直升机上航磁仪磁补偿的质量研究与探讨
2018-05-03邓德伟
邓德伟, 石 岩, 吴 雪
(1.核工业航测遥感中心,石家庄 050002;2.中核集团 铀资源地球物理勘查技术中心(重点实验室),石家庄 050002)
0 引言
航空磁测不可避免地会受到飞机机动带来的干扰,为了提高磁力仪的测量精度,需要进行磁补偿[1-2]。磁补偿方法按补偿方式可分为2种:①硬补偿是依据飞机本身、磁场变化和飞行动作等因素而产生不同强度和不同方向的干扰场,将电子设备安装在磁探头附近,使其产生与干扰场的强度和方向相反的人工场,从而达到消除干扰场的目的;②软补偿获得飞机不同状态下的三分量磁矢量之后,根据事先标定的飞机磁干扰系数,实时或事后通过数值计算解析出磁干扰的大小,并加以去除的方法[3]。在软补偿中,根据飞机的姿态又可分为稳态磁补偿法,该方法是在一个选定点上空以不同方向通过时所取得的磁场绝对值数据,计算出受各种干扰场影响的各个分量,再一一进行补偿。这种方法有一个特点,要求磁补偿飞行时飞机的姿态需尽量保持平稳。与稳态磁补偿法对应的另一种方法是机动法(动态法),该种方法进行磁补偿飞行时,机体以一定幅度和周期做府仰、摇摆和翻滚等动作,根据动态情况下出现的磁场读数的相对变化,求得飞机永磁及感应磁干扰的各个分量,然后进行补偿[4]。
1 磁补偿原理
飞机干扰场与地磁场之和为光泵磁力仪探头测得的磁场值,磁总场表示为式(1)。
H=HTOT+He
(1)
其中:磁总场为一个矢量值,我们可以将磁总场的H横向分量(X分量)用T表示;磁总场的H纵向分量(Y分量)用L表示;磁总场的H垂直分量(Z分量)用V表示。其表达式为式(2)。
H2=T2+L2+V2
(2)
其三个方向的余弦表达式为:
cosX=T/H
(3)
cosY=L/H
(4)
cosZ=V/H
(5)
在野外实际测线飞行时,由于地型、天气和人员操作等因素,飞机本身的飞行姿态是复杂多变的,将这些复杂的姿态分解为3套基本动作,即侧滚、摇摆和俯仰,这样就出现了侧滚角(Ω)、摇摆角(Ψ)和俯仰角(λ);还有飞机所处在的地理位置的地磁偏角(ζ)和地磁倾角(η)。在不同姿态下对磁场值的影响是不相同的,这些变化的磁场值可以通过三分量磁通门磁力仪记录下来,然后根据这些变化的磁场值将每个分量计算出来。
1)飞机做侧滚动作时,且保持摇摆角Ψ和俯仰角λ为0°:
cosX=cosηsinζcosψ
(6)
cosY=cosηcosζ
(7)
cosZ=sinζcosψ-cosηsinζsinψ
(8)
2)飞机做俯仰动作时,且保持摇摆角Ψ和侧滚角Ω为0°:
cosX=cosηsinζ
(9)
cosY=cosηcosζcosλ+sinζsinλ
(10)
cosZ=sinηcosλ-cosηcosζsinλ
(11)
3)飞机做摇摆动作时,且保持俯仰角和侧滚角Ω为0°:
cosX=cosηsinζcos Ω -cosηcosζsin Ω
(12)
cosY=cosηcosζ
(13)
cosZ=sin Ω
(14)
4)当飞机平飞时,则俯仰角λ、摇摆角Ψ和侧滚角Ω均为0°:
cosX=cosηsinζ
(15)
cosY=cosηcosζcosα+cosηsinζsinα
(16)
cosZ=sinη
(17)
对于飞机的磁干扰场HTOT、Tolles和Lawson根据磁干扰产生的原因,将其分为恒定干扰场、感应场和涡流场三类[5-6]。
HTOT=HPERM+HIND+HEDDY
(18)
其中HPERM为飞机的永久磁性体对磁场产生的恒定干扰场,其计算表达式为式(19)。
HPERM=a1cosX+a2cosY+a3cosZ
(19)
其中:a1、a2、a3为恒定干扰场在X、Y、Z三个方向上的投影值。
HIND为飞机的软磁性物质对磁场产生的感应干扰场,其计算表达式为式(20)。
HIND=He(b1cos2X+b2cosXcosY+
b3cosXcosZ+b4cos2Y+
b5cosYcosZ+b6cos2Z)
(20)
其中:b1、b2…、b6为飞机感应干扰场在X、Y、Z方向和其他相类似作用项的投影值。
HEDDY为飞机的导电部件对磁场产生的涡电流场,涡电流场和飞行时的磁场穿过导电部件的磁通量的变化率成正比,其计算表达式为式(21)。
HEDDY=He[c1cosX(cosX)′+c2cosX(cosY)′+
c3cosY(cosZ)′+c4cosY(cosX)′+
c5cosY(cosY)′+c6cosY(cosZ)′+
c7cosZ(cosX)′+c8cosZ(cosY)′+
c9cosZ(cosZ)′]
(21)
其中:c1、c2…、c9为飞机涡流场在X、Y、Z方向和其他相类似作用项的投影值。
根据以上公式就可以通过磁补偿飞行时的三种姿态下测得的磁场值,将侧滚角α、摇摆角β和俯仰角λ、地磁倾角η和地磁偏角ζ计算出,然后代入cosX、cosY和cosZ的公式,最终计算出磁补偿恒定干扰场的系数、感应干扰场的系数以及涡流干扰场的系数。由于计算的过程比较复杂,在实际计算中都是使用仪器自带的磁补偿软件,通过实时或者事后处理的方法来完成[7]。
2 磁补偿飞行实例
2.1 航磁系统的配置
使用AS350-B3型直升机作为搭载平台,PICO公司航空磁力仪型号为Cs-3型高精度铯光泵磁力仪、DAARC500自动航磁数字补偿仪(包括Lamor频率计数器/处理器和补偿软件,TFM100G2型三轴磁通门磁力仪),并使用AGIS数据收录系统,能够接收和控制4个磁力传感器数据,能够实时控制、接收和记录所采集的各种数据—磁数据、GPS数据、雷达高度数据、气压高度数据和大气温度数据等。探头安装在飞机下方向前伸出的探杆上,测量地磁场总场强度。数据实时诊断,数据收录出现问题可以及时发现,数据图形显示,显示模拟曲线实时监测各参量的工作质量。磁补偿飞行结束后再使用PICO公司研发的与仪器配套的PeiComp及PeiFom软件进行事后补偿,飞机的实际改装如图1所示。
2.2 磁补偿飞行
磁补偿飞行对飞行区域、路径、速度以及飞行时动作的幅度大小、周期都有明确的规定,按规定完成磁补偿飞行是获取有效的磁补偿系数的必要条件。
1)磁补偿飞行区要求在磁场平稳且地形平坦地区进行,为此参考往年航磁资料以及地形图和地质图,将磁补偿飞行区选择在磁场变化小,地表为第四系,地形较为平坦且离地高度约为3 000 m的地区。

图1 飞机改装示意图Fig.1 Schematic diagram of aircraft modification modification

图2 磁总场及三分量磁通门磁力曲线图Fig.2 Curve of magnetic field and three component fluxgate magnetic

图3 磁补偿前后曲线、补偿值及磁通门相关系数的曲线图Fig.3 Curve of magnetic compensation before and after compensation value and flux gate correlation coefficient
2)沿正方形闭合轨迹飞行,飞行方向分别为测线方向和切割线方向,在每一个边上大致等距离完成三个姿态的飞行,即左右摇摆(摇摆角度为±10°)、偏航飞行(角度为±5°)、俯仰飞行(俯仰角±5°),每个姿态飞行动作3次到5次。三种姿态飞行及动作变换时,要求平稳,柔和,在飞机调换方向拐弯时,要求倾斜角度不能大于25°。
3)磁补偿结束后,按布设“十”字航线进行检查飞行,求取补偿后剩余方向差。
2.3 磁补偿效果评价
磁补偿效果的评价主要根据品质因数FOM值、补偿前、后的FOM值的比值IR、NORM值以及十字检查飞行方向差的大小来进行综合评价。另外也有用补偿前、后的标准偏差δu、δc,以及两者的比值IR来评价。
1)FOM值为四组飞行动作的干扰场的峰值之和,每组三个动作,共计12个峰值之和。图2为设计航向为295°,实际飞行为299°的切割线方向的磁总场及三分量磁通门磁力曲线,通过图2可以清楚地辨别三个动作的始末时间,及动作周期和频率,准确地计算出该航向三个动作的峰峰值,同理计算出其他三个航向的峰峰值。补偿后的FOM值要求小于2 nT,本次补偿前的FOM值为7.638 nT,补偿后FOM值为1.752 6 nT,IR为4.358 1。
2)NORM值是反映补偿困难系数的矢量的模,是与磁通门相关的一个系数,NORM值一般小于100,较高的值指示可能存在问题[8]。图3为299°的切割线方向磁补偿前后曲线、补偿值曲线及磁通门相关系数的曲线图,从图3中可以看出补偿后的磁力曲线光滑,干扰场基本消除,磁通门相关系数值也大幅度降低。本次补偿NORM值为1.262 6。
3)剩余方向差值。沿四个不同方向经过的同一个点的磁力值,在经过各项校正后的磁力值在理论上的差值应该为零,因此十字检查飞行剩余方向差值越接近于零,磁补偿效果越好。
经“十”字检查飞行,补偿后探头剩余方向差值较小,剩余方向差值最大值为0.51 nT(表1)。
通过以上三个参数的评价,本次磁补偿质量得到较好地控制,干扰场基本消除,补偿前、后整体效果如图5所示。
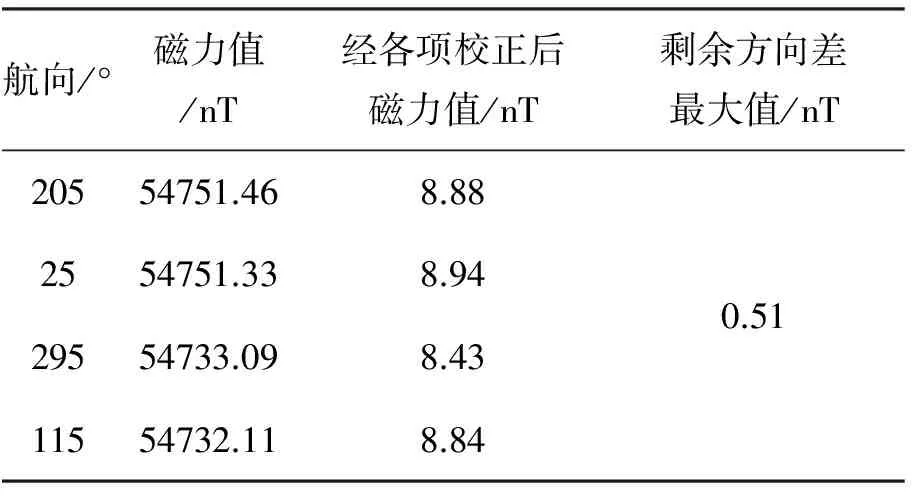
表1 剩余方向差值计算表

图4 磁补偿前后总场曲线对比图Fig.4 Comparison of total field curves before and after magnetic compensation
3 磁补偿飞行的思考与探讨
在本次磁补偿中,设计的飞行区域为在磁场平稳地区且离地3 000 km高度的正方形框,但从图4磁补偿前、后曲线图来看,磁场水平梯度仍然达到8 nT/km ~10 nT/km,即使单航向水平梯度也达到2 nT/km ~6 nT/km,这对飞机做三个动作产生的干扰场会有一部分的加成作用,因此对磁补偿飞行路径提出了如下改进方案。
3.1 路径的长度
由图2可以看出完成每个动作需要20 s~30 s的时间,而飞行时速按测线飞行速度约150 km/h计算(约40 m/s),完成一个动作的航线长度为0.8 km ~1.2 km,因此完成12个动作需要的航线长度为9.6 km~14.4 km,再加上每个动作之间的准备需要的航线,共计20 km,相比之前每条10 km长路径,实际只需要一半的路径即可完成。
3.2 路径的形态
以往飞行路径的设计思路为正方形方框,飞行方向分别为测线方向和切割线方向,考虑到磁场水平梯度对磁补偿的影响,设计飞行路径时应以磁等值线线圈为主,并在飞行做动作时尽量兼顾测线方向和切割线方向。笔者在之前设计的磁补偿框的周边地区,重新选取一磁场值为-40 nT,周长为27.5 km的等值线线圈作为磁补偿框,并设计好每个动作及动作之间准备的路径,实际设计路径如图5、图6所示。根据以上设计思路,对磁补偿前后△T曲线进行模拟(图7),磁场水平梯度基本消除,飞行动作的周期、频率清晰可辨,产生的干扰场在背景场值上、下浮动,补偿后干扰场得到消除,△T曲线基本回归背景场值。
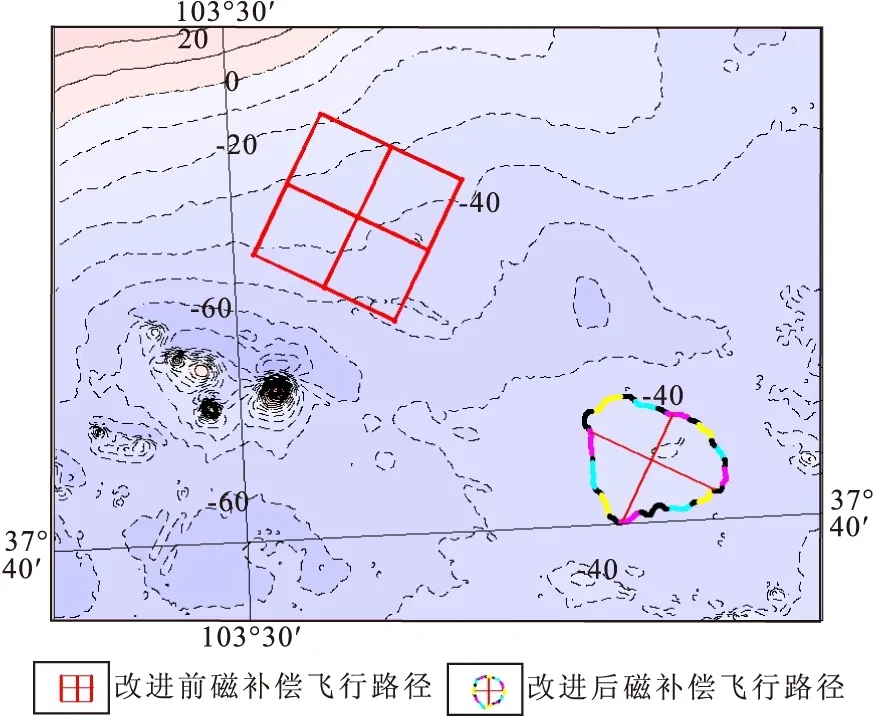
图5 改进前后的磁补偿路径对比图Fig.5 Comparison of magnetic compensation path before and after improvement

图6 改进后的磁补偿路径图Fig.6 Path diagram of improved magnetic compensation
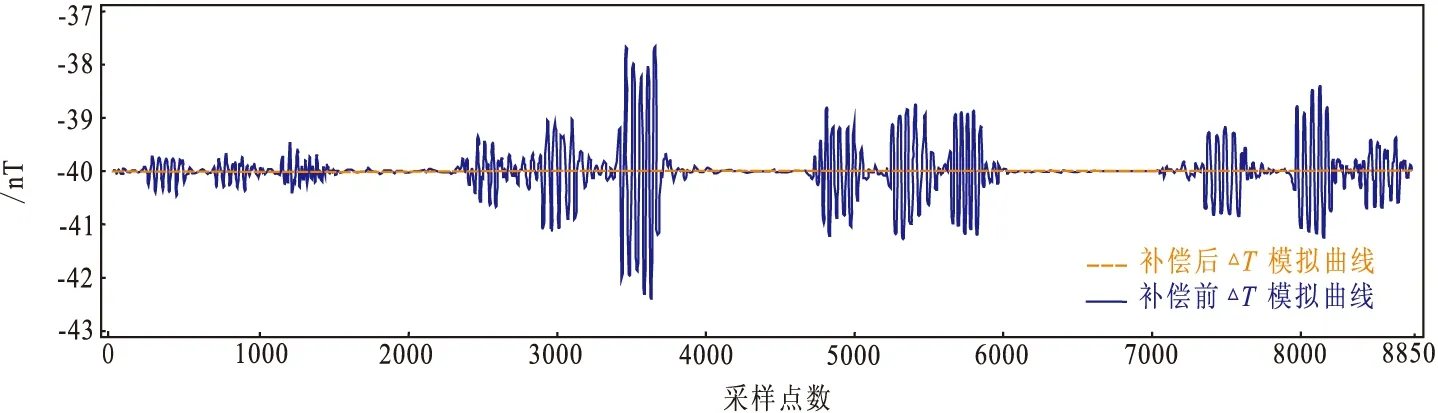
图7 补偿前后△T模拟曲线对比图Fig.7 Comparison of △T simulation curves before and after magnetic compensation
4 结论
经过磁补偿后,较好地消除了干扰场,提高了航空磁测的精度,给出的三个参数能准确地评价磁补偿效果。
通过对背景场梯度等因素的分析,提出了设计磁补偿飞行路径时,应以磁等值线线圈为主,且尽量兼顾测线方向切割和线方向的新思路,并从模拟的磁补偿前、后△T曲线可以看出,背景场水平梯度基本消除,相较以往更清晰、直观地反应出干扰场的消除情况。
参考文献:
[1] 王景然,卢立波,刘浩,等.贝尔直升机航磁仪磁补偿结果分析[J].海洋测绘,2013,33(6):11-13.
WANG J R,LU L B, LIU H,et al. The magnetic compensation analysis of the aeromagnetic instrument on the bell helicopter[J]. Hydrographic Surveying and Charting,2013,33(6):11-13.(In Chinese)
[2] 刘晓杰.航磁补偿技术研究[D].长春:吉林大学,2009.
LIU X J.Study on aeromagnetic compensation technique[D].Changchun: Jilin University,2009. (In Chinese)
[3] DZT.0142-2010, 航空磁测技术规范[S].
DZT.0142-2010,Criterion of aeromagnetic survey[S].(In Chinese)
[4] 曾佩韦.机动式航磁补偿法[J].长春地质学院学报,1981(3):94-102.
ZENG P W. Mobile method of aeromagnetic compensation[J] .Journal of Changchun University of Earth sciences,1981(3):94-102. (In Chinese)
[5] BICKEL S H.Error analysis of an algotithm for magnetic compensation of aircraft [J].IEEE transactions on aerospace and electronic systems,1979,15(5):620-626.
[6] BICKEL S H.Small signal compensation of magnetic fields resulting from aircraft maneuvers [J]. IEEE transactions on aerospace and electronic systems,1979,15(4):518-525.
[7] 刘浩,卢立波,杨望.关于高精度航空磁测中的磁补偿原理及补偿效果的评价及探讨[J].物探化探计算技术,2014,36(4):431-434.
LIU H,LU L B, YANG W. Investigation of magnetic compensation principle and compensation effect evaluation on high accuracy aeromagnetic survey[J].Computing Techniques for Geophysical and Geochemical exploration. 2014,36(4):431-434. (In Chinese)
[8] 李晓禄,蔡文良.运五飞机上航磁梯度测量系统的安装与补偿[J].物探与化探,2006,30(3):224-228.
LI X L,CAI W L.The assembly and compensation of the aeromagnetic gradient measurement system on the Y-5 aircraft[J]. Geophysical and Geochemical Exploration,2006,30(3):224-228. (In Chinese)
