基于自适应控制的四旋翼飞行器控制系统研究
2018-05-10颉俊杰赵志刚孟佳东
颉俊杰,赵志刚,孟佳东
(兰州交通大学 机电工程学院,甘肃 兰州 730070)
0 引 言
四旋翼飞行器是一种可以垂直起降、悬停以及快速改变航向的无人飞行器,它结构简单、紧凑,操作灵活方便,能够在狭小的空间内完成各种飞行任务,具有重要的军事和民用价值,同时,四旋翼飞行器是一个多输入多输出的非线性、欠驱动、强耦合系统[1],模型参数具有不确定性和时变性,在复杂环境下执行任务时容易受到外界环境的干扰,导致常规PID控制器很难使四旋翼按照期望的轨迹稳定飞行。因此,为了实现四旋翼飞行器安全、平稳、可靠的飞行,必须设计性能更加优越的控制系统[2]。
目前,国内外众多学者对四旋翼飞行器的控制系统研究已经取得了不少成果,文献[3~5]在动力学模型基础上,分别采用串级PID控制和模糊PID控制方法对四旋翼飞行器进行姿态和位置控制,通过反复整定控制参数取得了一定的控制效果;文献[6]对多输入多输出小型同轴式旋翼飞行器的动力学状态空间模型进行参数辨识,然后对模型进行线性化处理并设计了悬停状态下的LQ控制器。上述控制方法在室内飞行实验中均取得了比较理想的控制效果,但在复杂气象环境下的室外飞行实验中控制效果不理想,飞行器会出现明显的漂移和震动。
为了解决四旋翼飞行器在复杂气象环境下参数不确定性和时变性所带来的漂移和震动,提高飞行器的抗干扰能力和控制效果,在动力学模型基础上划分控制任务,并基于Lyapunov稳定性理论,设计自适应控制器。与常规PID控制器相比,自适应控制器不仅保证了闭环控制系统的稳定性,而且能抑制较大范围的干扰,保证四旋翼飞行对特定轨迹的跟踪性能。
1 四旋翼飞行器动力学建模
如图1所示,为四旋翼飞行器的结构简图,机架呈刚性十字结构,固定在机架末端的四个螺旋桨由无刷电机驱动,其中,1号和3号螺旋桨顺时针旋转,2号和4号螺旋桨逆时针旋转,这种布置结构可以相互抵消反扭力矩。通过改变四个螺旋桨的转速可以实现飞行器不同的运动姿态,如升降、横滚、俯仰和偏航运动。
首先建立两个坐标系,其中,大地坐标系OE-xEyEzE用来定义飞行器在空间的位置和姿态角,机体坐标系OB-xByBzB用来定义飞行器的线速度和角速度。为了便于动力学建模和分析,将四旋翼飞行器的中心作为质心,忽略机体的机械震动和弹性变形,系统可简化为六自由度刚体,且结构对称。

图1 四旋翼飞行器结构简图
在大地坐标系中,飞行器质心在三个坐标轴上的位置矢量和姿态角矢量为:
(1)
(2)
在机体坐标系中,飞行器在三个坐标轴上的线速度矢量和角速度矢量为:
(3)
(4)
那么根据坐标转换原理,四旋翼飞行器在两个坐标系下的位置矢量和速度矢量的关系可表示为:
(5)
(6)
式中:T和R分别表示机体坐标系相对于大地坐标系的旋转变换矩阵。
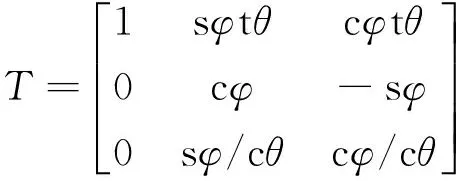
(7)
R=
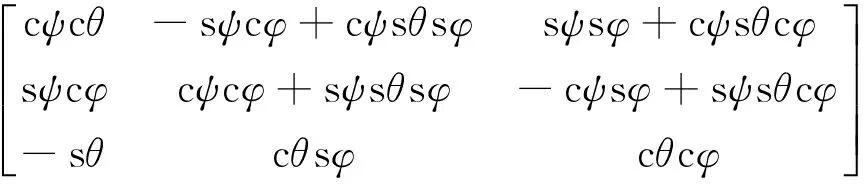
(8)
式中:φ、θ、ψ分别表示横滚角、俯仰角和偏航角,c表示cos,s表示sin,t表示tan。
根据牛顿定理和欧拉定理,对四旋翼飞行器进行受力分析可得:
(9)
式中:m为飞行器质量,I3×3为3阶单位矩阵,J为机体绕三个坐标轴的转动惯量矩阵,FB和τB为飞行器受到的力和力矩。
(10)
那么四旋翼飞行器的动力学方程可表示为:
(11)
式中:u1,u2,u3,u4分别为升降、横滚、俯仰和偏航运动的控制量;g为重力加速度。
2 模型参考自适应控器设计
2.1 模型参考自适应控制器结构
模型参考自适应控制系统的结构简图如图2所示,主要由带有未知参数的被控对象、参考模型、可调参数控制器和自适应机构组成。其基本原理是将输入信号r同时施加到控制器和参考模型的输入端,参考模型的输出ym表示系统期望的动态响应,被控对象的输出y表示系统实际的动态响应。自适应机构根据广义误差信号e来校正控制器中的参数,使被控对象的输出尽可能跟踪参考模型的输出。

图2 模型参考自适应控制系统结构简图
2.2 自适应控制器设计
四旋翼飞行器是一个欠驱动系统,为了实现对期望指令[xcyczcψc]的轨迹跟踪,利用动态反演技术将式(11)描述的四旋翼飞行器模型划分为两个互相串联的子系统,结构简图如图3所示。

图3 四旋翼飞行器自适应控制结构简图
第一个子系统称为水平位置控制系统,其数学模型可表示为:
(12)
该子系统的内部结构如图4所示,[xcyc]T表示系统的输入,[xy]T表示系统当前的实际置,[xdyd]T表示参考模型的期望值,[φcθc]T表示期望姿态角,s1表示跟踪误差。

图4 水平位置控制结构简图
定义q1=[xy]T,那么上式可表示为:
(13)
(14)
该子系统的期望轨迹q1d可由如下参考模型的状态空间方程形式来定义:
(15)
式中:参数矩阵Am1和Bm1表示参考模型的理想状态性能。那么,水平面内的广义位置误差e1和组合跟踪误差s1可表示为:
(16)
(17)
(18)

第二个子系统称为位姿自适应控制系统,其数学模型可表示为:
(19)
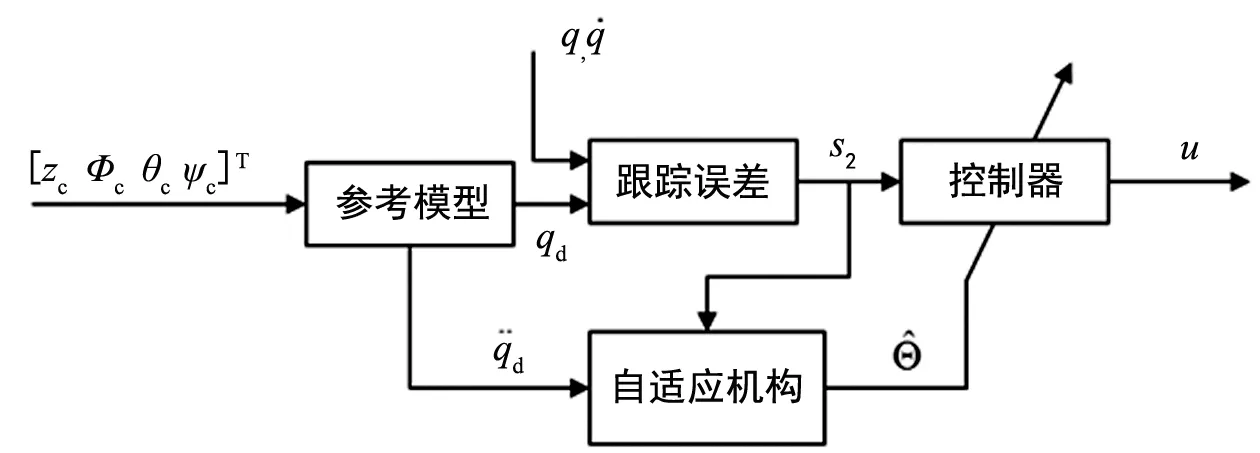
图5 姿态和纵向自适应控制结构简图
定义q2=[zφθψ]T,那么上式可表示为:
ΘΦ=u
(20)
同理,该子系统的期望轨迹q2d可由如下参考模型的状态空间方程形式来定义:
(21)
式中:参数矩阵Am2和Bm2表示参考模型的理想状态性能,那么,广义跟踪误差e2和组合跟踪误差s2可表示为:
(22)
(23)
式中:参数矩阵Λ2=diag(λzλφλθλψ)为正实数对角矩阵。下面构造一个包含跟踪误差s1,s2和未知参数Θ的Lypaunov函数为:
(24)

(25)
3 仿真实验
在Matlab/Simulink中利用前面设计的自适应控制算法,搭建四旋翼飞行器仿真实验平台,分别对比在两种控制策略下四旋翼飞行器对期望轨迹的跟踪性能。仿真系统中,选择正定矩阵P=diag(1, 1, 1, 1, 5, 5),四旋翼飞行器的期望轨迹为:从地面起飞到2.5 m高处,然后做边长为3 m的正方形运动。仿真结果如图所示,其中,图6为四旋翼飞行器空间运动轨迹,图7~9分别为四旋翼飞行器在X、Y、Z方向的运动轨迹。

图6 四旋翼飞行器空间运动轨迹

图7 四旋翼飞行器X方向运动轨迹
仿真结果表明:在相同的飞行环境和飞行指令下,分别采用自适应控制算法和PID控制算法控制四旋翼飞行器做正方形运动时,都达到了一定的控制效果。但是,在PID控制下飞行器存在明显的漂移和振动,控制效果欠佳,而自适应控制器能很好的抑制飞行器的漂移和振动,对飞行器的姿态稳定效果和特定轨迹的跟踪性能明显优于PID控制。

图8 四旋翼飞行器Y方向运动轨迹

图9 四旋翼飞行器Z方向运动轨迹
4 结 语
主要研究了四旋翼飞行器的建模与控制问题。在理论建模的基础基于Lypaunov稳定性理论设计了模型参考姿势自适应控制器,并在仿真环境下分别对比了自适应控制算法和PID控制算法对四旋翼飞行器在模型参数不确定和时变情况下的控制效果,自适应控制算法能很好的抑制飞行器的漂移和振动,具有一定的实际应用价值。
参考文献:
[1] 聂博文,马宏绪,王 剑,等.微小型四旋翼飞行器的研究现状与关键技术[J].电光与控制,2007(6):113-117.
[2] 米培良.四旋翼飞行器控制与实现[D].大连:大连理工大学,2015.
[3] Tommaso Bresciani. Modelling, Identification and Control of a Quadrotor Helicopter [M]. Lund Sweden:Department of Automatic Control Lund University,2008.
[4] 张 镭,李 浩.四旋翼飞行器模糊PID姿态控制[J].计算机仿真, 2014(8):73-77.
[5] 乌仁别丽克.基于串级PID控制算法的四旋翼无人机控制系统设计与实现[D].上海:东华大学,2016.
[6] Jyunki,Hiroaki.MIMO closed-loop subspace model identification and hovering control of a 6-DOF coaxial miniature helicopter[C]. SICE conference,Japan,2014:1679-1684.
