基于优化变间距法的变截面涡旋型线的节点计算
2018-05-04刘涛,张强
刘 涛,张 强
(兰州理工大学机电工程学院,甘肃 兰州 730050)
涡旋压缩机作为一种新型流体机械,具有高效、节能等优点,广泛应用于制冷以及各种需要进行气体压缩的行业[1]。动静涡旋盘作为涡旋压缩机的关键部件,对机器的性能有着显著的影响。因此涡旋盘的型线设计和加工显得尤为重要[2]。
对涡旋盘型线的设计目前已有较为丰富的理论成果,王立存等提出了新型变壁厚涡旋型线设计理论,刘涛等[3]提出了基于一次曲率半径函数的始端重构型线的组合涡旋型线。对于涡旋盘加工的研究尚少,王霞琴[4]提出了以双圆弧插补的方法逼近涡旋型线的加工方法。目前一般的数控加工系统中只有直线插补和圆弧插补,因此组合型线涡旋盘的加工只能采取数值逼近的方法。
本文针对以组合型线为基线的涡旋型线采用优化的变间距直线逼近方法来拟合加工点,与传统的等间距法逼近该涡旋型线相比[5],优化的变间距法能有效地减少节点数目,并且保证拟合误差在控制范围之内,编程效率与加工效率得到了有效的提高,满足实际生产的需要。
1 组合型线方程的分析
涡旋盘组合型线的母线由基圆渐开线、高次曲线与圆弧组成。
1)第一段:基圆渐开线部分。
式中:φ为渐开线角度。
2)第二段:高次曲线部分。
式中:Rg2为展弦,Rg2=-11.821+4.213 2(φ-0.5π)-0.260 4(φ-0.5π)2;Rs2为基圆半径,Rs2=32.146 4-11.82 1(φ-0.5π)+2.106 6(φ-0.5π)2-0.086 8(φ-0.5π)3。
3)第三段:圆弧部分。
母线型线方程建立后,依据法向等距法[6]即可生成涡旋压缩机的型线。母线方程如图1所示。

图1 母线方程
2 算法的优化
2.1 传统等间距法
在已知曲线函数方程y=f(x)的前提下,建立原等间距法拟合的数学模型,如图2所示。

图2 数学模型
已知函数起点A的坐标为(xA,yA),可通过计算得到A点的曲率半径RA:
(1)
为取得下一节点B的坐标(xB,yB),取一定值Δx,使得xB=xA+Δx,再根据函数表达式y=f(x),即可确定B点的坐标值。计算A、B两点之间的直线距离lAB:
(2)
下一步求解lAB与目标曲线之间的实际误差δ1。由于间距Δx的值很小,可将A、B间的目标曲线近似为一段以RA为半径的圆弧。MN为lAB的垂直平分线,因此可用线段MN的长度δ2代替实际误差δ1,且δ2>δ1。由图中三角形AMO为直角三角形可知:
(3)
由式(3)推导得:
(4)
设定允许误差δ允,若δ允≥δ2≥δ1,说明用A、B节点间的直线拟合目标曲线所产生的误差δ2在允许的误差范围之内,则B点为可靠节点。下一步以B点坐标为基础,采取同样的步骤获取下一点的坐标值,并计算误差是否在规定的误差范围内,直至结束。若误差过大,即δ2≥δ允,则减小间距Δx的值,以保证计算误差δ2满足要求。
2.2 优化的变间距法
用计算误差δ2i与允许误差δ允作商构造误差比率函数fi:
(5)
其中下标i代表相应节点的序号,如f1代表以起点开始计算第一点节点坐标时所产生的比率,δ21也就相应地代表计算第一个节点时所产生的误差。
选取适当的最低误差比率值,设为f0。为了保证合格节点的计算误差与允许误差相差不至过大,通常将f0取为靠近1的数,一般取f0=0.9。以下根据比率函数fi与f0的大小,分情况进行讨论。
当f0≤fi≤1时,说明所用间距Δx符合要求,误差δ2i在合理范围之内,计算所得的节点(xi,yi)是可靠的。
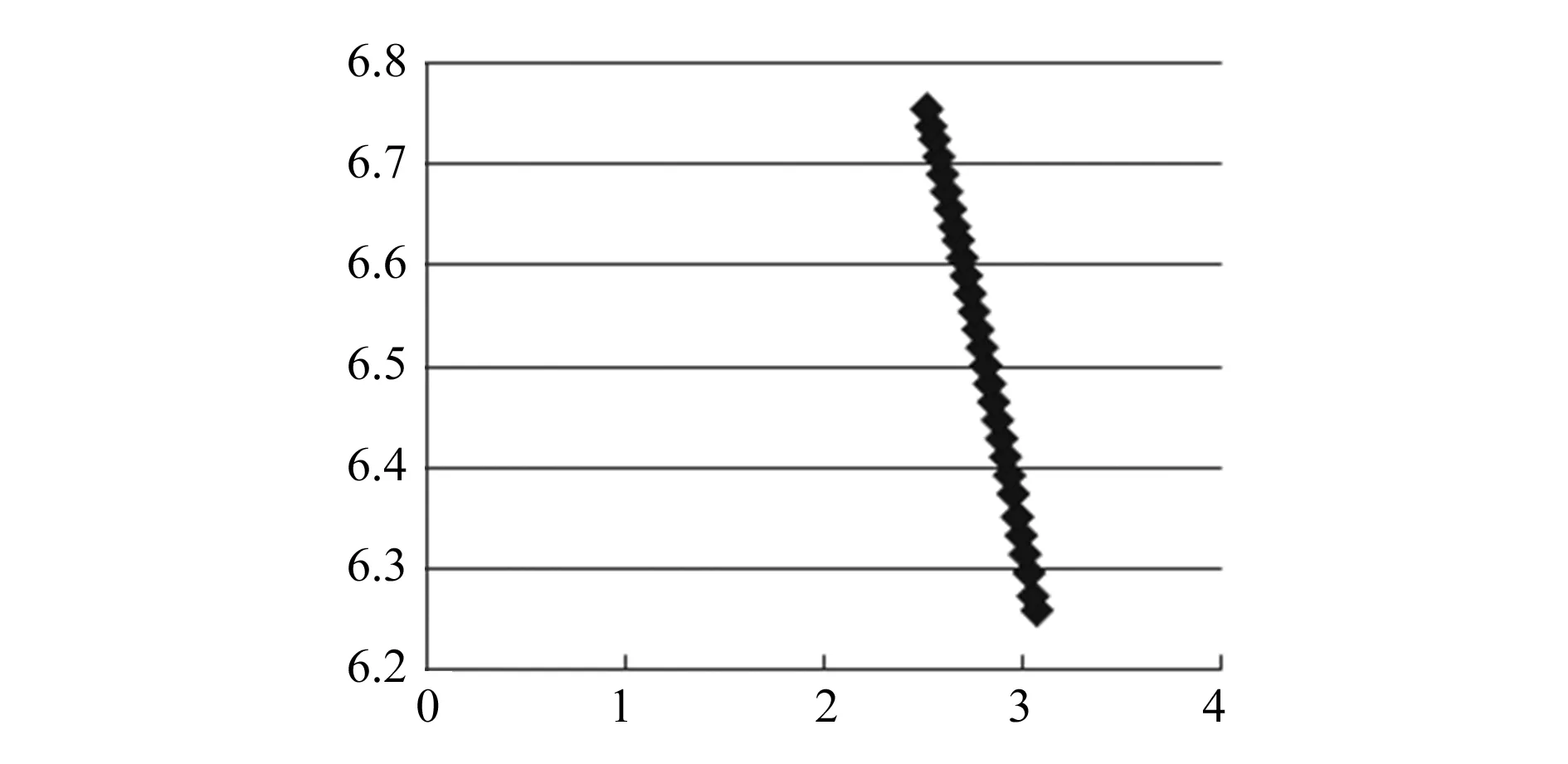
当fi Δx变=Δx·ε (6) 式中:ε为伸长系数,通常为大于1的数,一般在1.2~1.5之间。重新计算误差δ2i和比率函数fi,直至满足f0≤fi≤1。 当fi>1时,说明此时计算误差δ2i超过了允许的范围,适当减小间距Δx的值,令: Δx变=Δx·λ (7) 式中:λ为缩短系数,通常为小于1的数,一般在0.6~0.9之间。重新计算误差δ2i和比率函数fi,直至满足f0≤fi≤1。 确定新的节点坐标(xi+1,yi+1)之后,以该点为起点,并将上一间距Δx作为计算下一节点的间距,使每一节点都满足比率函数fi的要求。不断地重复以上计算过程,直至将目标曲线拟合完,得到所求节点的坐标值为止。 涡旋型线方程是角度的参数函数,在已知起点坐标的情况下,首先要做的是用MATLAB软件[6]计算起点坐标下对应的角度,获取角度后,运用MATLAB的求导函数diff按式(1)计算曲率半径。设初始间距Δx=0.02,计算下一节点的坐标;按照式(2)计算步长l。 取δ允=0.001,缩短系数λ=0.618,伸长系数ε=1.5。在MATLAB的编译环境[7]下,采用优化的变间距法,按照图3所示的流程进行编程。 在所有离散点的坐标计算出来后,将节点坐标导入Excel中,节点散点图如图4所示。 传统的等间距法中并没有本文提出的比率函数的计算过程,而是在整个计算过程中基于同一个间距计算节点坐标,因此会造成节点的数目过多。 设定同一允许误差δ允=0.001,用等间距法和优化的变间距法分别逼近该涡旋型线。如图4所示,由于节点比较密集,整体不好比较,故采用该涡旋型线内圈圆渐开线的初始部分进行比较。为方便比较统一精确到小数点后三位,其初始点坐标为 (3.077,6.625),截取段终点坐标为 (4.477,6.790),切向角范围为(0.75π,1.05π),两种方法的初始间距同设为Δx=0.02,其对应的节点坐标和间距见表1和表2。 图3 流程图 图4 节点散点图 采用优化的变间距法拟合所产生的间距是大于等间距法的。针对这一小段曲线,采用等间距法进行拟合需要30个节点,而采用优化的变间距法只需要20个节点即可。其节点坐标对比图如图5和图6所示。 表1 优化的变间距法的节点和间距 表2 等间距节点坐标 由于涡旋型线的曲率半径在逐渐增大,采用优化的变间距法所得拟合点之间的间距也会随之增大[8]。用等间距法拟合整段涡旋型线会产生21 467个节点,而采用优化的等间距法会产生14 354个节点,减少近1/3。 图5 等间距法节点 图6 变间距法间距节点 采用变间距法拟合涡旋型线,不但计算数学模型简单,而且在拟合的过程中能使节点的数目尽可能地减少,节点数目的减少会使得加工工序减少,从而提高数控机床的加工效率。可见,变间距法是一种比较好的拟合方法,具有一定的实用价值。 参考文献: [1] 程哲铭,欧阳新萍,雷蓉.涡旋式压缩机涡旋型线的研究综述与前景[J].流体机械,2015(1):51-56. [2] 孙永吉,刘涛.基于AdvantEdge的高速铣削合金铸铁涡旋盘的机理分析[J].制造技术与机床,2016(9):120-125. [3] 刘涛,邬再新,芮执元. 一次曲率半径函数涡旋重构型线动力学特性[J]. 农业机械学报,2011(3):213-218. [4] 王霞琴. 新型涡旋压缩机涡旋盘的数控加工[D].兰州:兰州理工大学,2014. [5] 倪春杰,姚振强,张立文. 用等间距法直线逼近非圆曲线[J]. 机械设计与研究,2010(5):17-19. [6] 刘涛,邬再新,刘振全. 法向等距线法生成涡旋压缩机型线的研究[J]. 机械工程学报,2004(6):55-58. [7] 刘慧颖. MATLAB R2007基础教程[M]. 北京:清华大学出版社, 2008. [8] 朱虹. 基于等误差直线拟合优化算法的非圆曲线加工技术研究[J]. 制造业自动化,2013(2):75-77,82.3 优化的变间距法拟合涡旋型线
3.1 利用MATLAB软件辅助计算
3.2 新旧方法的比较





4 结束语