穿戴于头部和腰部。使用过程中主要通过测量腰部弯曲角度来检测人体是否处于直立状态,当检测到人体摔倒时将摔倒头部产生的最大加速度值和加速度方向保存,从而为后期诊断提供一个参考。与头部检测类似,用户可以为正常的腰部姿态设置标准姿态和最大角度阈值,当测量角度值大于设置的阈值时,系统认为人体处于摔倒状态,提供报警并保存相应数据。如图6所示,为测试过程中的软件截图。

图6 摔倒检测过程中软件截图
3.3 计步功能测试
将计步模块按照要求穿戴于腿部,设置对应工作模式后即可开始计步。如图6所示,可以在得到步数的基础上设置单步的距离 (图中为0.45 m),从而可估算出对应的行程。为了验证计步的准确度,同时使用本系统和苹果手机进行200步的计步检测。如表2所示,给出了测试结果,从表中可看出,与苹果手机测量结果相比较,本系统的均值更加接近200步的真实值,且标准差也较小,所以本系统所使用的计步方法和算法要优于苹果手机自带的计步功能。

表2 计步功能测试与对比表 (200步)
3.4 模块功耗检测与分析
使用稳压电源为姿态检测/计步模块供电,并将万用表串联其中用以测量模块的电流,切换模块的所有工作模式,模块在各个模式下的功耗,得到如表3所示的结果。根据模块所使用的芯片可知,模块正常工作的最低电压为2.0 V,当供电电压低于2.0 V时,模块会自动停止工作并进入深度休眠模式。经实际测试,在计步功能模式下,采用全新的3.0 V的南孚纽扣电池供电,从模块启动到自动进入休眠,可以工作97.8 h。

表3 姿态检测/计步模块在3V供电下的功耗
4 结束语
本文基于BLE技术设计并制作了人体姿态检测与计步系统,该系统利用三轴加速度传感器收集人体的姿态信息,并通过蓝牙发送到客户端,最后在客户端显示处理好的信息。根据用户需求,可以通过传感器的穿戴位置及数量的不同组合,实现跌倒检测、坐姿矫正提醒、计步等功能。由于本装置只采集加速度信号,且使用蓝牙传输,因此具有携带方便、受环境干扰小及使用范围基本不受限制的特点;此外,利用传感器佩戴位置和携带数量的不同组合,可以灵活实现多种功能。装置采用的芯片均为低功耗型,可持续工作90 h以上。
本文还对系统的坐姿矫正提醒、跌倒检测及计步功能进行了多次实验,验证了本系统的可行性和实用性。
由于时间和实验设备等条件限制,本系统还有很多方面可以继续深入研究,主要包括以下内容:将加速度传感器与陀螺仪等其他传感器结合,通过多种参数来确定人体姿态,使获得的姿态信息更丰富、准确;深入学习生物力学相关知识,发掘更多可以通过加速度传达出来的人体姿态信息,丰富本装置的功能;由于蓝牙传输距离相对较短,可以尝试将其他无线传输技术(如WiFi),实现远距离的人体姿态监控。
[1]张龙.从身体姿态评估看在校大学生的体形[J].广东农工商职业技术学院学报,2008,24(4):33-35.
[2]杜波,刘奭昕.人体姿态检测装置的设计[J].长春工程学院学报(自然科学版),2012,13(4):108-110.
[3]BOURKE A,OBRIEN J,LYONS G.Evaluation of a threshold-based tri-axial accelerometer fall detection algorithm[J].Gait&Posture,2007,26(2):194-199.
[4]LI Q,STANKOVIC J A,HANSON M A,et al.Accurate,fast fall detection using gyroscopes and accelerometerderived posture information[C]//In Proceedings of the 6th International Workshop on Wearable and Implantable Body Sensor Networks.Berkeley:Institute of Electrical and Electronics Engineers,2009.
[5]王子洪.基于穿戴式系统的研究现状与展望中国医疗设备[J].中国医疗设备,2012,27(2):62-65.
[6]徐岳峰,周书仁,王刚,等.基于深度图形梯度特征的人体姿态估计[J].计算机工程,2015,41(12):201-205.
[7]黄鲜萍,王万良,占怡莹,等.视频中关键人体姿态的识别[J].小型微型计算机系统,2014,1(1):167-171.
[8]姜明涛,张建国.基于电磁跟踪系统的人体上肢运动测量[J].天津科技大学学报,2005,20(1):37-39.
[9]张庆宾,田国会,张衍儒.基于AHRS的人体姿态捕捉系统的设计和实现[J].高技术通讯,2013,23(12):1292-1298.
[10]SHI G Y,CHAN C S,LI W J,et al.Mobile human airbag system for fall protection using mems sensors and embedded SVM classifier[J].Sensors Journal,2009,9(5):495-503.
[11]PREKOPCSA K Z.Accelerometer based real-time gesture recognition[C]//In Proceedings of the 12th International Student Conference on Electrical Engineering.Prague:Czech Republic,2008.
[12]XU S.Application research of MEMS ADXL345[J].Advanced Materials Research,2012,20(2):1550-1553.
[13]陈银溢.基于CC2541和LIS3DSH的计步器设计[J].机械工程与自动化,2014(6):96-98.