高速动车组牵引制动仿真系统中的精准停车算法
2018-05-03王皓
王 皓
(中国铁道科学研究院集团有限公司 机车车辆研究所,北京 100081)
铁路运输在我国国民经济中占有非常重要的地位,其中,数以亿记的铁路客运任务由高速动车组来承担,因此对发展高速动车组提出了很高的要求。
高速动车组仿真平台的研究,在国外已经展开。比较成熟的有北美的RAILSIM、欧洲的Trainstar、日本的UTRAS[1]、俄罗斯的EMUTTCS[2]。它们各有特色,但都不是按照中国的国情需要设计开发的。因此有必要结合我国的实际需求,开发具有中国特色的、结合实际应用需求的动车组仿真平台[3]。
我国原铁道部制定了铁道行业标准《列车牵引计算规程》[4](简称:规程)。《规程》中规定的相关计算公式,可以用于高速动车组的计算,但是为了模拟动车组在整条轨道线路上的行驶过程,开发仿真系统,用计算机仿真来替代手工计算[5]。
为了不断完善和提高动车组的性能,满足日益增长的铁路运输需求,中国铁道科学研究院集团有限公司机车车辆研究所(简称:铁科院机辆所)开发了基于《规程》的高速动车组牵引制动仿真系统。该系统提供了动车组仿真需要的基本参数的编辑功能,用仿真项目的形式配置仿真过程需要的参数,并按照《规程》要求,模拟高速动车组在轨道上的运行过程,提供自动驾驶功能。防止高速动车组超速是非常重要的功能[6],模拟司机驾驶可以方便直观地调整控制动车组运行过程的细节[7-8]。如果仿真系统只是简单的使用区间限速和固定的加减速控制[9],是难以根据不同司机的驾驶习惯和线路状况,实现精准停车的。精准停车,又涉及到区间运行分析的精准度和有效性。以往的仿真系统,对于仿真车辆的到站停车控制精度不够,经常出现误差。如果整条线路涉及很多车站,则这个误差的累计,会给仿真结果带来不可忽视的误差。本文介绍一种控制仿真系统中车辆精准停车的算法来解决这个问题。
1 高速动车组仿真系统中精准停车算法设计
1.1 仿真系统简介
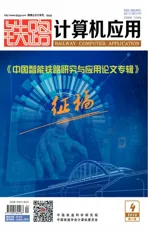
本文提出的精准停车算法,是基于铁科院机辆所开发的“高速动车组牵引制动仿真系统”来实现的,该系统由4个一级模块和13个二级模块构成,如图1所示。高速动车组参数编辑模块和仿真项目负配置模块责记录仿真过程需要的参数;仿真运行模块负责完成动态计算过程,生成仿真数据;数据报告模块提供了仿真结果的初步分析和仿真数据导出功能。
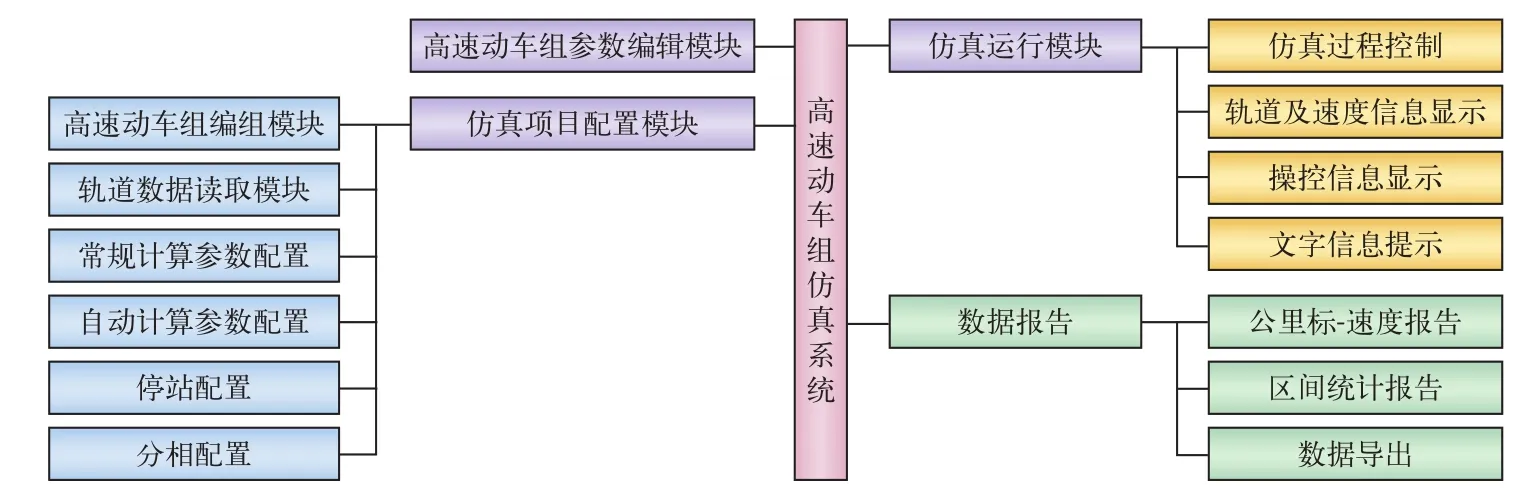
图 1 高速动车组仿真系统主要模块简介
仿真系统在自动驾驶高速动车组运行的过程中,按照项目配置中指定的时间间隔对高速动车组的状态进行采样记录,并按照模拟司机操作的加减速方案控制手柄,如图 2所示。在仿真过程中,软件要记录控制高速动车组的手柄状态,以及高速动车组运行状态,如图 3所示。这些数据点允许,仿真系统“回退”高速动车组运行过程,为人工调整高速动车组控制操作提供方便。同时这些数据也是后续生成报告的基础,是数据报告模块的主要输入参数。

图 2 项目配置中模拟司机的加减速操作
在高速动车组仿真系统中,软件模拟动车组在轨道上移动的时候,高速动车组一律以从左向右行驶为前进方向。如果需要模拟另一个方向的行车,则需要把轨道的数据反转过来,生成另一个轨道数据文件,并读入到仿真系统中进行仿真。因此,仿真系统中不需要反向行车的功能,这样可以简化仿真系统的设计。
1.2 算法设计
我们定义的精准停车算法,其目的是:在仿真系统中使用自动驾驶功能的时候,能将高速动车组精准进站停车。对于模拟不同司机驾驶习惯或动车组减速特性,具体进行减速的位置和减速手柄操作会有明显差异,因此本算法需要使用高速动车组配置参数、轨道数据和模拟驾驶员等基本参数等,这些数据已经在仿真系统中包含了。而且该仿真系统,能够结合动车组运行过程中的牵引力、制动力、基本阻力、附加阻力等力学公式模拟高速动车组的运行。本文集中描述停车算法的核心要素——“公里标-限速”曲线。
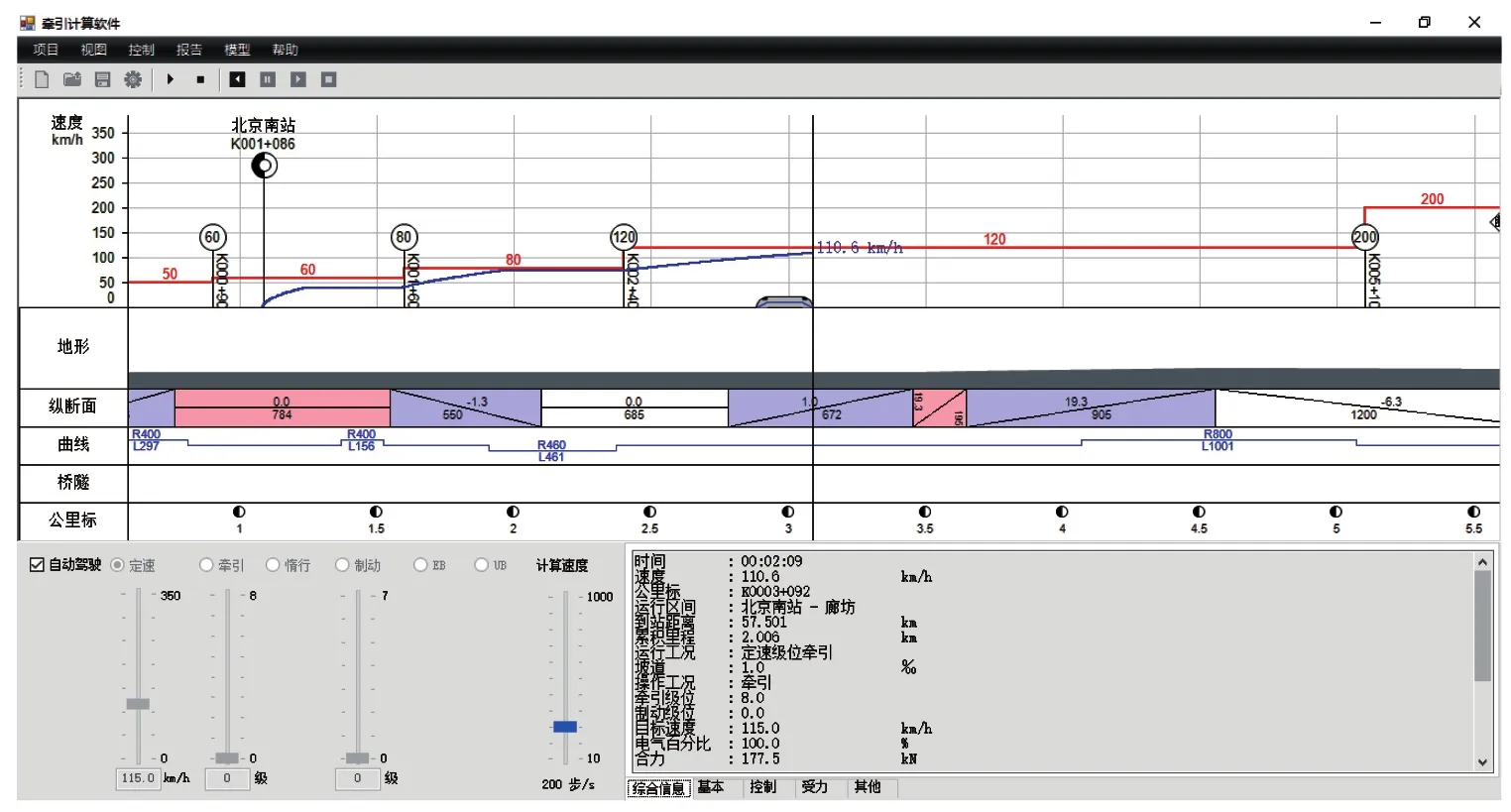
图 3 仿真过程的主界面
该曲线模拟反向“播放”高速动车组在轨道上的行驶,生成一个从停车点到指定行驶速度的“公里标-限速”曲线,只要驾驶过程中,高速动车组能够尽可能不超过并贴着这个曲线来驾驶,就可以实现精准停车。以Li–Vi, i∈{0, 1, 2, 3, …}来记录“公里标–限速”曲线,其中,Li表示第i个公里标,Vi表示对应公里标处的限速。这个“公里标–限速”曲线是从停车处开始的,因此, i是反向往动车组后退方向编号的,即L0是停车处的公里标,对应的V0=0。如图 4所示。
图 4 “公里标-限速”曲线的计算
1.2.1 仿真过程的动车组移动公式
利用仿真系统正向模拟动车组前进的算式,
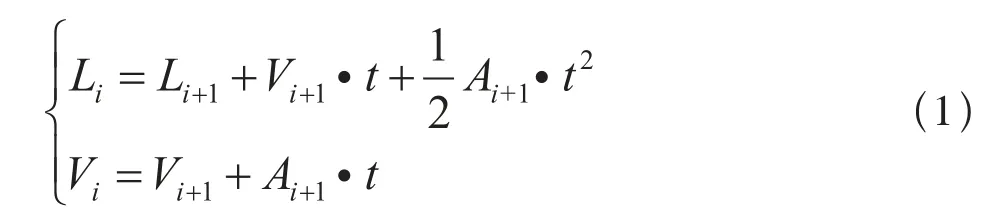
其中,t为仿真系统模拟动车组运行时的数据点采样间隔;Ai+1为动车组在公里标Li+1处的合力产生的加速度,即

其中,Fi+1为动车组控制手柄产生的牵引力/制动力;fi+1为阻力,来自经验公式fi+1=a+bVi+1+a、b、c为通过实验获得的经验常数,ωi+1为轨道阻力,是动车组在公里标Li+1处的坡道、曲线、隧道等产生的阻力合力;M为动车组质量;γ为动车组回转质量系数。这些参数每个动车组的车型都不完全相同,一般可以从《规程》中获取。
1.2.2 “倒车”公式
当让高速动车组在公里标Li的时候,速度不超过Vi。可以倒推,高速动车组在前一个位置公里标Li+1处应该如何控制,才能在经过时间t后,准确地开到公里标Li处并达到车速Vi。即已知参数Li、Vi,要求解参数Li+1、Vi+1。
在高速动车组仿真系统的仿真项目配置参数里,设计了模拟司机操控动车组时,在不同速度下,司机使用的制动手柄发挥出的制动力的百分比,如图 2所示。因此可以通过速度Vi+1得到Fi+1。由于轨道线路不会频繁短距离变化坡度、曲线等路况,且司机在制动过程中也不可能频繁的调整制动手柄,因此,当时间t很小的时候(例如:仿真系统可用t=0.1 s甚至更短的时间间隔进行状态推导),我们可以认为Fi+1≈ Fi、fi+1≈ fi、ωi+1≈ ωi。
于是,可以利用近似计算,把式(2)变为Ai+1=Fi–fi–ωi/M•(1+γ),然后带入式(1),并整理为用已知的Vi、Li得到Vi+1和Li+1的求解公式:
1.2.3 “公里标-限速”曲线的终止条件
“公里标-限速”曲线的最后一个点的速度应该设定为高速动车组的最高允许速度,或轨道线路的最高允许速度。而且,仿真的轨道线路上每个停车站,都要计算一条这样的限速曲线。当高速动车组行驶的位置,到达某一个“公里标-限速”曲线的范围内时,就要额外检测车速是否超过该位置的限速,如果超过,则要根据减速方案进行制动。如果高速动车组的位置是在“公里标-限速”曲线两个数据点的公里标中间的位置,则可以根据拉格朗日插值法,求出对应的限速值来。
2 在仿真中的应用和效果
2.1 停车中的应用
在仿真系统中,自动驾驶的时候,高速动车组的减速操作和“公里标-限速”曲线的倒推操作都使用错误!未找到引用源。定义的“减速方案”。因此必然能够非常贴合该曲线进行减速制动,从而实现精准停车,如图 5所示,其中,黄色虚线是“公里标-限速”曲线,蓝色是实际运行速度。
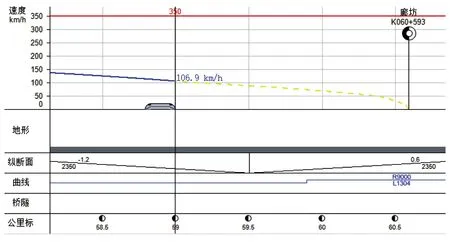
图 5 “公里标-限速”曲线用黄色虚线表示,车速为蓝色实线
2.2 提前减速和防止惰行超速的应用
除了进站停车之外,在仿真系统中,“公里标-限速”曲线还可以用于以下2种需要提前减速的情况。
2.2.1 提前减速
当轨道上前进方向,存在从高限速到低限速的情况,需要提前减速才能防止出现超速。这时“公里标-限速”曲线的L0就是低限速区段的起点,如图6所示,其左侧为高限速区段,限速350 km/h,右侧前进方向为250 km/h限速路段。高速动车组应提前减速,才能防止超速。
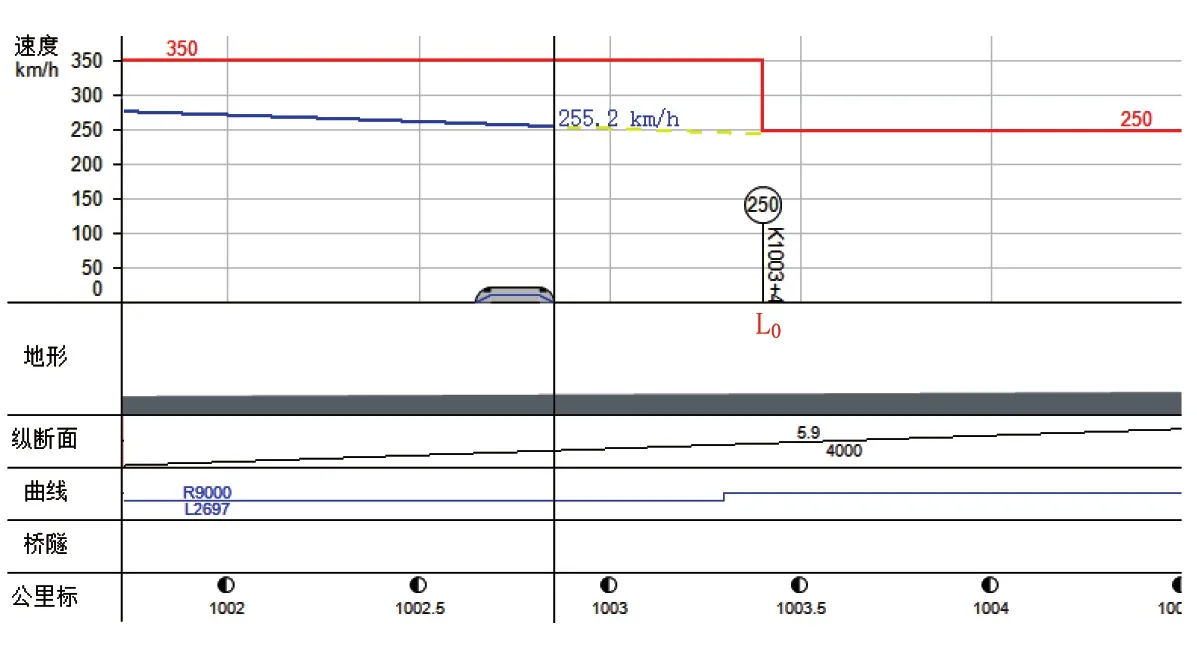
图 6 “公里标-限速”曲线用于从高限速到低限速区段,L0为低限速区段起点
2.2.2 防惰行超速
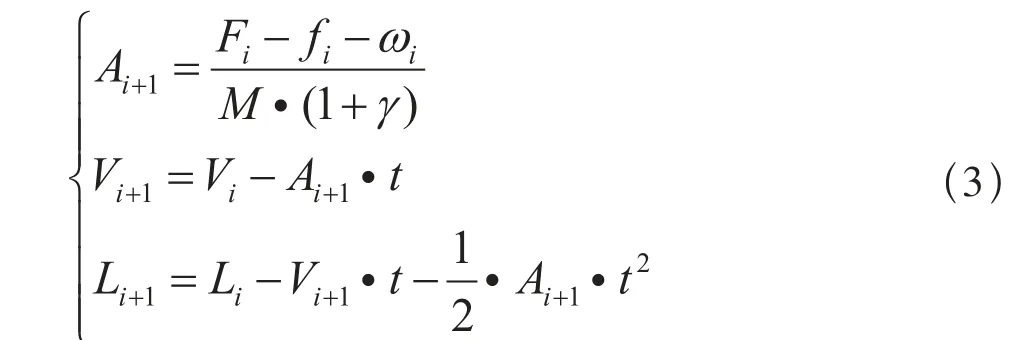
当分相设置在下坡道,高速动车组存在惰行过分相时有超速可能。这时需要一个预先的反推过程。
即假设动车组过分相后重新升弓恢复控制的位置为L0,车速V0为对应的轨道限速。用“公里标-限速”曲线同样的反推方法,使用惰行手柄(而不是制动手柄),向过分相前高速动车组开始惰行的位置Lx倒推(对于不同车速,过分相的预告信号到分相开始处的距离会不同,所以这里用Lx指代过分相预告信号的位置,从这个位置开始动车组要惰行),得到该位置的限速Vx,这个过程中如果出现Vi超过轨道限速,则直接修正Vi为对应轨道限速(或略低一点点)。得到Vx之后,再按照上面的方法,计算从Lx公里标开始的“公里标-限速”曲线。这样就可以利用这条限速曲线来防止高速动车组自动驾驶的时候在分相区间内出现超速的情况了。如图 7所示,以黄色虚线表示的“公里标-限速”曲线,其开始处的速度Vx比限速120 km/h略低,以此保证在坡度为-6.3‰时的下坡过分相过程中,高速动车组不会超过轨道限速。
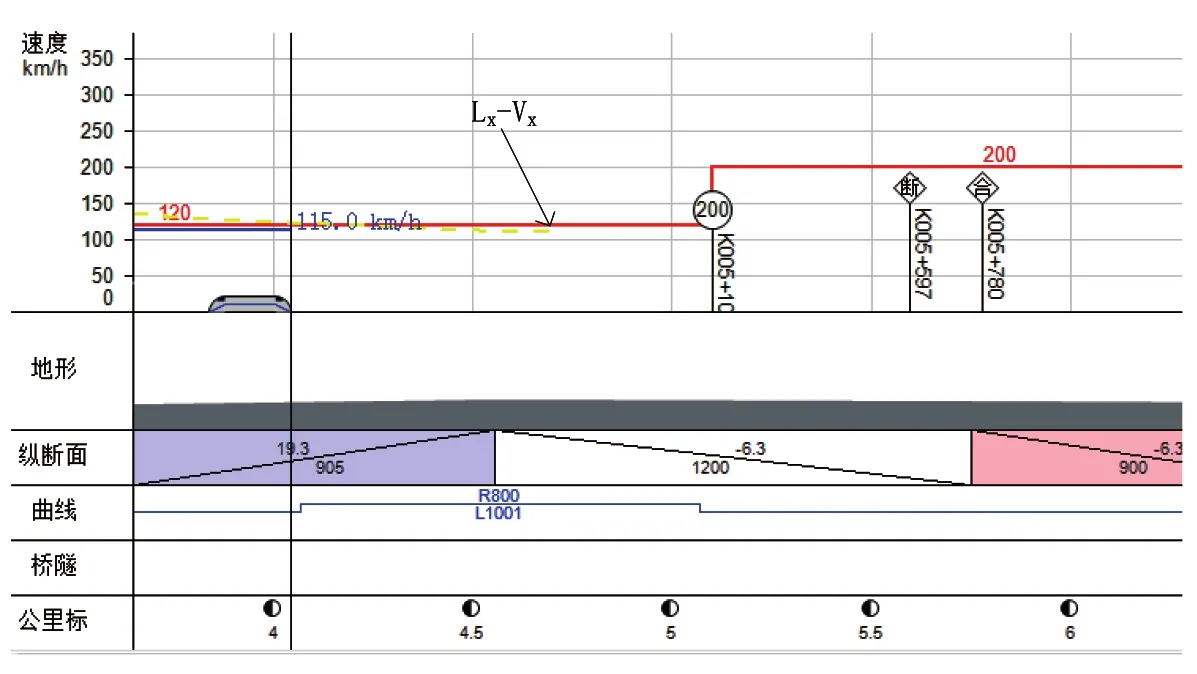
图 7 “公里标-限速”曲线用于下坡过分相防止超速
3 结束语
高速动车组仿真系统提供了动车组在轨道运行的仿真功能,通过使用“公里标-限速”曲线来控制动车组的车速,我们实现了非常精准的进站停车,如图 8所示。
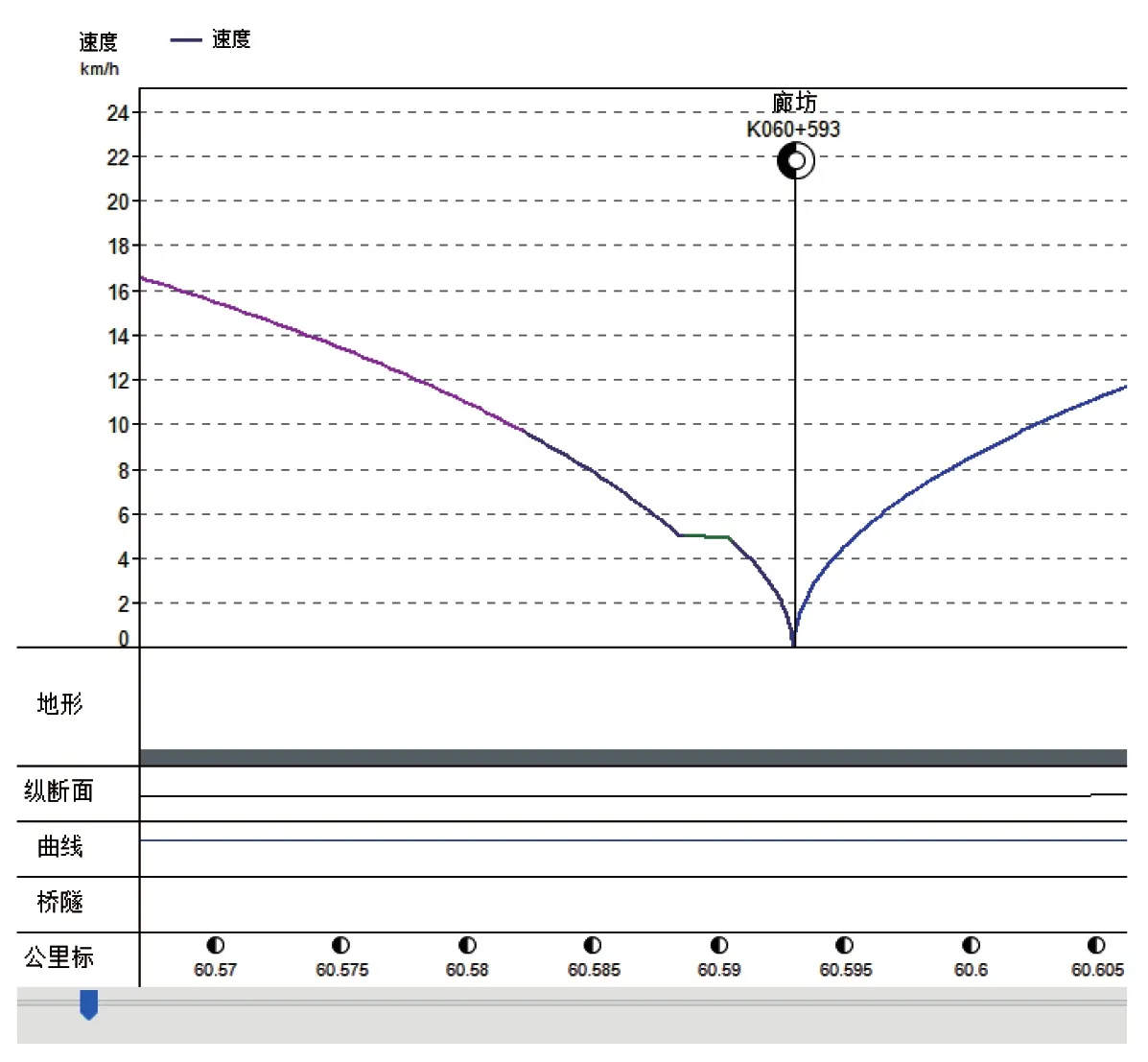
图 8 “公里标-限速”曲线控制停车的案例
仿真结果与理论分析相吻合,证明了本仿真系统能够通过“公里标-限速”曲线控制动车组精准停车,防止出现意外超速,为动车组实验提供有效的参考依据。
参考文献:
[1] 桂 翔.城市轨道交通牵引计算仿真系统的研究和开发[D].北京:北京交通大学,2008.
[2] 康 熊.高速动车组列车牵引仿真计算技术研究[J].中国工程科学,2011(1):62-68.
[3] 张 刚,潘金山,倪少权,等. 列车牵引计算仿真的研究[J].铁路计算机应用,2007,16(8): 18-20.
[4] 中华人民共和国铁道部. 列车牵引计算规程:TB/T1407-1998[S].北京:中华人民共和国铁道部,1998.
[5] 王武生,詹振炎.基于平台的列车牵引计算系统的开发[J].交通与计算机,2003(5):104-106.
[6] 易承龙. 高速铁路列控车载系统超速防护算法的研究与仿真[J]. 铁路计算机应用, 2015,24(8): 50-56.
[7] 李骁宇,李开成,李玉兰,等. 列车司机驾驶仿真子系统的设计与实现[J]. 铁路计算机应用,2014,23(7):16-19.
[8] 杨 光,唐祯敏. 基于MATLAB的磁浮列车自动驾驶控制系统的仿真[J]. 铁路计算机应用,2007,16(6): 49-51.
[9] 陆小红,郭 进. 高速铁路列车自动驾驶系统的研究和仿真实现[J]. 铁路计算机应用, 2011,20(4): 4-6.