基于ANN和动应变的梁桥移动荷载识别及试验*
2018-05-04李奉阁闫维明何浩祥
杨 慧, 李奉阁, 闫维明, 何浩祥
(1.北京工业大学工程抗震与结构诊治北京市重点实验室 北京,100124) (2.内蒙古科技大学建筑与土木工程学院 包头,014010)
引 言
桥梁作为交通生命线工程的重要组成部分,在运营状态下不断承受交通荷载,易发生性能退化和疲劳破坏。因此,需要对桥梁服役状态下的车辆荷载进行监测。正确识别桥梁结构的实际受力状况,是进行其他分析的前提和基础。同时,对车辆荷载信息进行统计识别可以获得车辆荷载谱,进而为桥梁结构安全评估、全寿命分析、维修决策和桥梁优化设计提供有效的参考和依据,具有重要的科学和工程意义。
目前常用来测量车载的仪器是动态称重设备[1],在应用时,要提前安装在车辆经过的路面上,该仪器价格昂贵,仅能给出静力轴重,不能得出荷载随时间的变化历程。随着压电薄膜和石英晶体等新型传感器的发展,研究者开展了采用相关传感器识别桥梁车载的方法,并取得较好效果[2]。然而,在布设该类传感器时需要开挖路面,这会对桥梁带来一定损害,且荷载的识别精度容易受到传感器施工工艺的影响。从理论上看,通过车辆过桥时桥梁的响应来对车辆荷载信息进行识别,具有成本低、使用方便且能同时监测桥梁使用状态的优点,日益受到重视。目前常用的相关方法有时域法、频域法、有限元法以及奇异值分解法[3-8]等。但由于桥上移动荷载识别的复杂性,且属于典型的病态反问题[9],使得现有的基于振动方程求解的移动荷载识别理论在实际应用中仍存在很多问题,比如识别精度不高、识别稳定性较差等。作为经典的智能算法,人工神经网络拥有较强的逻辑推理能力,比较适合应用于结构荷载识别、损伤识别等力学反问题[10]。应用神经网络方法识别车辆动荷载时,只需通过桥梁的响应就能达到识别目的,且应用该方法不会对桥梁造成损伤,具有无损、经济的特点,因此受到很多学者关注。高宝成等[11]通过理论分析验证了神经网络用于结构荷载识别的可行性,但对识别方法研究不够深入。罗志玉等[12]提出了基于神经网络的移动常量荷载识别方法,但没有考虑动荷载的识别情况。李忠献等[13]提出了一种基于BP(back propagation,简称BP)神经网络的桥上移动荷载的分阶段识别方法,但由于试验中的车辆动荷载是未知的,因此仅采用车辆的静载作为输出目标对网络进行了训练,这与实际存在一定的差异。陈修辉[14]研究了用神经网络识别移动荷载的基本原理和实施步骤,并采用微粒群算法来优化网络权值,但其有效性尚需试验进一步验证。研究表明:将神经网络应用于移动荷载识别时需要确定有效的网络输入和输出、网络结构、激活函数及算法等,而这些参数对网络的准确性和稳定性均有重要影响。将神经网络应用于移动荷载识别时的重点和难点就是如何选择最适合的激活函数和网络算法以建立最优神经网络模型,并实现不同工况下桥上车辆荷载的准确识别。
笔者通过神经网络对移动车载进行识别时,分析了输入与输出的敏感性,研究了激活函数组合和训练算法对网络识别精度的影响,并通过试验验证了优化神经网络识别移动荷载的实用性和准确性。
1 车辆通过时桥梁的动响应分析
通过车辆过桥时的桥梁响应来识别车辆荷载信息,首先对移动荷载作用下的简支梁桥动力响应进行分析。如图1所示,对于长度为l的等截面简支欧拉梁,当有一速度为v、大小为P(t)的荷载通过时,其振动方程可写为
δ(x-vt)P(t)
(1)
求解式(1)可以得到移动荷载作用下梁的挠度响应

(2)
其中:u(x,t)为时刻t时,距梁左端x处的挠度;m为单位长度梁的质量;EI为梁的抗弯刚度;c为梁的阻尼系数;δ(x)为狄拉克函数;ωD n和ωn分别为梁的第n阶有阻尼自振频率和无阻尼自振频率;ξn为阻尼比。

图1 移动荷载作用下的简支梁模型Fig.1 Simply supported beam subjected to a moving force
对于产生弯曲变形的梁截面,通过挠度响应u(x,t)可以得到梁底的应变响应ε(x,t)如下
(3)
梁体小变形时,略去式(3)中的高级小量,得
(4)
其中:yh为梁底到梁中性轴的距离;ρ(x,t)为时刻t时,距梁左端x处梁的曲率半径。
从式(4)可以看出,应变与梁体竖向挠度的二阶导数密切相关,因此对于移动荷载下的梁体,其主要截面的应变蕴含更丰富的高频分量信息,也更能充分反映结构的变形特性。在不考虑噪声影响的情况下,应变应该比挠度更能全面地反映荷载的参数信息,在实际桥梁移动荷载识别中可对不同截面的应变进行采集和分析,从而更精准地预测荷载的位置及幅值。为了进一步验证上述观点,采用有限元方法模拟移动荷载下简支梁的动力响应,并对主要截面的挠度和应变进行分析。有限元中取梁的长度L=30 m,截面面积S=1.923 m2,抗弯刚度EI=2.5×1010N·m2,密度ρ=2 600 kg/m2。将梁体划分为300个单元,采样频率为100 Hz,模拟了荷载分别为392 kN和794 kN、以20 m/s的速度过桥时,梁上8分点处的挠度和应变响应。
图2~图5为荷载在桥上不同位置时对应的梁上8分点处的挠度和应变响应。从图上可以看出,桥上车辆荷载的大小和位置都对桥梁的应变和挠度有影响,而且荷载越靠近测点梁的应变和挠度越大。同时,挠度和应变对荷载大小的敏感性相差不大,但应变对荷载位置更敏感。因此,本研究选择桥梁的动应变进行移动荷载的参数识别。

图2 荷载为392 kN时各测点的挠度曲线Fig.2 Deflection curve under the load 392 kN

图3 荷载为794 kN时各测点的挠度曲线Fig.3 Deflection curve under the load 794 kN
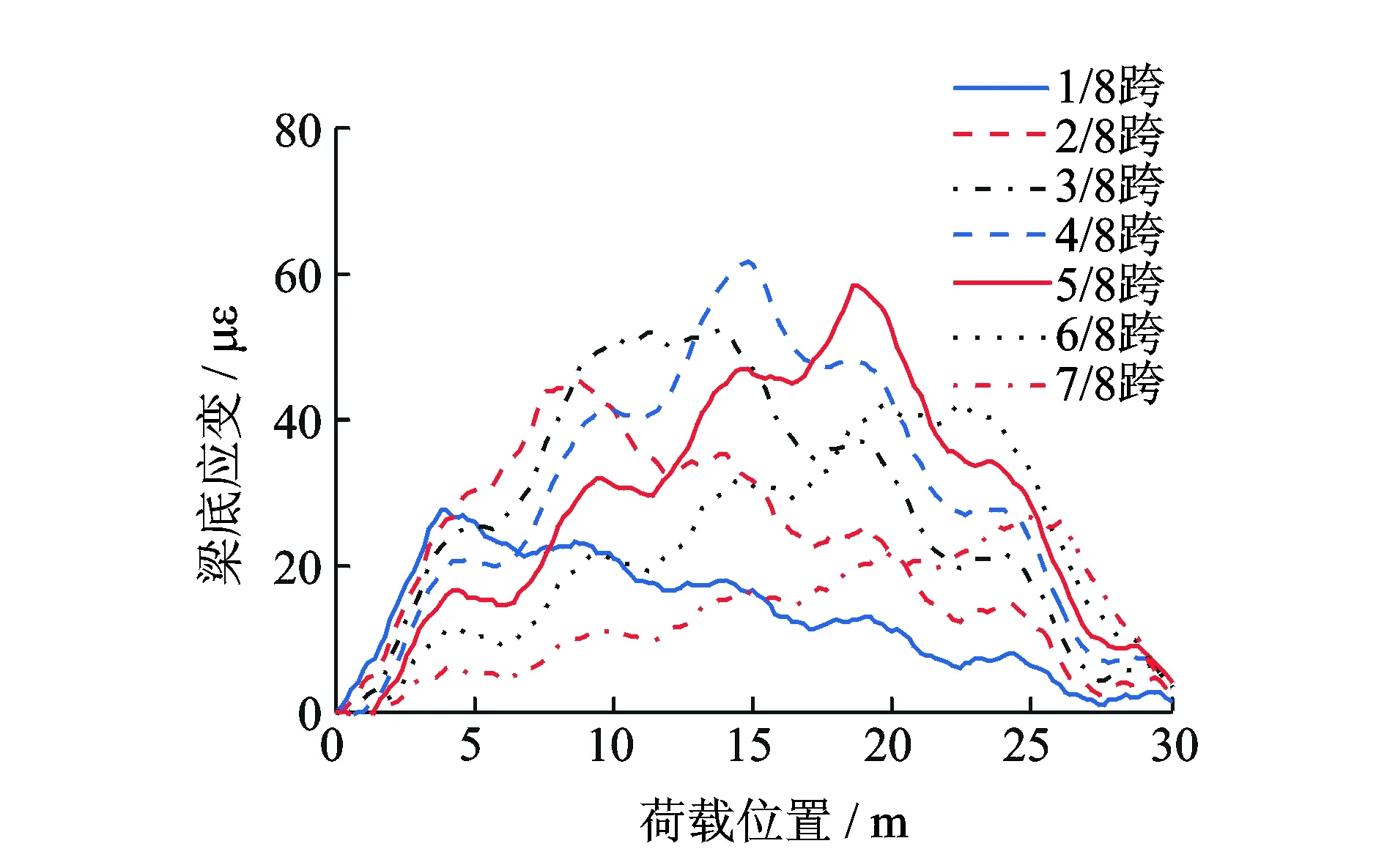
图4 荷载为392 kN时各测点的应变曲线Fig.4 Strain curve under the load 392 kN
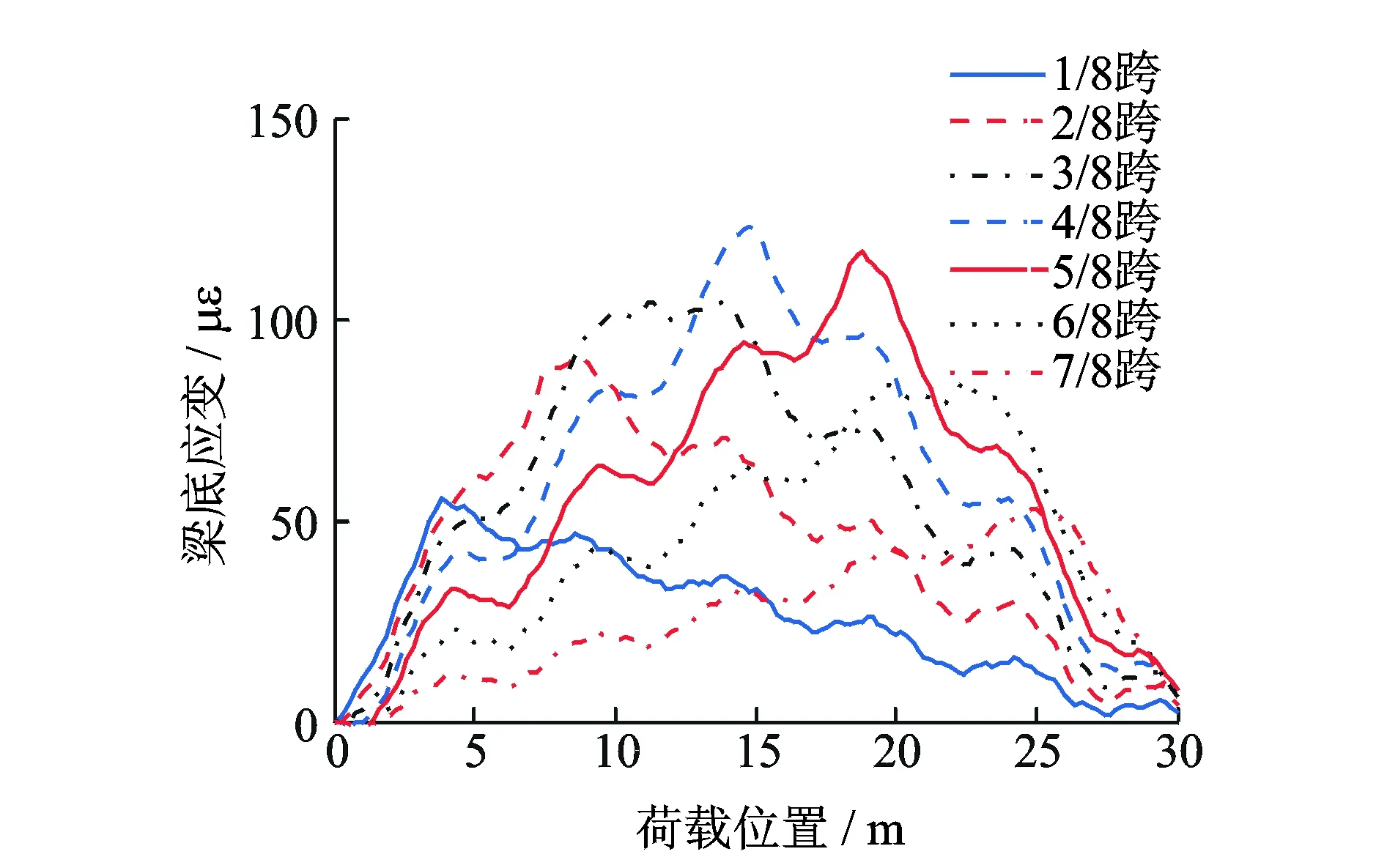
图5 荷载为794 kN时各测点的应变曲线Fig.5 Strain curve under the load 794 kN
2 BP神经网络识别桥梁移动荷载
根据结构的动态特性和实测动力响应求解结构的动载荷,属于结构动力学中的第二类反问题[15]。由于桥梁结构的复杂性以及车辆通过桥梁时的多样性和时间、空间分布的不确定性,使得通过车桥耦合振动,利用桥梁响应反推桥上荷载信息变得很困难,主要是存在模型误差和不适定性问题。人工神经网络具有强大的自适应学习能力和非线性映射能力,应用神经网络无需建立复杂的数学模型即可实现由Rn空间(n为输入节点数)到Rm空间(m为输出节点数)的高度非线性映射[16],这在解决移动荷载识别方面具有很大优势。将人工神经网络应用于桥梁荷载识别的关键在于神经网络的设计构造,主要包括网络样本的选择与处理、网络拓扑结构、激活函数及算法的选取等问题。笔者将较常用的BP神经网络应用于桥梁移动荷载参数识别,以简支梁为例,分析挠度和应变对荷载的敏感性,探讨不同激活函数和算法对网络的影响,并对识别结果进行分析。
2.1 训练样本库的建立
用ANSYS模拟计算桥梁在移动荷载作用下梁底8分点处的应变值。考虑常见车辆的尺寸、轴重,并对其进行合理简化,在计算桥梁响应时车辆的轴距分别取为3,4,5和6 m,轴重分别取为2 940,7 840,1 1760和19 600 kg,前后轴重比均为1∶1,速度分别取为5,10,20和25 m/s。为了用尽可能少的样本数量得到高效的网络,根据文献[17]采用L16(43)正交表来确定样本集进行训练。应变响应的采样频率为100 Hz,总采样时间为54.14 s,得到16组车辆通过时梁的响应,其中60%用于训练,20%用于验证,20%用于测试。
2.2 网络的结构分析与设计
应用BP神经网络对车辆荷载进行识别时,取输入层的节点数等于测点数,输出层的节点数等于待识别荷载的参数数目。由于本研究采用了7个应变片采集桥梁的应变数据,因此,输入层的节点个数取为7。在识别荷载位置时,网络输出为车辆前后轴的位置,所以输出层的节点数为2。由于车辆位置和车辆荷载大小都对桥梁的响应有影响,因此,在识别车辆荷载大小时,将识别出的荷载位置信息加入到输入数据中,此时输入层的节点个数为9,输出层的节点数仍为2。
在确定网络隐含层层数时,由于桥梁动应变响应与车辆荷载参数间的映射具有复杂性和不连续性,因此网络的隐含层层数取为2。在确定网络各层节点数时,根据文献[18],对几种不同的节点数组合进行了比较,确定了误差最小的组合,最后将组合7∶21∶10∶2作为识别车载位置时的网络节点组合,将组合9∶21∶10∶2作为识别车载大小时的网络节点组合。
2.3 激活函数和网络算法的确定
BP神经网络的激活函数有logsig和tansig函数,常用的训练算法主要有traingd,traingdm,traingdx,trainbfg,trainrp和trainlm。为了对比不同激活函数组合和算法对网络性能的影响,并得到最好的网络结构,文中对所选样本进行了训练,并对网络的目标输出和实际输出做了线性回归,最后根据它们之间的相关系数、训练时间以及均方差来判断网络的好坏,得到的对比结果见表1和表2。从表1可以看出:训练的收敛时间随激活函数组合的不同而变化,且均方误差值随收敛时间的增大而减小;相关系数受不同激活函数组合的影响不大;训练时间与迭代次数无关,这说明用不同的激活函数对网络进行训练时,其初始阈值和权值都是随机产生的,在训练过程中误差的降低方向也是变化的。经过综合对比表1中的各项参数,本研究在后续的计算中将tansig和logsig分别作为第1隐含层和第2隐含层的激活函数。
表1 采用不同激活函数组合的网络训练情况
Tab.1 Effects of different activation functions on the network
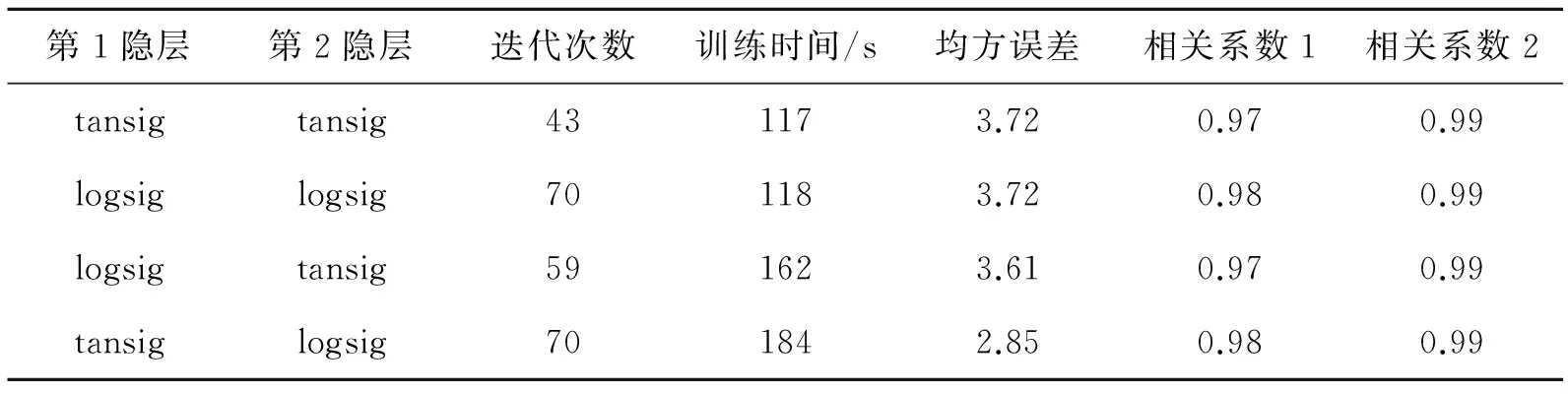
第1隐层第2隐层迭代次数训练时间/s均方误差相关系数1相关系数2tansigtansig431173.720.970.99logsiglogsig701183.720.980.99logsigtansig591623.610.970.99tansiglogsig701842.850.980.99

表2 采用不同的训练方法的网络训练情况
从表2可以看出,网络精度受训练算法的影响很大,traingd和traingdm方法在训练初期就使结果陷入局部最小,导致训练失败。而其他几种优化的训练算法,能够训练成功,但在迭代次数、训练时间、均方误差值上具有较大差异,相关系数的差异较小。综合对比表2中的数据,本研究在以后的计算中应用trainlm方法对网络进行训练。
2.4 网络精度评价
为了评价网络对移动荷载的识别效果,采用网络正确识别率,即相对误差小于等于10%的样本数在总样本数中所占的比例,作为网络优劣的评价指标。网络的相对输出误差为网络的实际输出与理想输出向量之间的距离与理想输出向量的范数之比[19],即
(5)
其中:m为测试样本的数量;yi和ti分别为第i个测试样本的实际输出和理想输出。
3 识别结果分析
3.1 恒载识别结果
图6和图7分别为一辆车的前后轴位置识别效果,当车辆不在桥上时,其位置为0,当车辆在桥上时,输出结果为荷载距桥左端的距离。从图上可以看出,除了在车辆上下桥时出现了较小偏差外,识别出的位置曲线与真实的位置曲线很接近,因此为了提高车辆速度的识别精度,可用车辆完全在桥上时的位置信息来计算车辆速度。另外,从图6和图7中还能确定车辆前后轴的上下桥时间,说明通过神经网络也可以对车辆是否在桥上进行判别。
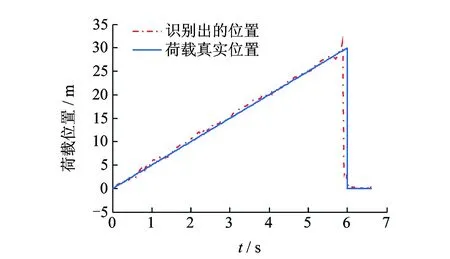
图6 车辆前轴位置识别结果Fig.6 Identified position of the front axle
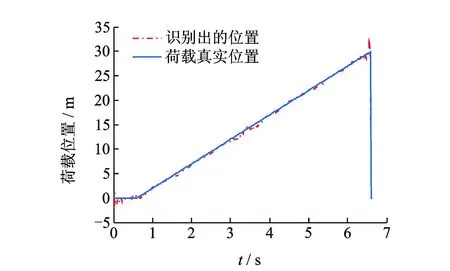
图7 车辆后轴位置识别结果Fig.7 Identified position of the rear axle
在对车辆的轴距进行识别时,可通过将识别得到的车辆前轴位置减去车辆后轴位置实现。为了减小误差,选取车辆完全在桥上时的数据对轴距进行识别,识别效果见表3。可以看出,不同工况下车辆轴距的识别精度相差较大,大致规律是轴距识别精度会随轴距的增大而提高,随速度的增大而减小。
表3不同轴距和速度下的轴距识别合格率
Tab.3Correctrecognitionrateofwheelbaseindifferentspeeds%
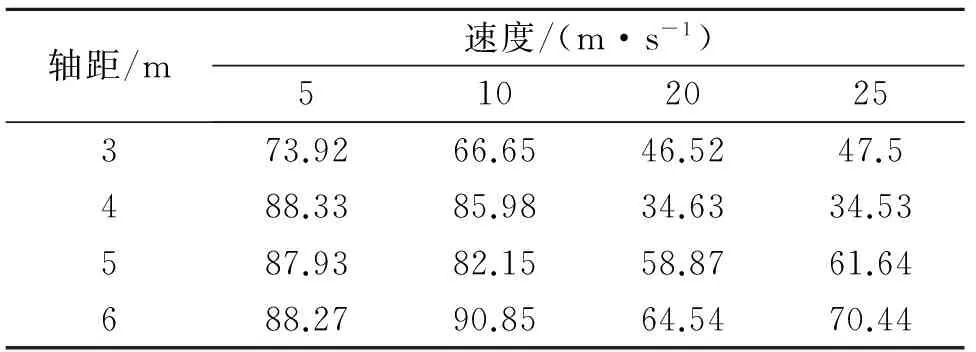
轴距/m速度/(m·s-1)5102025373.9266.6546.5247.5488.3385.9834.6334.53587.9382.1558.8761.64688.2790.8564.5470.44
车辆过桥时,桥梁的响应与荷载的位置和大小有关,因此识别出车辆位置后,就可以根据桥梁的响应与识别出的位置信息得到车辆的荷载信息。即将车辆过桥时的桥梁应变响应和识别得到的车辆位置信息输入训练好的网络,得到车辆前后轴轴重时程。图8和图9为识别得到的车辆前后轴结果,可以看出,车辆的轴重在上下桥附近精度稍差,而车辆完全上桥后识别精度较好,而且从图中可以对车辆是否在桥上的状态作出判断。
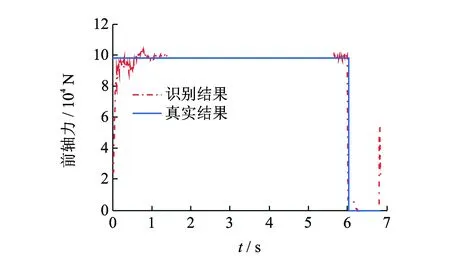
图8 前轴荷载识别效果图Fig.8 Identified value of the front axle load
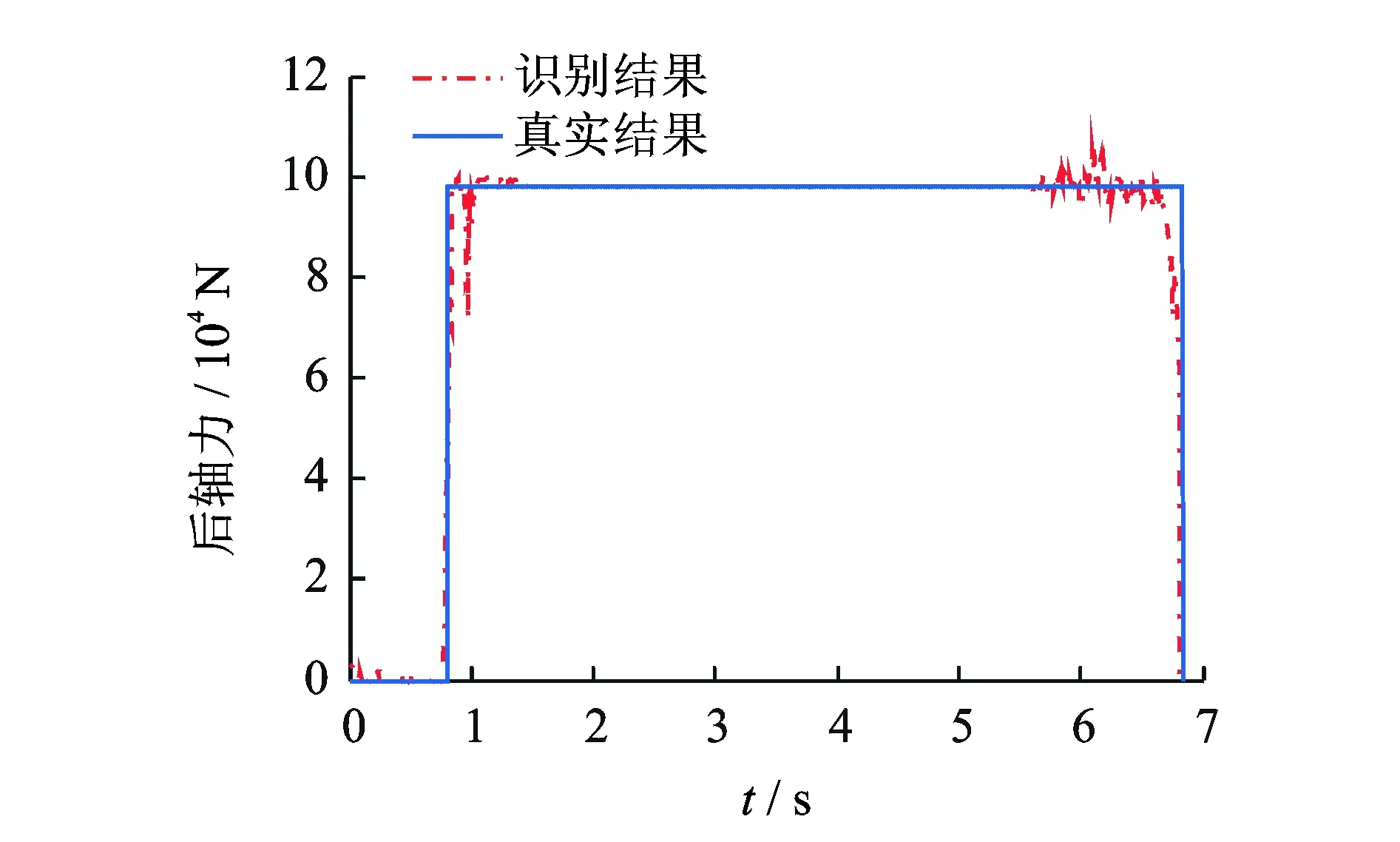
图9 后轴荷载识别效果图Fig.9 Identified value of the rear axle load
表4给出了不同工况下网络对车辆荷载的正确识别合格率。可以看出,各工况下网络的识别合格率都大于60%,说明该网络对车辆荷载的识别效果较好[20]。车辆的速度可以通过拟合车辆完全在桥上时的位置点得到。表5给出了不同工况下的速度识别效果,其中识别的最大相对误差为2.7%,出现在速度为25 m/s、轴距为6 m时。总体来说,速度的识别精度随轴距和速度的减小而增大。
表4不同轴距和速度下的荷载识别合格率
Tab.4Correctrecognitionrateofloadvaluewithindifferentwheelbaseandspeed
%

轴距/m速度/(m·s-1)5102025前轴后轴前轴后轴前轴后轴前轴后轴376.2068.6783.1381.0285.5479.5287.9786.47485.9685.8274.2766.6776.6175.4481.7575.18581.8281.1183.2483.3160.2366.4872.3468.79679.2871.6978.4579.2881.2279.5653.7960.69
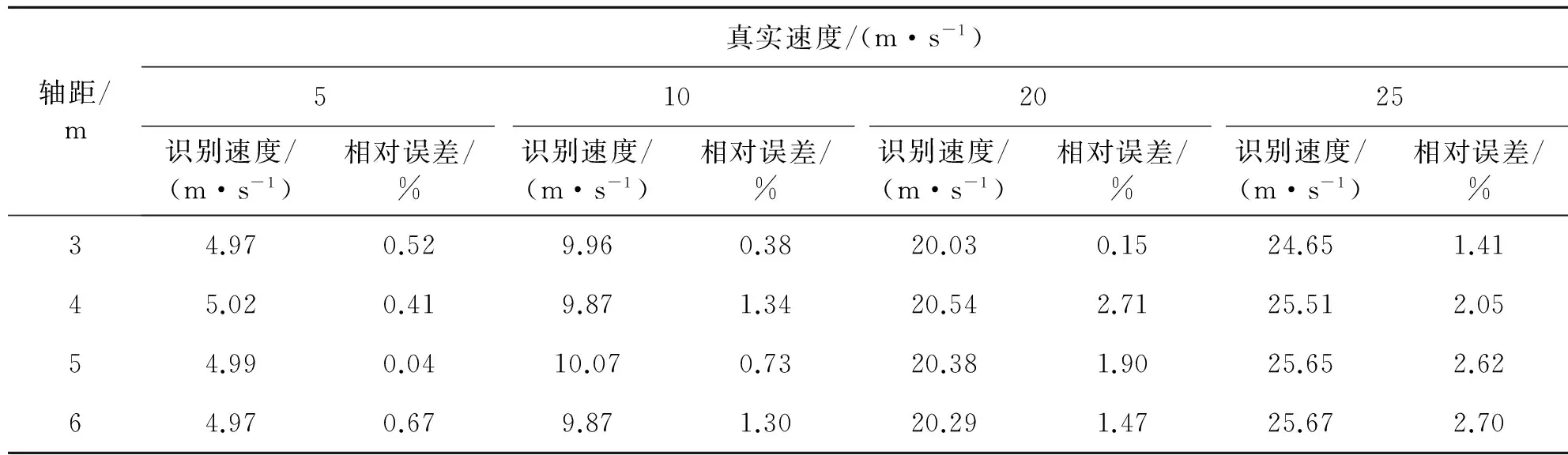
表5 不同轴距下车辆速度识别结果
3.2 动荷载识别结果
为验证网络对动荷载的识别效果,对两个速度为v=10 m/s,大小为P=39.2×(1+0.15×cos(13.35t)) kN,相距6 m的时变移动力进行了识别。图10和图11为识别结果。可以看出,前轴的识别结果明显好于后轴,并且识别出了力的频率变化。

图10 未加噪声时前轴荷载识别效果Fig.10 Identified the front dynamic axle load
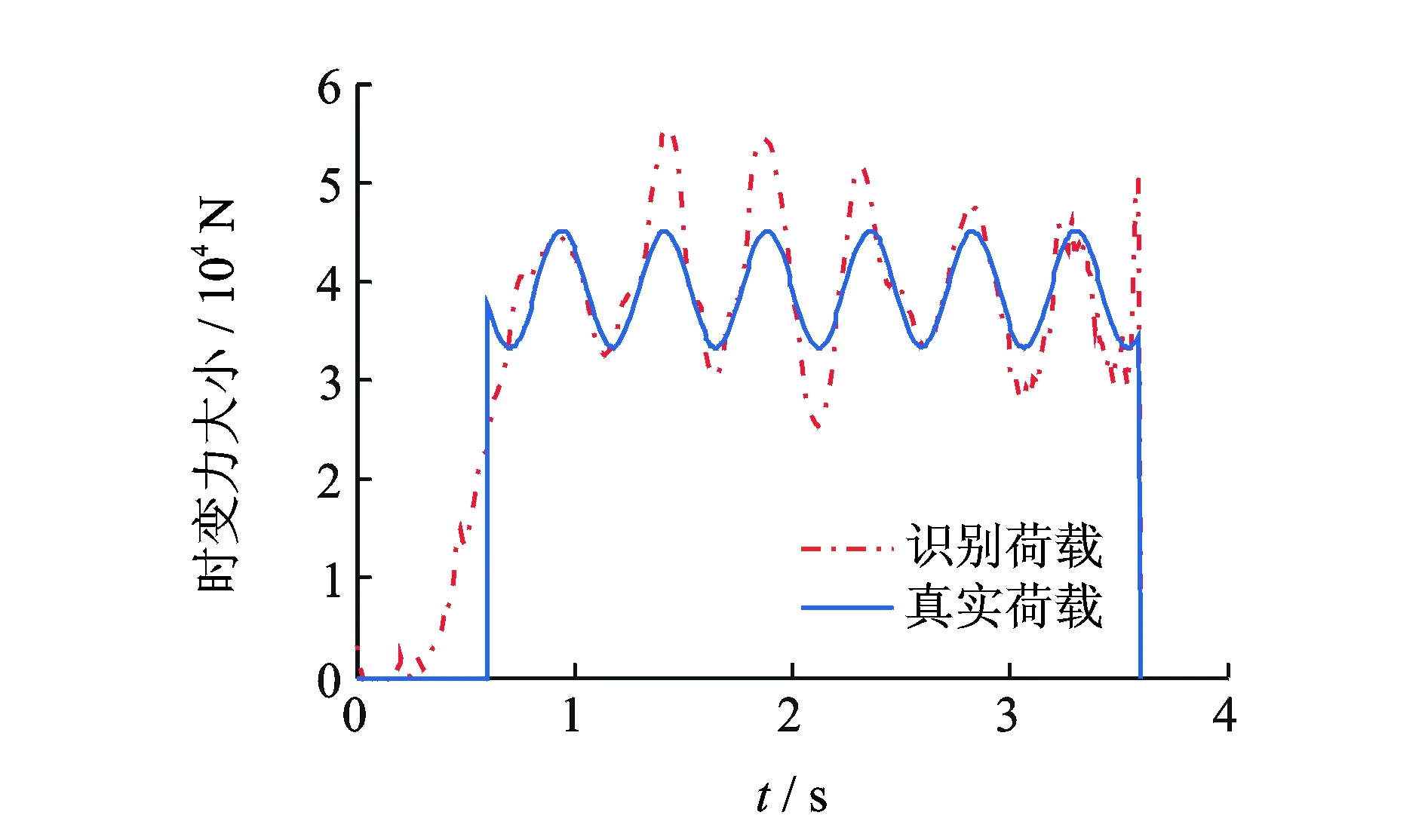
图11 未加噪声时后轴荷载识别效果Fig.11 Identified the rear dynamic axle load
在样本中加入不同级别噪声,分析了噪声对识别效果的影响,见表6。结果表明网络识别精度受噪声影响较明显,当噪声水平为15%时,正确率已经难于满足应用要求,而经过带通滤波处理后,正确识别率得到明显改进,且改进效果随噪声水平提高而愈加显著。
表6噪声对网络识别精度的影响
Tab.6Effectofdifferentnoiselevelsonrecognition
%
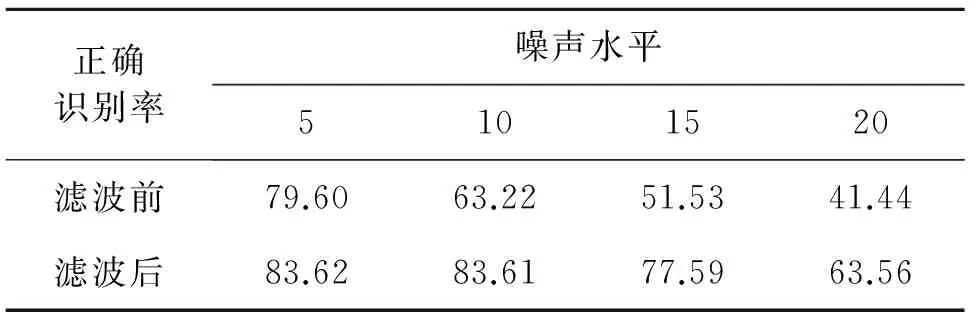
正确识别率噪声水平5101520滤波前79.6063.2251.5341.44滤波后83.6283.6177.5963.56
4 试 验
为了进一步考察应用神经网络识别移动荷载的实用效果,制作了桥梁实体模型并进行了动力分析。试验模型尺寸如图12所示。其中主梁为简支梁,梁长2 m,高1 cm,宽15 cm,弹性模量E= 2.07×1011N/m2,转动惯量I=1.295×10-8m4,密度ρ=7 850 kg/m3。模型车为双轴,中间通过木板连接,车上绑定铁块作为配重。在主梁梁底8分点处布置7个应变片,如图12所示,用以采集模型车通过时主梁的应变响应。主梁两端设置导梁和尾梁用于小车的加速和减速,导梁和尾梁的连接处存在较小缝隙,为了减小模型车上下桥时的冲击,在缝隙中填满了泡沫塑料。为得到模型车的速度,在模型车上安装了一个粘有应变片的钢片,并在模型主梁的一侧等间距焊接了9根短钢筋,当模型车通过模型梁时,车上的钢片就会击打梁上的短钢筋,每次击打都会在应变片电压时程曲线上出现峰值,这样通过短钢筋间的间距和应变片电压信号的跳动就可以得到模型车的速度。试验时,通过绳子牵引小车多次通过模型梁,同时采集主梁的应变响应,最后选取速度均匀的工况进行荷载识别。
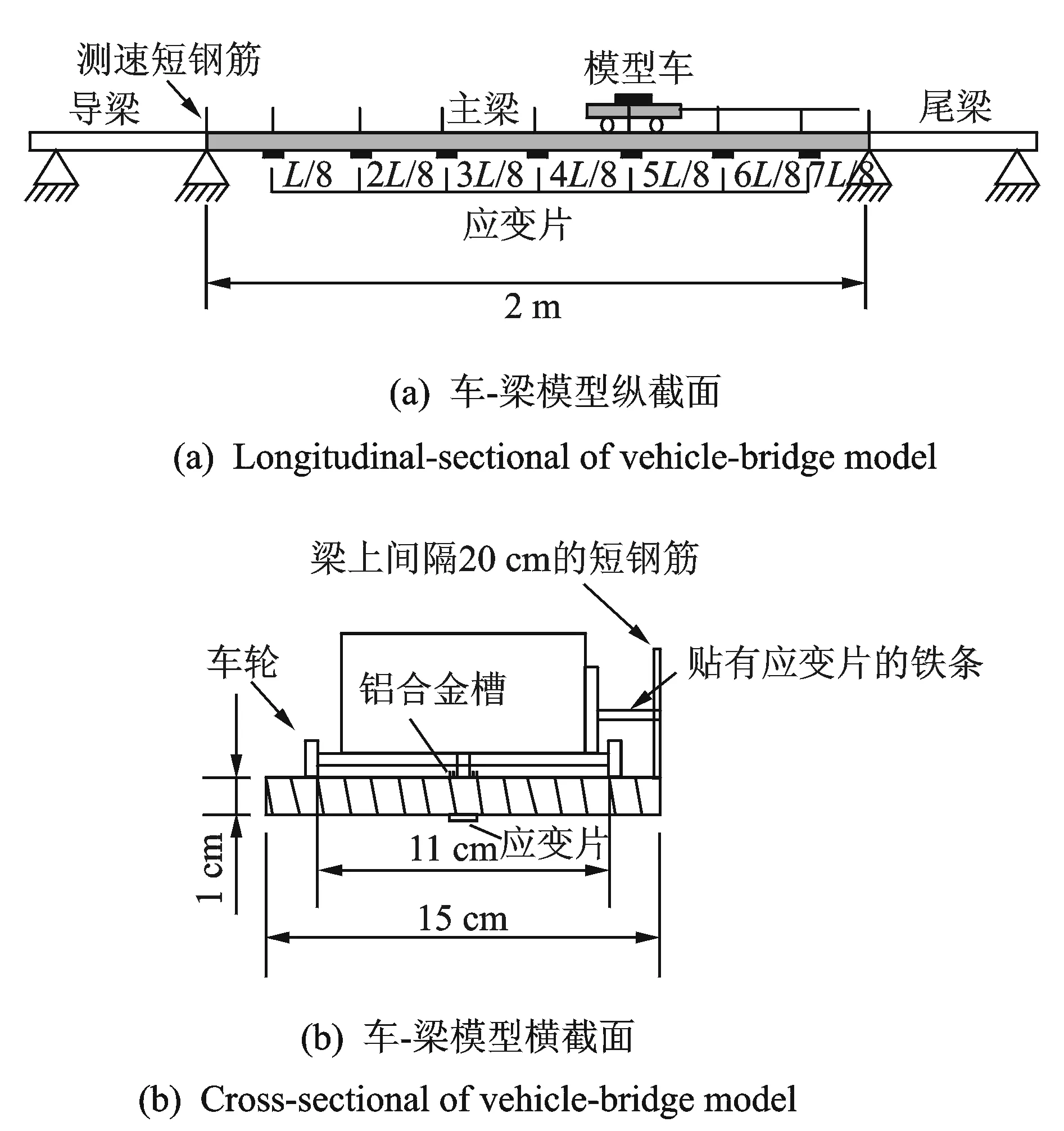
图12 模型布置Fig.12 Experiment setup

图13 模型梁和模型车Fig.13 Model beam and model vehicle
图13为试验中用到的模型车和模型梁,为了保证模型车在模型梁上直线行驶,在模型梁的上表面粘了一个U型铝槽用以引导模型车。试验中模型车车速0.25 m/s,静荷载为9.38 kg,前后轴重比1∶1,轴距为25 cm,采样频率为1 000 Hz。图14为模型车通过模型主梁时梁底各个测点的应变时程曲线,可以看出图14中各测点处应变随模型车与测点的相对位置而发生变化。当模型车行至测点附近时,该处的应变时程曲线达到峰值点,而且对称测点处的应变时程曲线基本对称,这说明采集到的应变数据合理可用。
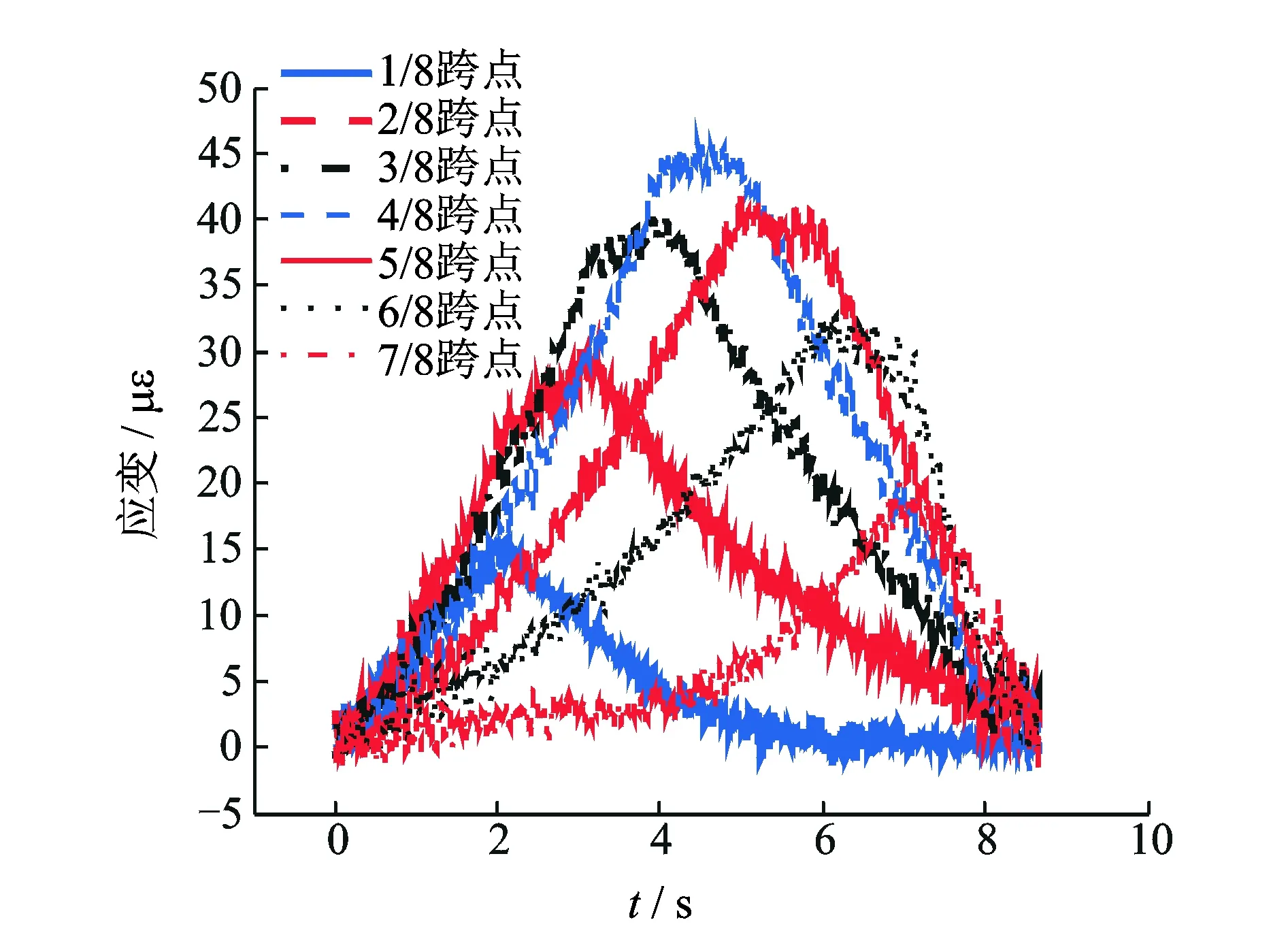
图14 模型梁8等分点处动应变测量的一个样本Fig.14 A sample of dynamic strain responses
由于试验中模型车的动荷载无法知道,这样对网络训练时就没有合理的目标输出。因此,通过有限元软件ANSYS对模型车以不同荷载和速度通过时的模型梁应变响应进行了模拟,用各工况下模拟得到的数据做样本对网络进行训练。图15为试验与模拟的跨中应变的对比,可以看出模拟效果良好。得到模拟数据后,按照前文所述方法对网络进行训练,然后用满足要求的网络对车重为9.2 kg、车速为0.35 m/s、前后轴重比为1∶1的荷载进行了识别。

图15 实测与模拟的跨中应变对比Fig.15 Measured and simulated strain of mid-span
图16和图17分别为模型车的前后轴位置识别效果,可以看出,前轴的位置识别结果较好,但当车辆行驶至跨中附近时,结果出现了较大的偏差点。后轴的位置识别效果稍差。在模型车上下桥时,模型车前轴上桥时间识别较准确,而识别出的模型车前轴和后轴出桥时间较实际偏早,识别出的后轴上桥时间较实际偏晚,这应该是模型车在距离梁的支座较近时,响应数据的信噪比较小导致的识别偏差。
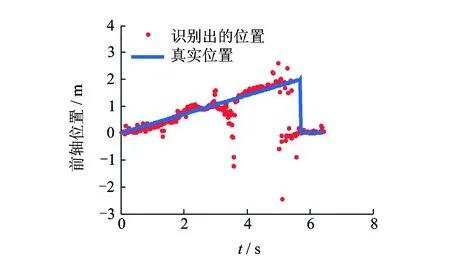
图16 模型车前轴位置识别效果Fig.16 The position identification results of front axle

图17 模型车后轴位置识别效果Fig.17 The position identification results of rear axle

图18 模型车前轴荷载大小识别结果Fig.18 The front axle force identification results
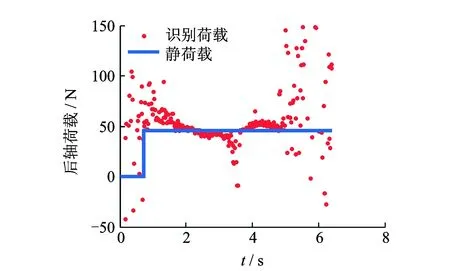
图19 模型车后轴荷载大小识别结果Fig.19 The rear axle force identification results
图18和图19是模型车前后轴轴重的识别效果。可以看出,识别出的模型车轴重围绕其静荷载上下波动,在模型车刚上桥时得到的轴重值远大于各轴的静载值,这主要是由模型车上桥时的冲击作用导致,当模型车完全行驶到梁上时,荷载的识别效果较稳定,这与实际也是相符的。
试验结果表明,通过神经网络对桥上移动车辆荷载的识别是可行的,应用车辆通过桥梁时的应变响应可以较准确地识别出车辆的位置和前后轴重。
5 结束语
笔者研究了通过BP神经网络以及桥梁动应变进行车辆荷载识别的方法,并通过模型试验对该方法的合理性和适用性进行了验证。结果表明,将BP神经网络用于桥上车辆荷载识别是可行的,该方法可以根据车辆过桥时的桥梁动应变响应对车辆的位置、速度、动荷载和轴距进行识别。在用BP神经网络进行车辆移动荷载识别时,网络的精度受激活函数组合的影响不大,受训练方法的影响较大。应用该方法对移动常量荷载的识别效果较好,对时变荷载的识别效果稍差,但仍能识别出荷载的大小,且具有良好的抗噪能力。应用文中的方法,只通过应变片就能达到识别移动荷载的目的,且不会对桥梁造成损伤,具有经济、方便的优点,值得在桥梁检测和健康监测系统中推广使用。
[1] Jason D, Eugene J, Arturo G. Adaptation of cross entropy optimisation to a dynamic bridge WIM calibration problem[J]. Engineering Structures, 2012,44:13-22.
[2] 褚祥诚,徐亚楠,袁松梅,等.基于PVDF的新型高速公路压电动态称重传感器[J].振动、测试与诊断,2013,33(3):351-357.
Chu Xiangcheng, Xu Yanan, Yuan Songmei, et al. A novel WIM sensor for highway based on PVDF piezoelectric material[J]. Journal of Vibration, Measurement & Diagnosis, 2013,33(3):351-357. (in Chinese)
[3] 张青霞,段忠东,Lukasz J.结构损伤与荷载的快速同步识别方法研究[J].振动与冲击,2013,32(2):33-38.
Zhang Qingxia, Duan Zhongdong, Lukasz J. Fast simultaneous identification of structural damages and loads[J]. Journal of Vibration and Shock, 2013,32(2):33-38. (in Chinese)
[4] Law S S, Chan T H T, Zeng Q H. Moving force identification: a frequency and time domains analysis[J]. Journal of Dynamic Systems, Measurement and Control, 1999,121(3):394-401.
[5] Law S S, Bu J Q. Vehicle axle load identification using finite element method[J]. Engineering Structures, 2004,26(8):1143-1153.
[6] 陈震,余岭.基于截断GSVD方法的桥梁移动荷载识别[J].振动与冲击,2014,33(10):97-100.
Chen Zhen, Yu Ling. Identification of dynamic axle loads on a bridge based on truncated generalized singular value decomposition[J]. Journal of Vibration and Shock, 2014,33(10):97-100. (in Chinese)
[7] Deng Lu, Cai Chunshong. Identification of dynamic vehicular axle loads: theory and simulations[J]. Journal of Vibration and Control, 2010,16(14):2167-2194.
[8] 陈震,余岭.基于TGSVD的桥梁移动荷载识别及正则化矩阵选取[J].振动、测试与诊断,2015,35(1):24-29.
Chen Zhen, Yu Ling. Selection of regularization matrixes for moving force identification based on truncated generalized singular value decomposition[J]. Journal of Vibration, Measurement & Diagnosis, 2015,35(1):24-29. (in Chinese)
[9] 李忠献,王波,陈锋.桥梁移动荷载的识别与参数分析[J].福州大学学报:自然科学版,2005,33:56-61.
Li Zhongxian, Wang Bo, Chen Feng. Identification and parmaetric analysis of moving loads on bridges[J]. Journal of Fuzhou University: Natural Science, 2005,33:56-61. (in Chinese)
[10] Chen Q, Chan Y W, Worden K. Structural fault diagnosis and isolation using neural networks based on response-only data[J]. Computers & Structures, 2003,81:2165-2172.
[11] 高宝成,刘红霞,杨叔子.神经网络用于结构动荷载识别的研究[J].郑州工学院学报,1996,17(2):91-94.
Gao Baocheng, Liu Hongxia, Yang Shuzi. An investigation on the identification method of dynamic loads of constructure[J]. Journal of Zhengzhou Institute of Technology, 1996,17(2):91-94. (in Chinese)
[12] 罗志玉.人工神经网络法在桥梁荷载识别中的应用[D].上海:同济大学,2004.
[13] 李忠献, 陈锋,王波.基于BP神经网络的桥上移动荷载分阶段识别方法[J].工程力学,2008,25(9):85-92.
Li Zhongxian, Chen Feng, Wang Bo. A BP neural network-based stage identification method for moving loads on bridges[J]. Engineering Mechanics, 2008,25(9):85-92. (in Chinese)
[14] 陈修辉.基于神经网络的桥梁移动荷载识别[D].成都:西南交通大学,2009.
[15] Liu Guirong, Han Xu. Computational inverse techniques in nondestructive evaluation[M]. Boca Raton: Chemkal Rubber Company Press, 2003:19-26.
[16] Xu Bin, Wu Zhishen, Chen Genda, et al. Direct identification of structural parameters from dynamic responses with neural networks[J]. Engineering Applications Artificial Intelligence, 2004,17(8):931-943.
[17] 周毅,徐柏龄.神经网络中的正交设计法研究[J].南京大学学报:自然科学版,2003,37(1):72-78.
Zhou Yi, Xu Boling. Orthogonal method for training neural networks[J]. Journal of Nanjing University: Natural Sciences, 2003,37(1):72-78. (in Chinese)
[18] 马锐.人工神经网络原理[M].北京:机械工业出版社,2010:136-143.
[19] 金虎.基于人工神经网络的结构荷载识别与损伤识别研究[D].杭州: 浙江大学,2005.
[20] 吴大宏, 赵人达. 基于神经网络的混凝土桥梁荷载识别方法研究[J].中国铁道科学,2002,23(1):25-28.
Wu Dahong, Zhao Renda. Research on the method of load identification for concrete bridge based on neural network[J]. China Railway Science, 2002,23(1):25-28. (in Chinese)
