有轨电车正线道岔控制仿真系统的研究
2018-05-03向美柱陈林秀张铭瑶
向美柱,陈林秀,张铭瑶
(西南交通大学 信息科学与技术学院,成都 611756)
有轨电车从发展到衰落,再到繁荣复兴,已成为现代交通体系发展中不可或缺的一员[1]。有轨电车以人工目视驾驶为主,采用独立和混合路权,使用平交路口,所以有轨电车信号系统一般无ATP防护,信号显示和道岔控制异于地铁[2]。通过对正线信号系统功能需求分析可知,现代有轨电车的正线信号系统实质上是一个道岔控制系统[3]。
列车运行控制是一个工程量大、复杂的系统过程,由于周期长,投资大,对于初期理论研究,不可能全部采用现场测试的方法,所以当前广泛使用仿真技术来模拟现场环境[4]。目前对有轨电车正线道岔控制的研究更多的是理论方案的分析,而缺少系统的设计与实现。因此,本文拟结合现场实际有轨建设情况,对有轨正线道岔控制技术进行分析和研究,并基于西南交通大学城轨实验室,设计与实现了正线道岔控制仿真系统。
1 城市轨道交通控制实验室简介
实验室由西南交通大学和教育部共同投资建设而成,主要由轨道交通沙盘及控制系统、车站模拟系统、控制中心及网络通信系统、运营管理中心4部分组成。如图1所示,本文主要基于沙盘控制系统的相关仿真硬件设备进行系统的设计与实现。
2 有轨电车正线道岔控制方式
道岔作为联锁关系的重要组成部分,是确保电车正常运营、实现电车安全防护的重要设备[5]。根据文献[5-11],本文分析与总结了现有正线道岔控制方式,并将其分为非电动控制、电动控制和地面手动控制3类。
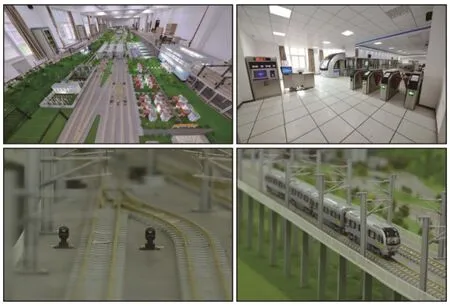
图1 城市轨道交通控制实验室
(1)非电动控制:分顺向弹性可挤式道岔和弹性可挤机械式转辙机两种。它们都是依靠机械原理,利用电车轮对的侧向外力来实现道岔的动作。
(2)电动控制:分为自动控制、车载司机遥控、轨旁现地控制和中心人工控制。前3种方式是目前使用最为广泛的,是本文仿真系统研究的重点,而中心人工控制是指为满足特殊的运营需求,运营调度中心人员可在按一定人工操作流程之后,从调度中心下达进路命令给轨旁道岔控制设备;轨旁道岔控制设备收到命令之后,检查联锁条件,条件满足,解锁或排列进路,道岔动作。
(3)地面手动控制:即人工搬动道岔,在特殊情况下,司机可通过专用的铁尺深入到转辙机的缝隙,人工将道岔扳到所需位置。
3 系统架构
系统分为人机会话表示层、消息生成层、逻辑关系处理层、无线网络数据传输层、监控层与执行层6个层次,如图2所示。
(1)人机会话表示层:即人机交互界面,提供各种操作表示。
(2)消息生成层:操作命令的生成、接收及转化,通过响应并解析表示层的用户操作,将解析后的命令传递给下一层,以便逻辑关系处理层能及时响应并触发对应的事件驱动处理函数。
(3)逻辑关系处理层:系统的业务处理单元,除接收来自上一层的操作信息外,还接收来自监控层的反映线路、电车、信号和道岔的信息,然后根据联锁逻辑条件,对输入的状态信息与操作信息,以及内部当前信息进行处理,产生相应的道岔控制命令、信号控制命令、电车控制命令等,并交付给现场仿真设备予以执行。逻辑关系处理层要求具有故障-安全性能。
(4)无线网络数据传输层:上层仿真系统与硬件仿真设备的数据通信是通过无线局域网实现,该层是逻辑关系处理层与监控层的数据交互通道。数据传输层采用TCP通信,要求数据可靠传输。

图2 仿真系统架构
(5)监控层:通过数据传输层,接收来自逻辑关系处理层的道岔控制命令、信号控制命令和电车控制命令,从而分别驱动道岔转换、改变信号显示与控制电车运行;通过数据传输层,向逻辑关系处理层传输道岔、信号,以及电车与线路等状态信息。
(6)执行层:即现场设备仿真层,对应着沙盘上的电车、信号机、道岔及线路等。
4 系统功能
有轨电车的特点决定了道岔控制系统的技术特性与运营需求:无 ATP 防护需求;无 ATO 需求;无超速防护需求。对自动控制、司机遥控及现地控制进行功能设计。要求具有可视化的人机交互界面(HMI),HMI将线路、电车、道岔及信号机的静态信息和动态信息可视化呈现给电车司机,并提供司机对道岔进行控制的操作按钮。系统主要功能有通信接口模块、逻辑运算处理模块、道岔控制模块、信号控制模块等,如图3所示。
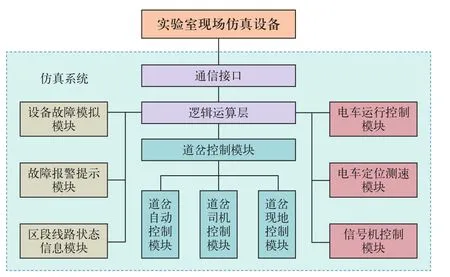
图3 系统功能模块
基于Windows系统和PC机,使用C#和C语言,进行功能的模块化设计与实现,此外,用面向连接的Socket套接字实现通信接口的开发。
4.1 道岔自动控制
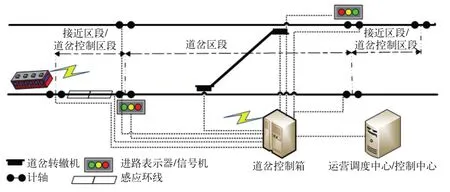
图4 道岔控制原理图
图4为道岔电动控制原理。轨旁道岔控制箱主要由车地通信设备、计轴检测设备、转辙机控制单元和信号机控制单元组成。在自动控制方式中,运营中心赋予每辆电车独一无二的车次号,当电车接近道岔区,通过车地双向通信设备与地面设备建立连接,响应当前轨旁道岔控制箱的呼叫。此时,电车将车次号信息,以及从电车位置检测设备采集的位置信息回传给道岔控制箱,其中还包括道岔操作请求指令。道岔控制箱中的转辙机控制单元根据运营中心下达到本地的运营计划表,依据收到的车次号信息,并在检查进路联锁条件满足之后,自动办理进路,道岔动作,当道岔锁闭之后,信号开放,然后向车载发送进路信息[6]。
电车依次通过接近区段、道岔区段,在驶出离去区段时,电车位置检测设备将位置信息再次发送给道岔控制单元,在联锁关系满足之后,电车出清,解锁进路。自动控制实现流程如图5所示 。
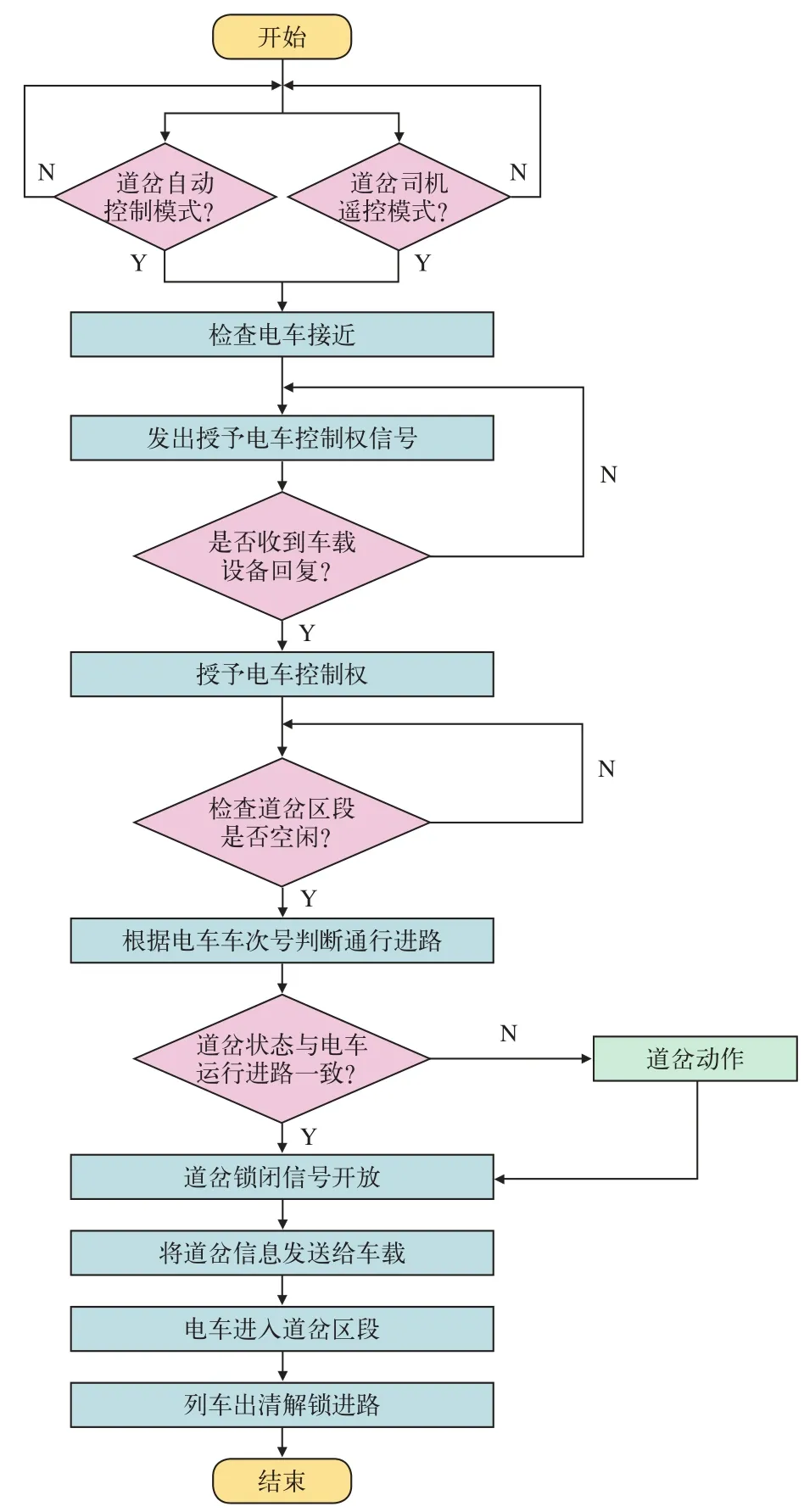
图5 自动控制及司机遥控流程
4.2 道岔司机遥控
在上述自动控制失效的情况下,或在信号系统故障和电车在非运营计划表内的情况下,采用车载司机遥控道岔的方式。
当电车驶过道岔自动控制区段,道岔还未动作,车载 HMI 报警提示司机按压车载相应按钮,进行司机遥控道岔操作,通过车地通信设备,将进路信息发送给道岔控制箱。道岔控制单元在收到车载道岔操作请求指令后,检查联锁条件,条件满足,排列进进路,道岔动作并锁闭,开放信号。这时电车就可以继续正常行驶,越过道岔,驶出离去区段,自动解锁进路[7]。车载HMI 要设置道岔定位和反位的操作按钮,还需设置道岔控制请求按钮,以及道岔状态指示灯等。司机遥控实现流程如图5所示。
4.3 道岔现地控制
当上述自动控制和司机遥控都失效时,电车司机可下车通过设置在进路表示器上的按钮,人工操作道岔[8]。该控制方式用于车地通信故障或局部异常时。为防止误动作,可对操作按钮盘设锁,进行防护。如图6是苏州有轨轨旁操作按钮盘,按压白色按钮代表开通直向进路,电车正向通过道岔;按压黄色按钮代表开通侧向进路,电车侧向通过道岔;按压蓝色按钮代表禁止通行。

图6 轨旁进路操作按钮盘
结合上述过程,该功能是用C#做一个模拟的轨旁进路操作按钮盘,通过按压按钮控制道岔的动作,动作完毕之后,开放信号。现地控制模块是通过串口通信实现,流程如图7所示。

图7 现地控制流程
4.4 通信接口
上层仿真系统软件与现场仿真设备是通过无线局域网,利用Socket通信进行数据的接收发控制。通信接口设计与实现如图8所示,仿真系统作为服务端,现场设备作为客户端,这样设计的好处在于仿真系统允许多个现场设备连接进来。仿真系统设计两个通信接口线程,线程1是与电车建立连接的接口,线程2是与信号机、道岔建立连接的接口,两个线程独立并同时工作。
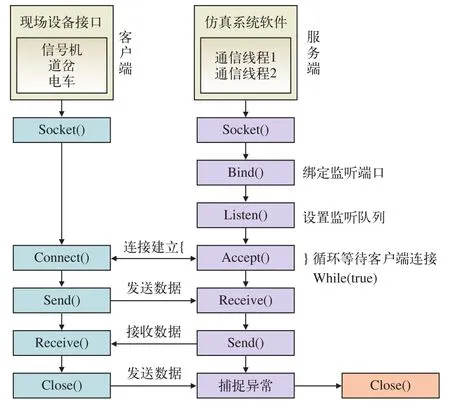
图8 通信接口设计与实现
4.5 电车定位及运行控制
实际中常采用应答器、计轴等设备进行定位检测[12],而本系统中用 IC 卡来实现。
在沿线等间距铺设了很多IC卡,每个IC卡存储了唯一编号。电车在运行过程中,通过车上的读IC卡装置获取IC卡编号,并将编号打包进回传数据包中。为了在系统的线路图中匹配电车实际位置,界面上用矩形控件进行IC卡的模拟铺设,并为其Name属性命名为实际IC卡的编号。电车定位及运行控制实现流程如图9所示。
4.6 设备故障模拟注入
电车在实际运行过程中,面对故障情况,可选用备用道岔控制模式以顺利通过道岔区域。仿真系统为实现该功能,设计了故障模拟注入功能。系统通过设置故障类型、故障点以及故障发生时间,可实现电车运行过程中的故障提示,提示司机采取措施以确保电车安全通过道岔区域。系统为每种故障设置了一个故障标识位flagFault(0为正常,1为故障)。设备故障模拟注入流程如图10所示。

图9 电车定位及运行控制流程

图10 设备故障模拟注入流程
4.7 道岔控制模式切换
当电车在自动控制模式下运行,且在自动控制区段的最后一个检测点道岔还未动作,将提示切换到司机遥控模式;若司机遥控模式下道岔仍未动作,则提示切换到现地控制模式。切换流程如图11所示。
5 系统测试
借助实验室搭建了测试环境,对道岔自动控制方式进行测试,电车在接近道岔区段,道岔自动动作,开放信号,如图12所示。
对道岔司机遥控方式进行测试,电车在接近道岔区段,按压按钮,道岔动作,开放信号,如图13所示。
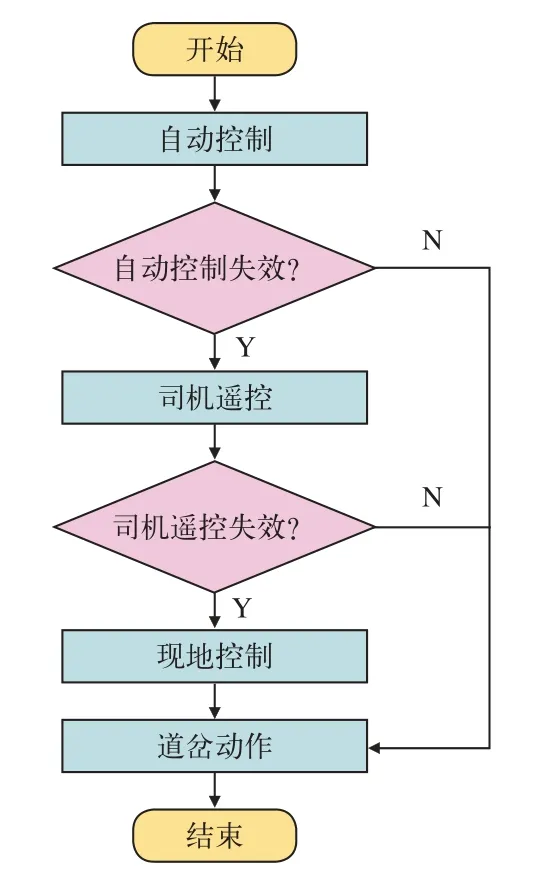
图11 道岔控制模式切换流程

图12 自动控制测试

图13 司机遥控测试
对道岔现地控制方式进行测试,打开现地控制模拟环境,按压操作按钮盘按钮,开放进路,开放信号,如图14所示。
对道岔自动控制、司机遥控、现地控制测试成功之后,进行控制模式切换测试。在自动控制下,注入故障,设置故障发生时间,故障提示进行司机遥控,如图15所示。

图14 现地控制测试
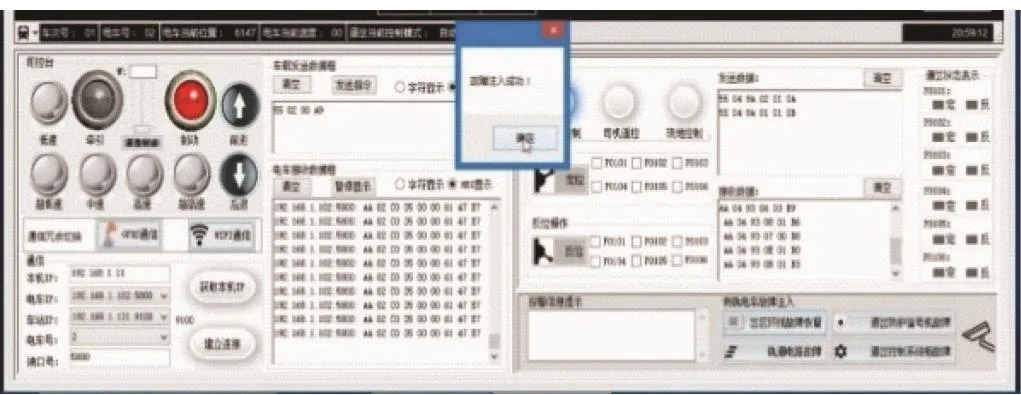
图15 故障模拟注入测试
6 结束语
本文参照苏州有轨电车、张江有轨电车、武汉在建有轨电车等实际项目并结合理论,模块化设计与实现了有轨电车正线道岔控制仿真系统,并基于现场仿真设备,通过了系统测试,验证了系统的真实可行性,为有轨电车平交道口子系统的研究提供参考。本仿真系统涉及的相关设计与实现方法已成功应用于实训教学中,为相关学习以及其他类似仿真系统的研究提供了重要参考价值。
参考文献:
[1] 苗彩霞.现代有轨电车系统特点及应用前景[J].都市快轨交通 ,2013,26(3):9-12.
[2] 刘海军.现代有轨电车信号系统设计分析[J].都市快轨交通,2013,26(6):156-159.
[3] 李 晶.现代有轨电车正线道岔控制方案的选择[J].铁道通信信号,2015,51(1):69-72.
[4] 徐立芳,莫宏伟.仿真技术在智能控制实验平台建设中的应用[J].实验技术与管理,2013,30(8):74-76,85.
[5] 刘先恺,梁 靓,陈鹏飞,等.现代有轨电车正线道岔控制技术研究[J].中国铁路,2015(2):82-85.
[6] 公吉鹏.新型有轨电车道岔控制方案分析[J].城市轨道交通研究,2014,17(7):119-121.
[7] 高桂桂.现代有轨电车信号系统设计研究[J]. 城市轨道交通研究,2015,18(1):67-71.
[8] 王国军,贾利生,韩 晓.有轨电车道岔控制方案及安装方式研究[J].铁道标准设计,2014(1):57-60.
[9] 李 强.现代有轨电车正线道岔控制系统方案研究[J].电气自动化 ,2015,37(2):100-102.
[10] 刘新平.新型有轨电车信号系统方案研究[J].城市轨道交通研究,2012,15(5):50-52.
[11] 唐贾言.现代有轨电车的运营控制系统[J].自动化应用,2010(12):61-63,65.
[12] 李鸿旭,喻智宏,刘圣革.现代有轨电车智能控制系统中的车辆定位技术方案[J].都市快轨交通,2013,26(6):160-162.
[13] 江 磊.城轨控制实验室仿真平台硬件接口研究[D]. 成都:西南交通大学,2012.
[14] 林瑜筠.城市轨道交通联锁系统[M].北京:中国铁道出版社,2013.
[15] 温 昱.软件架构设计[M].北京:电子工业出版社,2007.