基于SVM的列车速度融合仿真测试平台设计
2018-05-03贾鹏
贾 鹏
(中国铁道科学研究院集团有限公司 通信信号研究所,北京 100081)
基于通信的列车控制(CBTC,Communication Based Train Control)系统随着城市轨道交通的发展和相关技术的成熟,已经成为我国地铁运营中所采用的主要制式。列车速度的测量关系到CBTC系统对列车速度的监督、列车位移的计算、列车位置的管理、列车追踪间隔的确定以及列车速度的控制等一系列保障列车运行安全的相关功能[1]。因此,准确地测量列车速度是保证列车安全运行的基础。目前,主流的列车测速方案是由安装于轮轴上的测速电机(OPG)与安装于车底的雷达共同输出的速度信息确定列车当前的运行速度[2]。OPG通过检测与被测物体具有相同转速的码盘脉冲来得到具体的速度信息,其具有原理简单、测量精确等优点。雷达测速传感器是根据多普勒效应,通过发射特定频率的微波信号,然后对反射过来的回波进行检测,通过计算得到被测物体具体的速度信息[3]。
现行的列车测速方法大多采用以OPG测速信息为主,雷达测速为辅的测速策略。列车速度信息来源主要来自OPG,当列车发生空转打滑时OPG的测速信息无效,此时使用雷达测速信息作为主要的速度信息来源。此种方法的优点是实现方式简单,其缺点是系统过度依赖OPG的测速性能。在OPG测速性能下降时可能出现测速信息不准确导致的安全事故。
本文针对当前列车测速方法简单、测速不准等问题,结合列车的运行工况,对OPG速度信息和雷达速度信息进行融合。设计了相应速度融合仿真测试平台,对速度融合算法进行验证。
1 基于支持向量机的速度融合
基于支持向量机(SVM)的速度融合指的是由OPG和雷传递来的数据在进行估计、判断、处理时采用支持向量机算法。分别将传感器速度和列车运行工况参数作为SVM输入[4-5]。融合原理如图1所示。
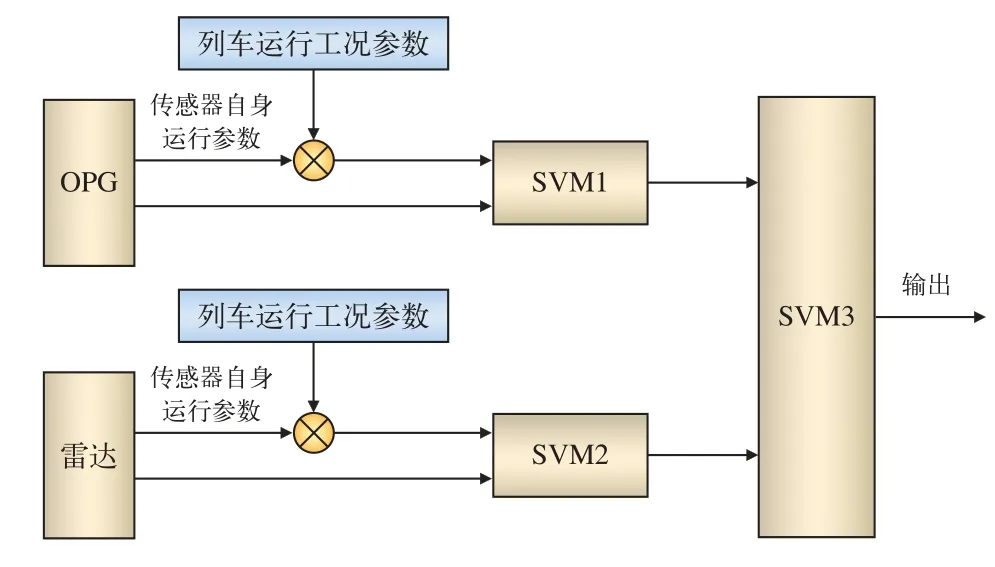
图1 基于SVM的速度融合模型
其训练样本T可描述为一个具有z个三维输入参数样本数据和z个一维输出的集合,即式(1)。

其中,X表示包含雷达测速传感器和轮轨测速传感器所测得的三维样本数据集合,Y表示系统最终确定的列车速度。建立该模型的目标是能够求得目标函数f(x),表示出样本中输入样本集合X和输出样本集合Y的关系。为此,需要进行如下步骤的处理:
(1) 确定非线性映射将训练样本T;
(2)构建最优函数表达式,如式(2)。

则其结构风险J为式(3),其中,经验风险由ε–insensit代阶函数描述。

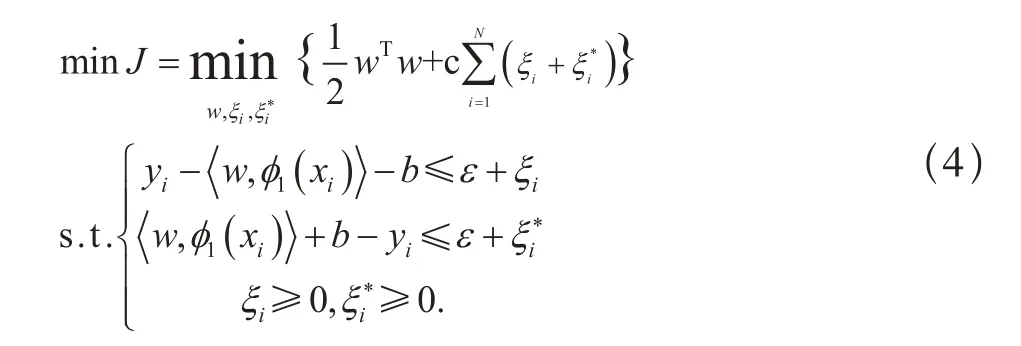
式(4)中,ε为允许拟合误差,由拉格朗日乘子法、对偶原理及核方法,式(4)可转换为式(5):
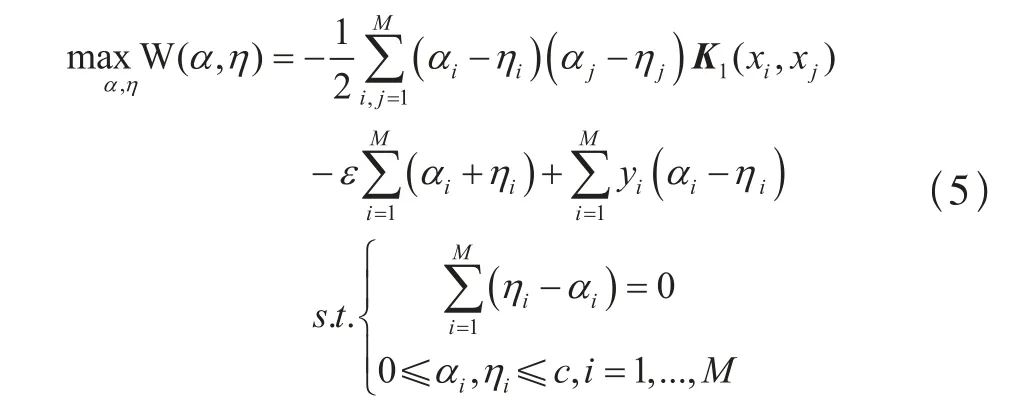
式(5)中,α、η为拉格朗日乘子,K1为核矩阵。选定核函数后,通过解线性方程组可求得α、 η最优解(3)选定合适的核函数后,在高维空间中进行内积运算,取得原空间的非线性回归结果,即SVM输出为:

2 速度融合仿真测试平台设计
2.1 平台架构
速度融合仿真测试平台由目标速度计算单元、OPG速度发生单元、雷达速度生成单元、速度采集接口单元、速度信息预处理单元、速度融合单元以及分析与诊断单元组成,平台结构如图2所示[6]。平台的输入参数为列车参数、线路数据、目标速度以及列车运行相关的控制参数,输出参数为速度融合结果、诊断结果和报警信息。

图2 平台架构示意图
平台通过控制参数的输入仿真列车实际运行模式,手动控制命令包括控制列车加速、减速和惰行指令。自动控制命令包含加速/减速策略、巡航速度和巡航时间的设定。
2.2 工作原理
速度融合仿真测试平台的功能原理图如图3所示,其功能模块分为目标速度生成模块、速度采集模块、速度融合模块以及数据分析与诊断模块。
2.2.1 目标速度生成模块
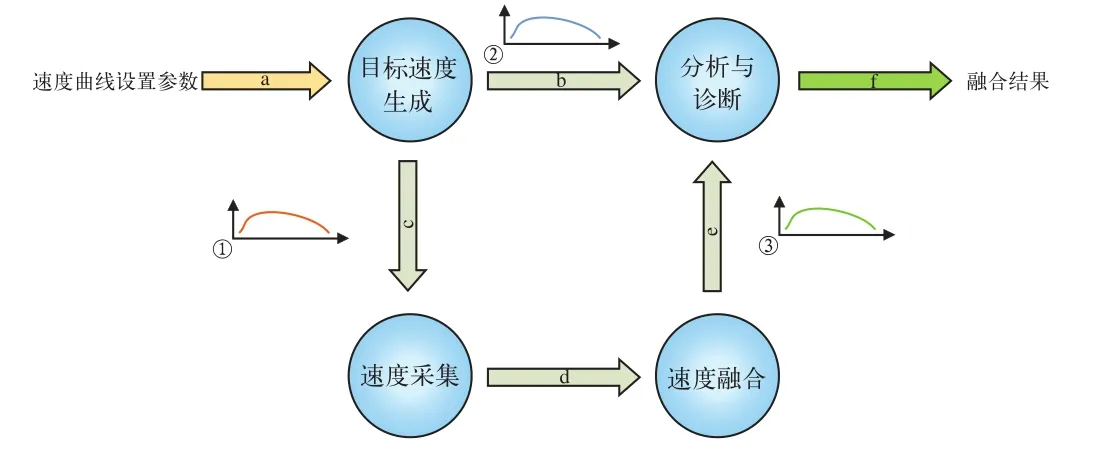
图3 平台功能原理图
此模块的功能是模拟真实的线路和车辆运行状态,根据列车运营中不同的工况生成目标速度。模块的核心是列车运行模型,其生成的速度信息是速度采集模块和分析与诊断模块的输入。其中,速度采集模块的输出是OPG和雷达两路信息。目标速度生成时,通过此模块的参数设置功能,设置真实的线路数据和列车参数,模拟列车实际运行时的速度。速度生成后,此模块按照目标速度驱动电机转动,此时,安装于电机所带动的轴上的OPG通过测量轴的转速完成目标速度对OPG的输出。目标速度生成模块根据既有的列车运行数据中的雷达数据,通过对不同工况下雷达输出数据的整理,形成雷达速度数据库[7]。可通过设置列车的运行状态和速度等级对雷达的速度信息进行输出。目标速度生成模块功能示意图如图4所示。

图4 目标速度生成模块功能示意图
2.2.2 速度采集模块
速度采集模块完成对目标速度生成的OPG和雷达速度的采集和预处理。其功能示意图如图5所示。OPG速度测量接口单元将OPG输出的模拟信号转换成脉冲信息后输入速度信息预处理单元。雷达速度测量接口单元是通用的RS485通信接口。速度预处理单元接受来自接口单元的速度信息后,生成速度的测量值,分别计算两路速度的归一化方差σ,设置预测环境误差e,并将以上3个值发送至速度融合单元。
2.2.3 速度融合模块

图5 速度采集模块功能示意图
速度融合单元接受来自速度采集单元的速度测量值以及与测量值相关的参数。根据输入信息和数据融合知识库选择测速融合算法,将最终的融合速度输出至分析与诊断模块。测速信息的融合过程如6所示。
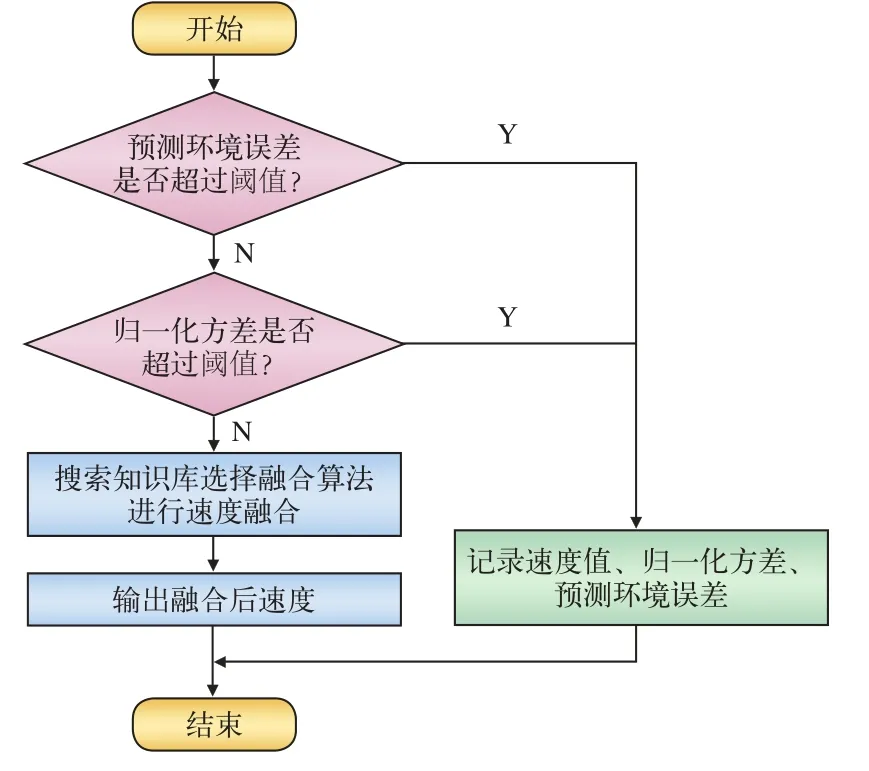
图6 速度融合过程示意图
2.2.4 分析与诊断模块
分析与诊断模块的主要功能是完成对目标速度和融合速度的比较,根据比较结果验证速度融合策略的正确性,并对融合异常的速度值和相应的测速传感器参数(归一化方差和预测环境误差)进行记录和报警。分析与诊断模块是对速度融合知识库的验证,其记录的融合误差较大的知识库信息为知识库的离线训练提供验证依据。
2.3 软件设计
速度融合仿真测试平台上位机软件是基于微软基础类库(MFC)技术开发的[8]。能够根据人机界面的控制指令和线路数据库完成目标速度的生成,实现对电机的驱动和雷达速度的生成,实现对速度信息的采集、融合和诊断,并输出和记录诊断结果。软件的开发遵循标准化、通用化和模块化的原则,按照软件的功能和应用范围,将软件划分为仿真测试流程管理模块、初始化模块、人机界面、目标速度生成模块、OPG速度发生模块、雷达速度发生模块、速度预处理模块、速度融合模块和分析与诊断模块。
3 验证结果分析
软件设计完成后,着手搭建测试平台进行调试和验证。测试平台的硬件由一台工业控制计算机,电动机和OPG组成的转速台、多通道数据采集卡组成。平台搭建完毕后,进行速度融合仿真。现场测试如图7所示。

图7 现场测试图
测试结果表明,基于支持向量机的多信息融合能够使得滤波后融合信息的波动性和偏差大幅度降低,得到较好的处理结果。基于SVM的速度融合方法与旧测速方法的测速效果对比如图8所示。两种方法的误差指标如表1所示。由表1可知,支持向量机的多速度信息融合滤波后所测得的速度误差在0.6%,基于支持向量机的速度融合方案在测速的平滑性和测速的精度上比旧测速方法的效果更好[9]。

图8 高速牵引制动工况下基于SVM的速度融合

表1 测速误差对比表
4 结束语
本文提出了一种基于支持向量机(SVM)的速度融合算法,对OPG速度信息和雷达速度信息进行融合,并且搭建了相应的测试平台。通过模拟各种速度工况对该算法进行验证,证明该算法具有较高容错能力,提高了测速的准确性,可以解决当前列车测速方法简单、测速不准等问题,具有一定的实际应用价值。
参考文献:
[1] 刘培顶,陈荣武. 基于速度传感器的测速定位算法研究[J].铁路计算机应用,2016,25(2):50-54.
[2] 张兵兵.国产CBTC系统的应用研究[J].铁道通信信号,2011(8):49-50
[3] 鲍鹏宇,牛道恒.高速列车测速测距系统故障模式研究[J].铁路通信信号工程技术,2015(5):8-10.
[4] 张永利. 基于支持向量机的信息融合技术研究及应用[D]. 西安:西安科技大学,2008.
[5] A.Mirabadi,N.Mort,F.Schmid.Application of Sensor Fusion to Railway Systems[C]//Proceedings of the 1996 IEEE/SICE/RSJ International Conference on Multisensor Fusion and Intergration for Intelligent Systems,1996:185-192.
[6] 边伟众,郜洪民,尹逊政.移动闭塞系统列车位置不确定性算法研究[J].中国铁路,2014(7):68-79.
[7] 张武娟.雷达测速在列车运行中的研究与应用[D]. 长沙:中南大学,2008.
[8] 徐 璇,姜明新,黄 静.基于MFC的工程软件界面设计[J].电子设计工程,2011(21):12-14.
[9] 陆德彪.列车组合定位系统可信性研究[D].北京:北京交通大学,2010.