六足仿生机器人的设计与制作
2018-05-10廖啸林许子羽戴嘉文
刘 静,廖啸林,许子羽,林 冲,戴嘉文
(江西理工大学 机电工程学院,江西 赣州 341000)
0 引 言
机器人在各个领域中都有广泛应用,常用于遥控操作完成远程作业和各种物理试验,同时机器人在玩具领域中也备受青睐,行走机器人更是在各领域中经常使用的类型,目前行走机器人常采用轮式结构,这样的结构虽行走灵活,但是仿生效果不佳,也不够新颖[1],现需要一种行走仿生机器人来弥补轮式机器人仿生效果不够的缺点。随着三维图形技术的成熟和仿真技术的完善,计算机虚拟样机仿真设计使产品设计周期和成本大幅度降低。笔者采用虚拟样机技术对其进行试验研究,即利用UG NX10.0建立六足仿生机器人的虚拟样机模型,并利用这个虚拟模型进行相关的运动学试验,对其机构或机构上某点的位移、速度、加速度准确表达,从而设计出理想的仿生机器人。
1 虚拟样机模型的建立
利用UG中的建模模块和装配模块对六足仿生机器人进行建模和装配。主体结构包括底板、短边板、长边板、电机板、电机、主动齿轮、行走齿轮、联动齿轮、传动齿轮、方头轴、转臂、支脚轴、行走支脚、安装槽、联动轴、传动轴。底板的两条短边和两条长边分别与短边板和长边板组成可拆卸连接,短边板与长边板组成可拆卸连接,短边板和长边板的上部与电机板配合,电机板上部可拆卸连接有电机,电机与主动齿轮配合,长边板上转动设置有上下两排行走齿轮和联动齿轮,长边板的中心位置处转动设置有传动齿轮,行走齿轮和所述联动齿轮啮合,位于中部的两个行走齿轮均与所述传动齿轮啮合,行走齿轮与方头轴配合,方头轴的两端均与转臂一端配合,转臂另一端具有支脚轴,支脚轴与行走支脚转动配合。建立的三维模型如图1所示。
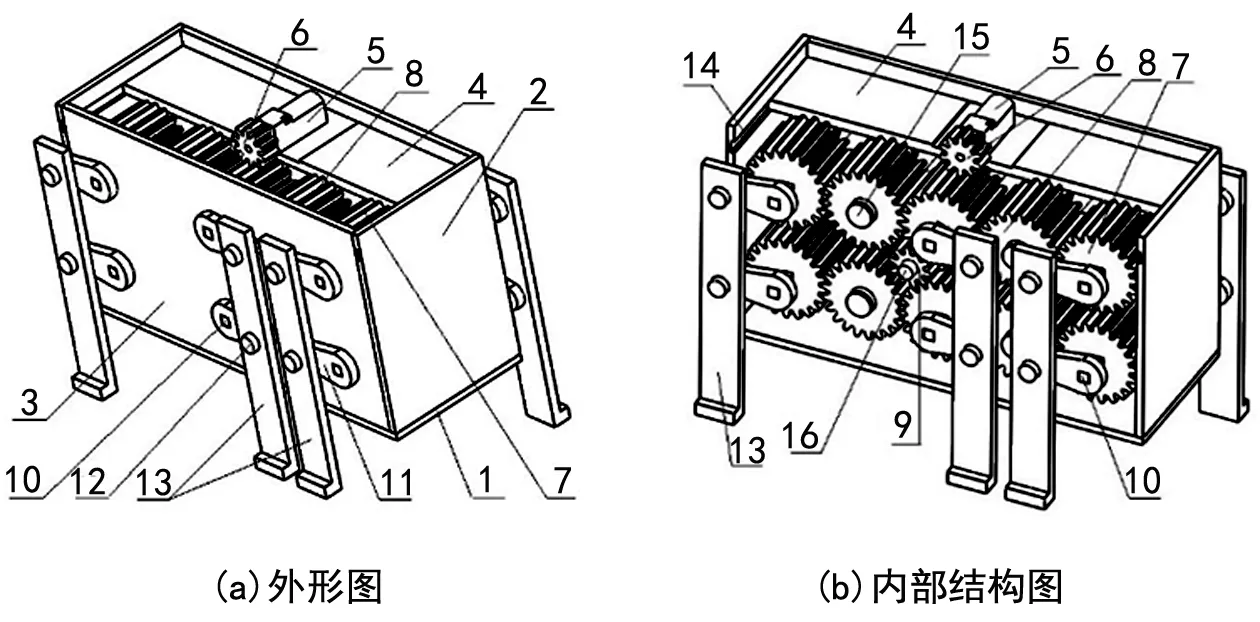
图1 六足仿生机器人虚拟样机1.底板 2.短边板 3.长边板 4.电机板 5.电机 6.主动齿轮 7.行走齿轮 8.联动齿轮 9.传动齿轮 10.方头轴 11.转臂 12.支脚轴 13.行走支脚 14.安装槽 15.联动轴 16.传动轴
2 创建运动分析方案
在UG的运动仿真模块,对上述的仿生机器人进行运动仿真,创建不同的解算方案,依据准确的数据检验并进行优化设计,使产品更加完善。运动分析方案的创建是进行运动仿真的关键,其步骤可分为四步:创建连杆,创建运动副,定义运动驱动,创建解算方案[2]。
(1) 连杆的创建 连杆是最基本运动单元,每一个运动的零件都必须创建为连杆[3]。点击工具条中的“连杆”命令,依次选取部件定义连杆,以不同的名称命名,如L001、L002、L003……用于区分连杆。
(2) 运动副的创建 运动副是以约束的形式将机构中的两个连杆连接在一起,从而使连杆一起运动。UG NX10.0运动仿真模块中提供了15种不同的运动副,基本覆盖了常见机构的运动形式。
(3) 定义运动驱动 运动驱动[4]是赋在运动副上控制连杆运动的参数,共有4种类型:①无驱动;②恒定驱动;③简谐运动驱动;④运动函数驱动。该仿生机器人在主动齿轮上设定驱动参数,使主动齿轮以100 r/min的速度匀速转动。
(4) 解算方案的创建 解算方案的创建,是产品优化设计的重要依据。在创建解算方案时,需要输入运动分析类型,时间和步数等参数,如图2所示。同时在六足仿生机器人的行走支脚上做一个标记点,便于观察其运动轨迹。

图2 运动仿真解算方案
3 仿真结果分析
在UG的运动仿真模块,可以很方便地进行机构的运动仿真,获得精确的仿真数据[5]。如在上面的仿生机器人行走支脚上标记的A001点,其位移、速度、加速度等信息可以通过电子表格的形式生成,如图3、4、5所示。
4 3D打印实物样机
3D打印即快速成型技术的一种,它是一种以数字模型文件为基础,运用粉末状金属或塑料等可粘合材料,通过逐层打印的方式来构造物体的技术。在计算机中将设计的虚拟样机经过切片软件转化为3D打印机所能识别的G代码,最终获得机器人的实物样机。六足仿生机器人实物样机如图6所示。

图3 标记点A001的位移示意图

图4 标记点A001的速度示意图
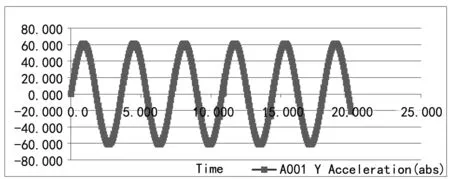
图5 标记点A001的加速度示意图

图6 六足仿生机器人实物样机
5 结 语
利用UG NX10.0软件,可以依据创意建立六足仿生机器人的虚拟样机,可以方便的进行机构的运动仿真,还可以求解出各个部件的位移、速度、加速度和力等数据,这些对于缩短产品开发周期,提高产品质量和性能有着积极的作用。
参考文献:
[1] 李满宏,张明路,张建华,等.六足机器人关键技术综述[J].机械设计,2015,32(10):1-8.
[2] 张争艳,刘彦飞,冯 敏,等.基于虚拟样机技术的六足仿生机器人设计与仿真[J].装备制造技术,2007(10):35-43.
[3] 李 锐.基于UG的机构运动仿真分析[J].常州工程职业技术学院学报,2010(1):30-33.
[4] 冯 巍,杨 洋.慧鱼六足仿生机器人步态研究与实现[J].机械设计与研究,2005,21(3):35-37.
[5] 唐伟强,聂世涛.基于UG的揉面机机构运动分析[J].包装与食品机械,2009,27(5):22-24.
