一种改进的自适应匹配滤波方法
2018-05-08王泽玉卢云龙
王泽玉, 李 明, 卢云龙
(西安电子科技大学 雷达信号处理国家重点实验室,陕西 西安 710071)
一种改进的自适应匹配滤波方法
王泽玉, 李 明, 卢云龙
(西安电子科技大学 雷达信号处理国家重点实验室,陕西 西安 710071)
针对雷达目标检测中由于训练数据缺失导致传统自适应检测方法的检测性能下降的问题,提出一种改进的自适应匹配滤波方法.该方法首先将杂波用自回归过程表示;然后假设自回归参数已知,推导出广义似然比检验表达式; 最后将采用训练数据估计得到的自回归参数的最大似然估计值代入广义似然比检验表达式中,代替已知的自回归参数.仿真实验结果表明,与传统的自适应方法相比,这种方法能在训练数据不足时提高检测性能.当雷达回波数目较大时,这种方法的检测性能接近理想的匹配滤波方法.
雷达检测;自适应匹配滤波;自回归建模
在协方差矩阵未知的杂波环境下对目标进行检测是雷达最基本的任务.通常,假设存在一组不含目标的训练数据来估计未知的杂波协方差矩阵.在高斯杂波环境下,文献[1]提出了基于广义似然比检验(Generalized Likelihood Ratio Test, GLRT)的检测方法,该方法需要求得所有未知参数的最大似然估计.为了减少计算量,文献[2]提出了自适应匹配滤波(Adaptive Matched Filter, AMF)方法,首先假设杂波的协方差矩阵已知,推导出广义似然比检验表达式,然后将采用训练数据估计得到的协方差矩阵的最大似然估计值代入检验表达式中来代替已知的协方差矩阵.随后,其他的检测方法[3-6](如Rao检测,Wald检测等)被相继提出.然而,这些检测方法至少需要两倍系统自由度的训练数据来估计杂波的协方差矩阵[7-9].在实际检测环境中,这个条件难以满足.
利用杂波的性质能有效地解决训练数据缺失情况下检测性能下降的问题.众所周知,杂波可以用阶数较低的自回归过程来表示.文献[10]利用自回归频谱估计提出一种自适应滤波方法来抑制杂波.在色高斯噪声环境下,假设目标信号已知,文献[11]将噪声用自回归过程来表示并采用广义似然比检验准则来进行检测.考虑到文献[11]中的目标模型较为简单,文献[12]针对未知幅度的信号,提出一种自回归广义似然比检测方法.渐进性能分析表明,该检测方法具有渐进恒虚警特性.文献[13]在完全均匀场景和不同距离单元的杂波协方差矩阵结构不同的非均匀场景中,针对自回归过程的阶数已知和未知两种情形设计了4种基于广义似然比检验的检测器.近几年,基于多通道自回归过程的检测器也得到了广泛的研究[14-16].
针对训练数据缺失情况下传统检测方法检测性能下降的问题,笔者提出基于自回归的自适应匹配滤波方法.该方法首先将杂波用自回归过程来表示,然后假设自回归参数已知,利用一步广义似然比检验准则设计检测器,最后利用训练数据对自回归参数进行估计,并将得到的自回归参数的最大似然估计值代入一步广义似然比检验表达式中,得到最终的基于自回归的自适应匹配滤波器.
1 问题描述
假设回波包含N个相干脉冲,目标检测问题可以用以下的二元假设检验来表示:
(1)
其中,z0∈CN×1,表示待检测距离单元的数据;zt∈CN×1,t=1,…,K,表示不含目标的一组训练数据;nt∈CN×1,t=0,…,K,是均值为零、协方差矩阵为R的独立复高斯向量;p= [1,exp(jΩ),…,exp(j(N-1)Ω)]T,是导向矢量;Ω是目标多普勒;α表示未知的目标幅度.假设杂波信号nt可以用阶数为M的自回归过程来表示:
(2)
其中,a(m)=[a(1),…,a(M)]T,是复自回归参数向量;wt(l)表示均值为零、方差为σ2的复白高斯噪声,σ2是未知常量.
2 基于自回归的自适应匹配滤波器
为了解决上述问题,采用自适应匹配滤波(即两步广义似然比准则)进行检测.首先假设自回归参数a和σ2已知,基于广义似然比准则推导检验表达式;然后采用训练数据对a和σ2进行估计,将得到的最大似然估计值代入检验表达式中得到最终的结果.
2.1 检测器设计
当N≫M时,z0在H0和H1条件下的概率密度函数可以分别表示为[17]

(5)
其中,η表示检测门限.
由式(4)和式(5)可以看出,参数α的最大似然估计可以通过对表达式J(α)= [u0+Y0a-α(q+Pa)]H[u0+Y0a-α(q+Pa)]求α的最小值得到.将J(α)展开,可以得到
其中,Re[·]表示取实部.显然,当包含绝对值的第1项等于0时,表达式J(α)取得最小值.因此,α的最大似然估计值为
(7)
将α的最大似然估计值即式(7)代入到表达式J(α)中,得到
其中,H=I-(q+Pa)(q+Pa)H/[(q+Pa)H(q+Pa)],是一个幂等矩阵.
将式(3)~(4)和式(8)代入式(5)中,得到基于广义似然比的检验表达式
(9)

2.2 自回归参数估计
利用训练数据对自回归参数a和σ2进行估计,并将得到的自回归参数的最大似然估计值代入一步广义似然比检验表达式(9)中代替已知的a和σ2.训练数据zt的联合概率密度函数可以表示为
(10)
对联合概率密度函数取对数,得到
(11)
对式(11)关于σ2求导并令导数等于零,即可得到σ2的最大似然估计值
(12)
将式(12)代入到式(11)中,可得



(15)
参数a的最大似然估计为
(16)
将a和σ2的最大似然估计值(即式(12)和式(16))代入式(9)中并化简,得到基于自回归的自适应匹配滤波器:
(17)
其中,ηAR-AMF表示检测门限.
3 仿真结果与分析

图1和图2分别为K=2和K=20情况下,N取不同值时检测概率随着信干噪比变化的曲线.为了进行对比,理想的匹配滤波器(Matched Filter, MF)[2]的检测概率曲线也在图中画出.虽然理想的匹配滤波器在实际中无法实现,然而其提供了对比的基准.以下的实验结果均采用理想匹配滤波器检测概率的理论值.从图1和图2可以看出,随着脉冲数N的增加,基于自回归的自适应匹配滤波方法的检测性能逐渐提高.由图1可知,当K=2,N=8,Pd=0.9 时,笔者提出的方法相对于理想的匹配滤波器的性能损失约为 5 dB;当脉冲数N增加到40时,性能损失减小到 1 dB;当脉冲数N增加到100时,性能损失小于 1 dB.因此,当脉冲数较大时,即使在训练数据严重缺失的情况下,笔者提出的方法仍然能获得与理想的匹配滤波器相近的检测性能.从图2可以看出,当K=20,N>40 时,笔者提出的方法相对于理想匹配滤波器的性能损失可以忽略.因此,当脉冲数不是很小时,笔者提出的方法是训练数据缺失情况下检测目标的一种有效方法.
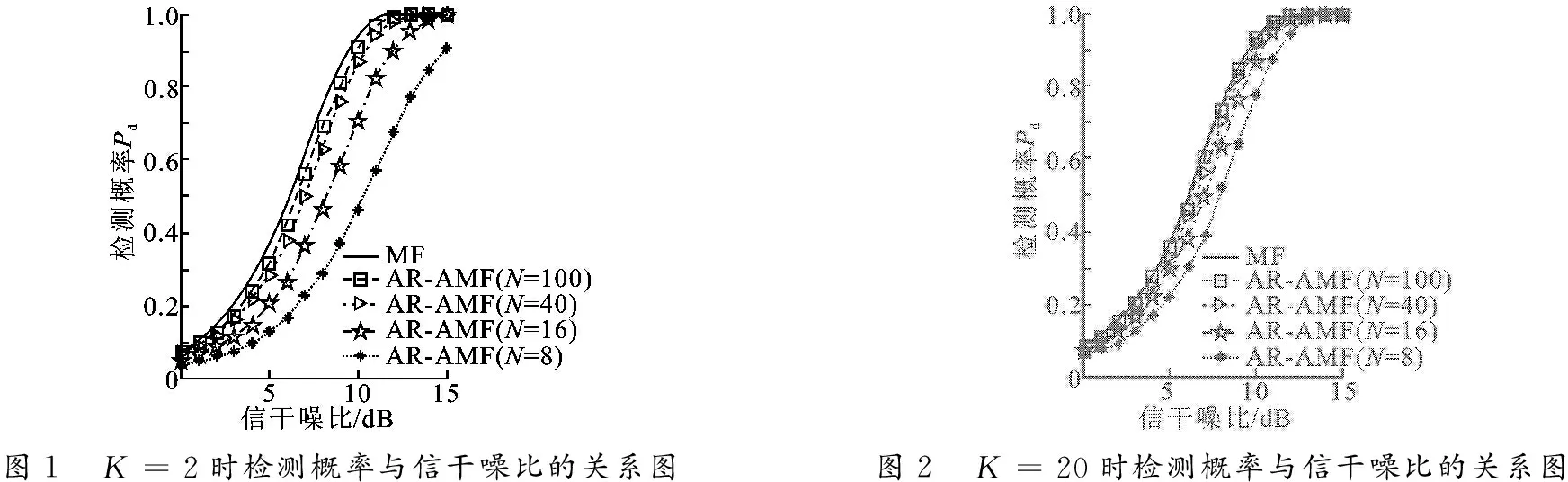
图1 K=2时检测概率与信干噪比的关系图图2 K=20时检测概率与信干噪比的关系图

图3 N=30时笔者提出的检测器和传统检测器的检测性能比较
图3表示N=30,K=5,30,60,150的情况下,检测概率随信干噪比变化的曲线.为了进行对比,传统的广义似然比检测器[1]和自适应匹配滤波器[2]的检测性能也在图中画出.从图中可以看出,随着信干噪比的增加,笔者提出的方法(AR-AMF)、传统的广义似然比检测器(GLRT)和自适应匹配滤波器(AMF)的检测性能均逐渐提高.这是由于训练数据的增加使得估计得到的参数值更加精确.在图3(a)中,传统的广义似然比检测器和自适应匹配滤波并没有画出,这是由于K 从以上仿真可知,在训练数据缺失的情况下,笔者提出的基于自回归的自适应匹配滤波方法通过利用杂波的性质使检测性能有所改善.仿真结果验证了笔者提出方法的有效性. 针对训练数据缺失情况下传统自适应检测方法检测性能下降的问题,笔者提出一种基于自回归的自适应匹配滤波方法.该方法首先利用杂波的性质,将杂波用一个自回归过程表示;然后假设自回归参数已知,推导广义似然比检验表达式;最后利用训练数据估计未知的自回归参数,并将得到的自回归参数的最大似然估计值代入广义似然比检验表达式中,得到基于自回归的自适应匹配滤波检测器.仿真实验表明,在只有少量训练数据存在的情况下,笔者提出的方法优于传统的自适应检测方法.同时,当脉冲数较大时,笔者提出方法的检测性能接近理想的匹配滤波器.下一步的工作拟解决脉冲数较小情况下的自适应检测问题. 参考文献: [1] KELLY E J. An Adaptive Detection Algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 1986, 22(1):115-127. [2] ROBEY F C, FUHRMANN D R, KELLY E J, et al. A CFAR Adaptive Matched Filter Detector[J]. IEEE Transactions on Aerospace and Electronic Systems, 1992, 28(1): 208-216. [3] de MAIO A. Rao Test for Adaptive Detection in Gaussian Interference with Unknown Covariance Matrix[J]. IEEE Transactions on Signal Processing, 2007, 55(7): 3577-3584. [4] de MAIO A. A New Derivation of the Adaptive Matched Filter[J]. IEEE Signal Processing Letters, 2004, 11(10): 792-793. [5] KRAUT S, SCHARF L L. CFAR Adaptive Subspace Detector is a Scale-invariant GLRT[J]. IEEE Transactions on Signal Processing, 1999, 47(9): 2538-2541. [6] PULSONE N B, RADER C M. Adaptive Beamformer Orthogonal Rejection Test[J]. IEEE Transactions on Signal Processing, 2001, 49(3): 521-529. [7] REED I S, MALLETT J D, BRENNAN L E. Rapid Convergence Rate in Adaptive Arrays[J]. IEEE Transactions on Aerospace and Electronic Systems, 1974, 10(6): 853-863. [8] 周宇, 张林让, 刘楠. 贝叶斯雷达自适应检测算法研究[J]. 西安电子科技大学学报, 2012, 39(1): 36-42. ZHOU Yu, ZHANG Linrang, LIU Nan. Research on Bayesian Radar Adaptive Detection[J]. Journal of Xidian University, 2012, 39(1): 36-42. [9] 高永婵, 廖桂生, 朱圣棋. 复合高斯噪声中知识辅助的贝叶斯Rao检测方法[J]. 西安电子科技大学学报, 2013, 40(6): 46-51. GAO Yongchan, LIAO Guisheng, ZHU Shengqi. Knowledge-aided Bayesian Rao Detection Approach in Compound Gaussian Noise[J]. Journal of Xidian University, 2013, 40(6): 46-51. [10] BOWYER D E, RAJASEKARAN P K, GEBHART W W. Adaptive Clutter Filtering Using Autoregressive Spectral Estimation[J]. IEEE Transactions on Aerospace and Electronic Systems, 1979, 15(4): 538-546. [11] KAY S M. Asymptotically Optimal Detection in Unknown Colored Noise via Autoregressive Modeling[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1983, 31(4): 927-940. [12] SHEIKHI A, NAYEBI M M, AREF M R. Adaptive Detection Algorithm for Radar Signals in Autoregressive Interference[J]. IEE Proceedings: Radar, Sonar and Navigation, 1998, 145(5): 309-314. [13] ALFANO G, de MAIO A, FARINA A. Model-based Adaptive Detection of Range-spread Targets[J]. IEE Proceedings: Radar, Sonar and Navigation, 2004, 151(1): 2-10. [14] WANG P, WANG Z, LI H B, et al. Knowledge-aided Parametric Adaptive Matched Filter with Automatic Combining for Covariance Estimation[J]. IEEE Transactions on Signal Processing, 2014, 62(18): 4713-4722. [15] BOUKABAA T, ZOUBIRB A M, BERKANIA D. Parametric Detection in Non-stationary Correlated Clutter Using a Sequential Approach[J]. Digital Signal Processing: a Review Journal, 2015, 36(C): 69-81. [16] GAO Y C, LIAO G S, ZHU S Q, et al. Generalised Persymmetric Parametric Adaptive Coherence Estimator for Multichannel Adaptive Signal Detection[J]. IET Radar, Sonar and Navigation, 2015, 9(5): 550-558. [17] HAYKIN S S, STEINHARDT A. Adaptive Radar Detection and Estimation[M]. New York: Wiley-Interscience, 1992. [18] LI J, HALDER B, STOICA P, et al. Computationally Efficient Angle Estimation for Signals with Known Waveforms[J]. IEEE Transactions on Signal Processing, 1995, 43(9): 2154-2163. Modifiedadaptivematchedfilter WANGZeyu,LIMing,LUYunlong (National Key Lab. of Radar Signal Processing, Xidian Univ., Xi’an 710071, China) In order to overcome the detection degradation for the conventional detectors in the limited-training environment, a modified adaptive matched filter is proposed by modeling the disturbance as an autoregressive process with unknown parameters. The detector is derived by resorting to a two-step design procedure: first derive the generalized likelihood ratio test under the assumption that the parameters of the autoregressive process are known, and then, the maximum likelihood estimates of the parameters, based on the training data, are substituted in place of the true parameters into the test. The detection performance of the new receiver shows that the proposed receiver can lead to a noticeable performance improvement over the conventional adaptive matched filter. For a moderate size of radar echoes, the proposed detector performs close to the optimum matched filter even in the limited-training environment. radar detection; adaptive matched filter; autoregressive process 2017-01-11 时间:2017-06-29 国家自然科学基金资助项目(61271297,61272281, 61301284);博士学科点科研专项基金资助项目(20110203110001);国家部委预研基金资助项目(9140A07020913DZ01001) 王泽玉(1990-),女,西安电子科技大学博士研究生,E-mail: beidou13579@163.com. http://kns.cnki.net/kcms/detail/61.1076.TN.20170629.1734.006.html 10.3969/j.issn.1001-2400.2018.01.003 TN953 A 1001-2400(2018)01-0012-05 (编辑: 郭 华)4 结 束 语
