浅析机器人全站仪在机电施工中的应用
2018-05-09王文豪
王文豪, 薛 庆, 鞠 明
(四川省第六建筑有限公司, 四川成都 610081)
1 机器人全站仪技术背景
近年来,伴随着建筑业信息化发展,BIM(建筑信息模型)作为一项带来行业革命的新技术,已成为推动建设行业智慧发展的重要工具。BIM技术也为提高施工效率、确保施工质量带来了新的突破。
BIM通过数字技术以构件为基础在计算机中建立一座虚拟建筑,其中包含了工程项目的有用信息(几何和非几何信息),对这些信息加以利用,协助各方对项目全生命周期各阶段(设计、施工和运营)进行集成化和自动化管理。
建筑业传统机电安装放样时,一般使用卷尺现场测量和红外线放线等方式,效率低,误差大,无法解决精细化安装前的测量问题。而在机电综合管线施工过程中引入机器人放样技术,基于BIM信息模型在施工现场以数字信息化激光打点的形式快速准确放样,该技术贯穿深化设计、管线安装施工、施工验收等整个机电安装施工周期,解决了传统测量放样难、累积误差大、精度低的种种问题,可有效的提升项目施工质量,缩短施工周期,提高现场管理的信息化水平。
机器人全站仪指的是在传统人工操作全站仪的基础上,搭载可以识别轻量化BIM模型的机器人,通过处理后的BIM模型操作机器人,从而实现半自动放样的一种新型技术。与传统放样方式相比,机器人全站仪具有“一次设站,多次放样,节省放样时间”、“最大化减少人工操作误差,提高放样精度”等特点。
在华西附二院项目BIM模型深化过程中,工程所需信息皆已陆续集成于BIM模型中,机器人全站仪通过借助于模型导出传统平面定位的形式来实现指导现场精确定位安装。其实际应用价值无论从施工图深化设计成果的准确度、施工图深化设计时间周期及信息传递皆已远远超出了基于传统设计模式的施工图深化成果。
2 华西附二院安装项目介绍
四川大学华西第二医院锦江院区属于三级甲等医疗服务项目,位于成都市东南部三环路与绕城高速之间,东南两侧临成都著名休闲景区—三圣花乡,具有良好的城市景观绿化。
项目的总规划用地面积为63 961.45 m2,规划总建筑面积(新建,含一期、二期)209 950 m2,一期新建总建筑面积为154 596 m2,包含门诊医技楼,建筑高度25.50 m(成龙路入口层计算),地下2层,地上5层,第一住院楼,建筑高度72.10 m(紫罗兰入口层计算),地下1层,地上16层。承建单位为四川省第六建筑有限公司。
3 现场放样情况
3.1 放样试验区域简介
放样试验区域为三层轴线范围17-18轴交S-W轴的一个长走廊(图1),该走廊包含各种类型及系统的管网综合应用要素,应用内容为该走廊区域内的给排水、强电、弱电、暖通等机电各专业、各系统安装,包括保温、阀件和支架的安装等,具备典型代表特点,因此具有作为示范及应用区域的条件。

图1 放样区域示意
3.2 传统放样简介
前文提到过传统放样方法为通过卷尺测定每一个需要打吊杆的位置,然后进行安装;或者通过卷尺测量两个点位,然后放上红外线放线仪器,再进行安装。前者用于普遍安装,后者用于直线段管道安装,如地下室吊灯的安装。这两种放样方法没有本质区别,只是后者多了一个安放红外线放线仪器的过程,在安装比较长的直线管段时相对节省时间。由于传统放样方式为施工单位所普遍采用且熟悉的方法,故只针对第一种普遍的方法作简单介绍。
3.2.1 传统放样过程
根据图纸标注,用卷尺测量出需要打吊杆的位置,在对应位置做好标记,并开始安装支架或吊杆。
3.2.2 传统放样方法简单评价
传统放样方式方法简单,为目前安装工程中普遍采用的方式,传统放样的缺点也显而易见。
放样精度低。传统放样过程中,完全采取手工卷尺测量的方法,存在着较大的误差,同时还容易产生累积误差。
放样效率低。传统放样时,采取的是各劳务班组自行安排放样工作,一般工程中按水、暖、电、消防专业分类,每专业需要两个人进行放样,即需要8人。
3.3 机器人放样过程
由于放样内容为室内综合管线安装,绝对坐标系意义不大,故采取相对坐标系,即相对于建筑轴网位置的坐标系。
全站仪在操作时,需要两至三个控制点位,用于在现场架设确定仪器架设的精确位置,即设站,这些点位即为控制点。在全站仪设站完成后,即可对事先标记的多个管道点位进行放样,即放样点位。
在BIM模型上选取了三个通视的控制点,同时实地测量并做好标记。经测量,这三个点的误差都在±10 mm以内,属于可接受范围。
将BIM模型导入到全站仪中,在现场通过后视法对应三个控制点的位置,即可实现BIM模型与现场对应,开始放样。
前文已对机器人放样做过简介,此处不再赘述。下面对机器人放样全过程作详细介绍。
3.3.1 模型上标记控制点
机器人全站仪可识别的点位为特定格式,需要转换软件对原有BIM模型进行抓点操作。将打样区域从原有BIM模型中分离出来,针对打样区域设立副轴网,通过轴网交叉点标记出控制点和放样点位置,同时通过注释表明点位高度。之后,可通过转换软件,将标记的点位抓出为全站仪可识别的点位。
3.3.2 现场标记控制点
在放样开始前,通过现场测量,确定控制点位置,并使用油漆标记出选定好的控制点。放样使用其中两个,第三个控制点作为复核和备用。
控制点位测量是否精准,直接关系到最后放样结果的精度。在实际应用中,应由土建单位的精测人员配合拉线,以确保控制点位的精准(图2~图4)。

图2 测量控制点
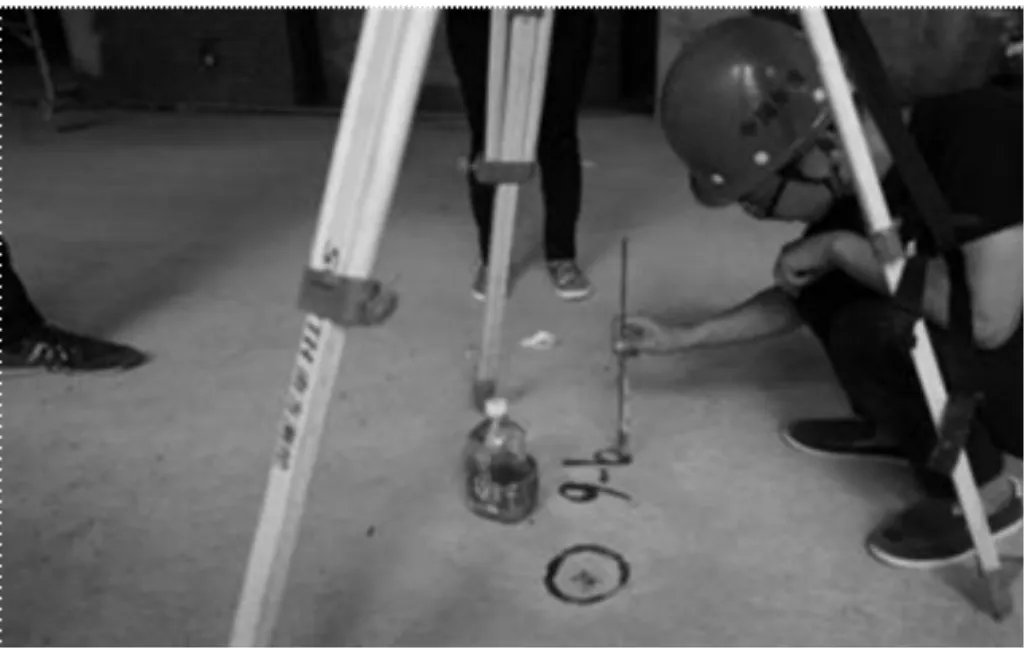
图3 标记控制点

图4 确认第二个控制点位置
在完成两个控制点的标注和全站仪的架设后,需要通过模型核对现场第二个控制点的位置,即上图所示,如有偏差则需要校正。在校正完成后,即完成全站仪设站。
3.3.3 开始放样
BIM模型和控制点确认完毕后,就可以开始放样。通过手持设备遥控放样机器人,对事前在模型上选定的点位进行放样(图5)。图6中的亮点即为由机器人激光打出的点位。
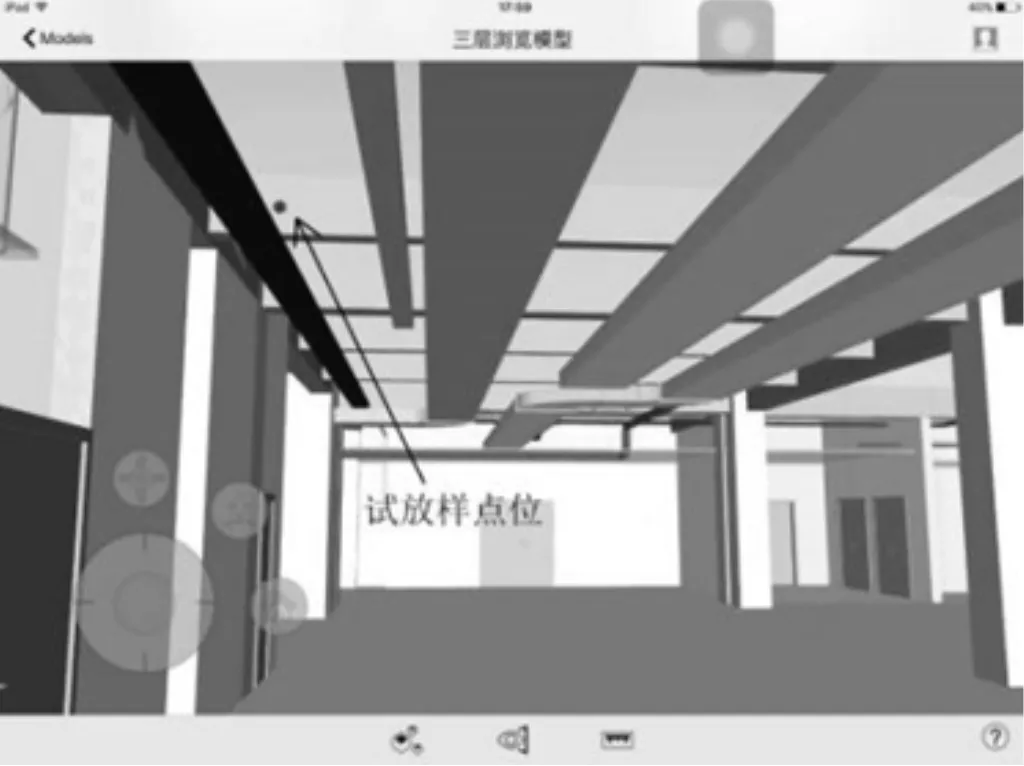
图5 模型中试放样点位的位置

图6 开始放样
红点稳定后,由工人进行标记。在标记完成后,即可开始下个点位的放样(图7)。

图7 标记模型点位
完成所有放样点位的标记后,即可根据标记进行打吊杆,支架安装等工作(图8、图9)。

图8 根据放样点打吊杆

图9 手持设备可视化操作
3.4 机器人放样成果
放样区域根据机器人放样后,安装班组即可进场根据标记好的点位进行安装作业。图10为风管和桥架班组完成安装作业后的现场效果。

图10 放样区域风管桥架安装完成后
4 放样应用评价
4.1 与传统放样的对比
(1)提高放样效率,明显缩短了放样时间。根据计时,整个放样过程持续40 min,共计测放20个点位。若使用传统的卷尺测量放样方式,20个点位则需要2 h;若使用红外线仪放样,20个点位至少需要1.5 h。
(2)提高放样精度。机器人放样点位在一条精准直线上,安装后的误差为1~2 mm,考虑打吊杆的误差,放样精准度大幅提高。而传统放样方法,在测量、标记和打吊杆时都存在误差,而且放样的长度越长,误差越大,特别在地下室安装吊灯时,采取传统放样方法安装的吊灯,在实际操作中,一排吊灯常不在一条线上,需要在安装完成后再进行调整。
(3)节约人工成本。此次放样的操作和放样点的标记由三人完成,其中一人为设备操作技术员,另外两人为工人。应用成熟后,可减少一名设备操作技术员,即两名熟练工人即可完成放样及标记工作。而采取传统的放样方式,每个机电专业至少会投入两名工人,按水、暖、电、消防四个专业计算,投入的最少人力就需要8人。并且放样的区域越大,人员的投入越多。
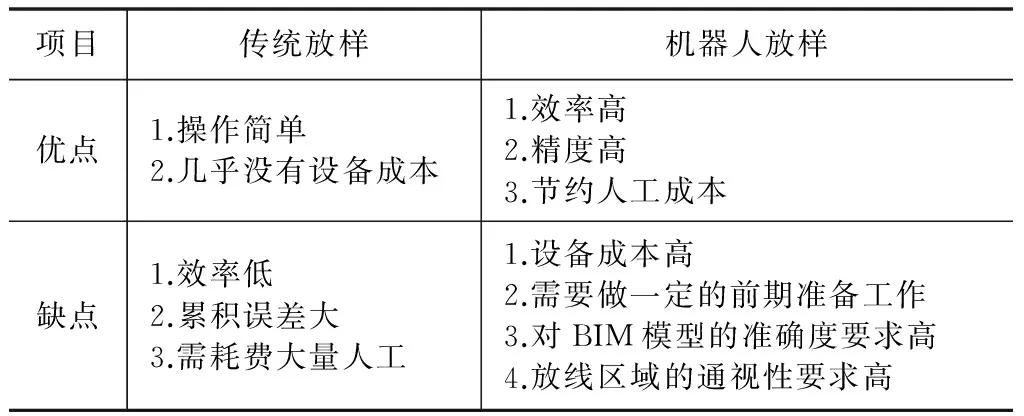
表1 传统放样与机器人放样优缺点对比
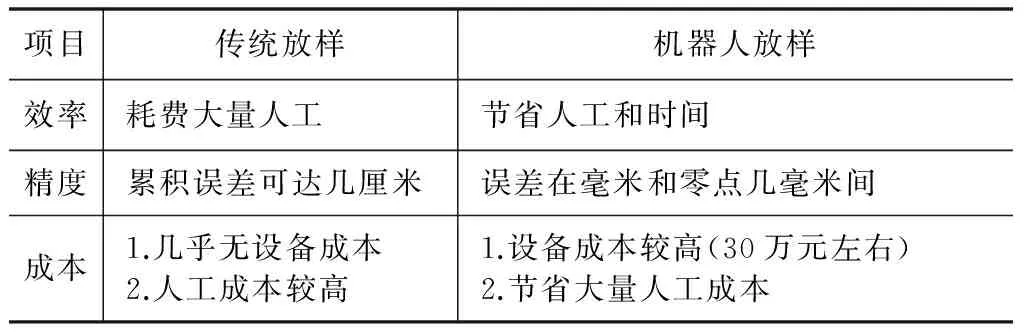
表2 传统放样与机器人放样综合对比
从以上可以看出,机器人放样与传统放样方式相比,具有放样效率高,放样精度高,节省人工成本的优点。做好了前期准备工作,就可以快速而精确地进行放样,越是宽敞越是点位多,例如厂房、钢结构,越能体现出机器人放样的优越性。
4.2 机器人放样的不足
但机器人放样也存在着不足之处。
需要做一定的前期准备工作。目前放样机器人只能识别特定格式下的点位,故需要在事前对放样区域的点位进行标记,并通过转换软件抓点,以达到机器人可识别的要求。
要求更高精细度的BIM模型。采取机器人放样实质上是完全按照BIM模型的管综排布进行安装,故对BIM模型的精确性和合理性提出了更高的要求,并且需要反映出管件的实际大小,例如支架、法兰、阀门等,以确保安装成品的合理性与美观性。
测量控制点位必须精确。由于全站仪仪器对精度要求高,若要达到机电安装的精准性,要求控制点位的测量必须精准,室外的情况需要精测点,室内的情况需要精准的结构施工成品以测出精确的控制点位。
机器人放样尤其适合大开间、通视性较好的厂房、写字楼等建筑的测量放线工作,而通视性较差的住宅类建筑在使用上则还存在一定的局限性。
设备成本较高。仪器的价格较高,一套设备价格在约30万元左右。
以上这些缺点都在一定程度上限制了机器人放样在商品房项目中的应用。
5 应用展望
通过对比发现,建筑结构累积误差越小,越能体现出机器人放样的效率和精度。
机器人放样的特点,决定了它更加适用大范围的复杂结构工程,例如厂房项目或者钢结构工程项目。这样的项目自身结构施工就相对精准,并且放样的可视范围较为宽敞,在单个厂房中只需架设一次全站仪,即可完成房间内所有点位的放样标记,大大的优于传统放样方式;在钢结构工程项目中,单个房间内的点位繁多而复杂,必须采用全站仪来测量放样,而传统的全站仪,需要每放一个点测一个控制点,即每个点位都需要重新设站。而采取机器人放样只需一次设站,便可大幅度缩短放样时间,同时保证放样精度。
6 结束语
BIM(建筑信息模型)自20世纪70年代在美国提出后,作为整个建筑业的新型理念和技术,由于其在建筑设计、施工图纸深化、施工管控、运营维护等建筑全生命周期中都有着显著的优势,因此先后在世界多个国家得到了应用及推广。从全球化的角度来看,BIM 技术在建筑领域的应用已逐渐成为主流,也是建筑信息化的必然产物。目前我国的BIM 技术现在仍处于应用的发展阶段,还有许多方面需要结合国情进行探索和深入。
BIM技术在我国发展至今,3D建模已初步成熟,而对于更高维数的应用探索中,许多施工企业已经在摸索,如何将BIM模型通过技术手段更好的与现场施工相结合,体现出BIM模型的先进与优势,这已成为了众多企业的研究课题。笔者认为,目前大多数企业已经不仅仅满足于将BIM模型作为一种高级的CAD图纸来使用,而是期望它表现出更多的价值。可以预见,未来一段较长的时间内,BIM的发展趋势将集中在BIM模型与现场结合,实现模拟施工、指导施工、材料成本和进度管控等方面,即BIM技术的落地性。在这些应用方面尽早、及时的进行研究并取得一定成果,将会为施工企业未来的发展争取到巨大的优势。
