基于正则表达式的图像目标特征提取方法研究
2018-05-03许晓东
芦 兵 孙 俊 许晓东
1(江苏大学信息化中心 江苏 镇江 212013) 2(江苏大学电气信息工程学院 江苏 镇江 212013)
0 引 言
图像目标的识别就是对图像中表征物各种形式的可获取信息进行处理和分析,对目标物进行描述、辨认、分类和解释的过程。对图像目标特征的提取和描述效率是构建特征匹配模型的关键[1-3]。尺度不变特征变换(SIFT)[4]和加速鲁莽特征(SURF)算法[5]因其优秀的特征表述能力和较强的鲁莽性被广泛应用于目标识别、特征匹配等领域。随着工业应用的不断深入,对目标提取效率的要求越来越高,而现有算法更多地关注于图像的底层特征,实际提取到的底层特征中往往存在较多的噪声干扰和冗余。如何对提取到的底层特征进行二次整合,使得整合过的图像数字化表征能够更好地反映图像目标的语义内容,解决图像底层视觉特征和高级应用之间的语义鸿沟是问题的关键[6],也是当前基于语义的目标特征构建技术的研究热点。文献[7]在基于图像颜色、边缘等低层局部特征的基础上,提出了一种层次化的高级语义映射关系,再利用Bayes分类方法建立特征模型。文献[8]通过神经网络算法,以目录分类的语义形式对图像进行组织,然后通过非层次的分类方法进行图像目标检测。文献[9]提出了基于属性的图像目标描述方法,通过图像属性语义进行图像目标特征匹配。文献[10]提出了一种增量构建大规模图像内容检索的方法,通过反馈学习机制提升图像语义属性。
上述几种方法在构建目标特征模型的时候,均需要图像库中具备所有目标特征属性的完备特征信息,忽视了图像库中特征属性元素之间的相互组合利用。当被识别目标的种类发生变化的时候,需要重新训练以完善图像库中的属性特征信息,显然,这将极大地影响目标识别的效率。
为此,本文引入计算机文本检测领域内具有高效率的正则表达式方法,对其在图像目标识别特征模型构建上的语义描述进行引申定义。由于正则表达语义具有较强的灵活性和适配性,当被识别目标发生变化时,利用正则表达式的语义规则能够对图像库中相关特征属性元素进行快速的重新组织,从而能够快速地定义出被识别目标的特征属性模型。
1 正则表达式的语义
1.1 正则表达式的通俗定义
正则表达式是计算机科学中用于检索、替换某些符合某种描述规则的文本所使用的一个概念。正则表达式是对字符串进行描述和通配操作的一种逻辑公式,实现过程是赋予一些特定字符以及这些特定字符的组合已约定好的特殊意义。通过事先定义好的语义规则组成一个“规则字符串”,这个“规则字符串”用来表达对字符串的一种过滤逻辑。如果给定一个定义好的正则表达式和另一个待识别字符串,可以达到如下的目的:
1) 给定的字符串是否符合正则表达式的过滤逻辑(称作“匹配”);
2) 可以通过正则表达式,从字符串中获取我们想要的特定部分。
1.2 正则表达式的特点
1) 灵活性、逻辑性和功能性非常的强;
2) 可以迅速地用极简单的方式达到字符串的复杂控制。
正则表达式的描述因子均为文本模式的字符,包括a-z之间的字母等普通字符和一些特殊符号(称为“元字符”)。通过正则表达式定义出来的描述模式在搜索文本时会匹配一个或多个满足正则语义的字符串。表1中包含了部分元字符以及它们在正则表达式上下文中的行为。
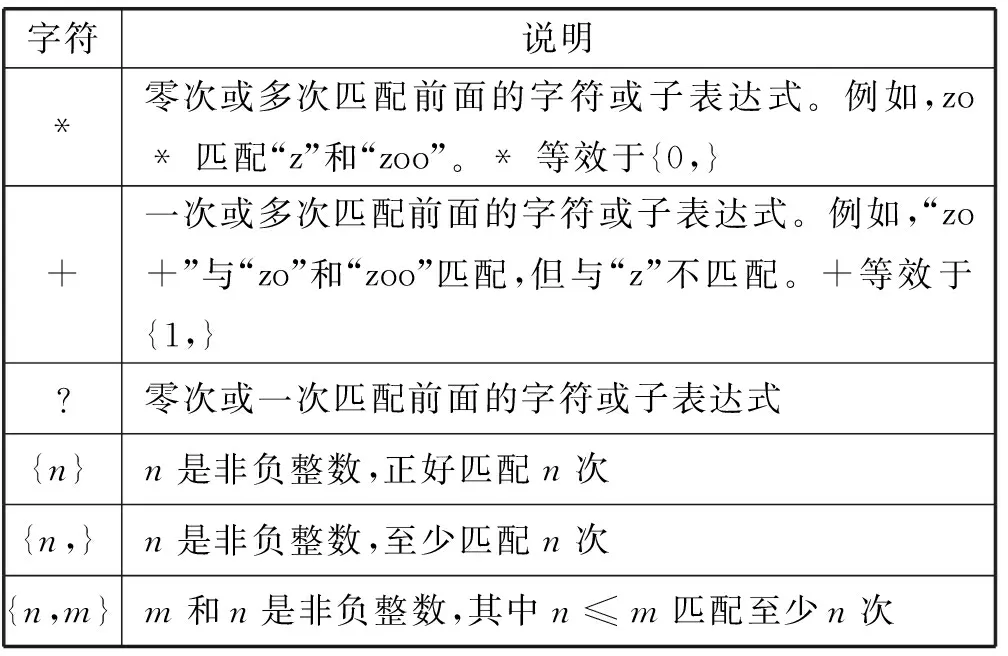
表1 正则表达式的部分语法
表2中通过对正则表达式元字符规则的应用,可以检测和匹配到特定内容的文本,极大地提高内容检索效率。
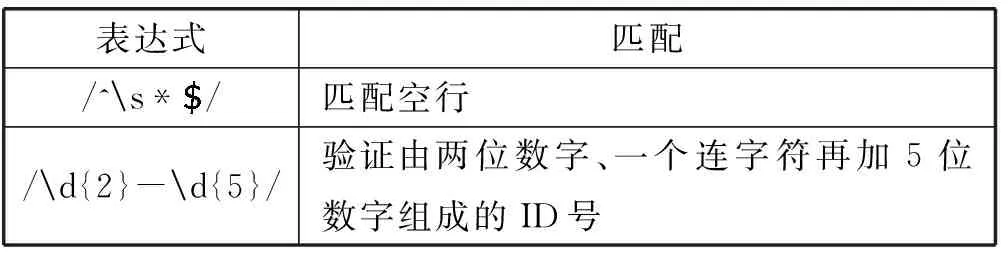
表2 正则表达式示例
1.3 图像中的引申语义
相对于文本对象,用于描述图像特征的“字元素”可以用线条、颜色、形状、位置等来定义。用于描述图像特征的“字元素”可以称之为基础“像元素”。
表3为引申定义用于描述图像特征的部分“像元素”。其中线条按线形可以分为:水平直线、斜线、直角线、弧线、S形弧线等常规线条以及其他自定义线形等。形状库包含:正方形、长方形、圆形、半圆形、菱形、心形等常规形状,以及其他自定义的非常规图形。颜色库通过字母加数字的方式标示,如:W12,其中第一位字母代表色系,后面数字代表亮度,取值范围为0~255之间。位置信息库由完全自定义的符号来描述图像中的相对位置信息,如“|(x1)->(x2)|”代表从像元x1位置开始一直水平向右到像元x2结束,而“|(x1)-^(k)(x2)||”则表示从像元x1开始到其垂直下方像元x2的k处。其中k为可变系数,可以取0~1之间数值,如取0.25表示x1到x2之间距离的四分之一处。此处只是给出了水平和垂直位置信息的基础定义,位置信息的定义符号和定义规则可视实际情况自行定义和添加。本处所描述的像元素库是一个开放式的元素库,用于描述物理特性的技术指标均可以作为像元素库的一个基础指标,如角度信息、温度信息、音色信息、振动信息等均可以作为描述目标的一个元素库指标项进行扩展。把这些像元素按照正则表达式的语法进行组织,能够快速地定义出图像的局部特征。比如:|O(B12)->O(B12)||可以表示图像中匹配水平方向上两个蓝色圆形的部分。当然也可以像定义文本正则表达式一样,用一些更加简洁的字符代表图像正则的“像元素”。
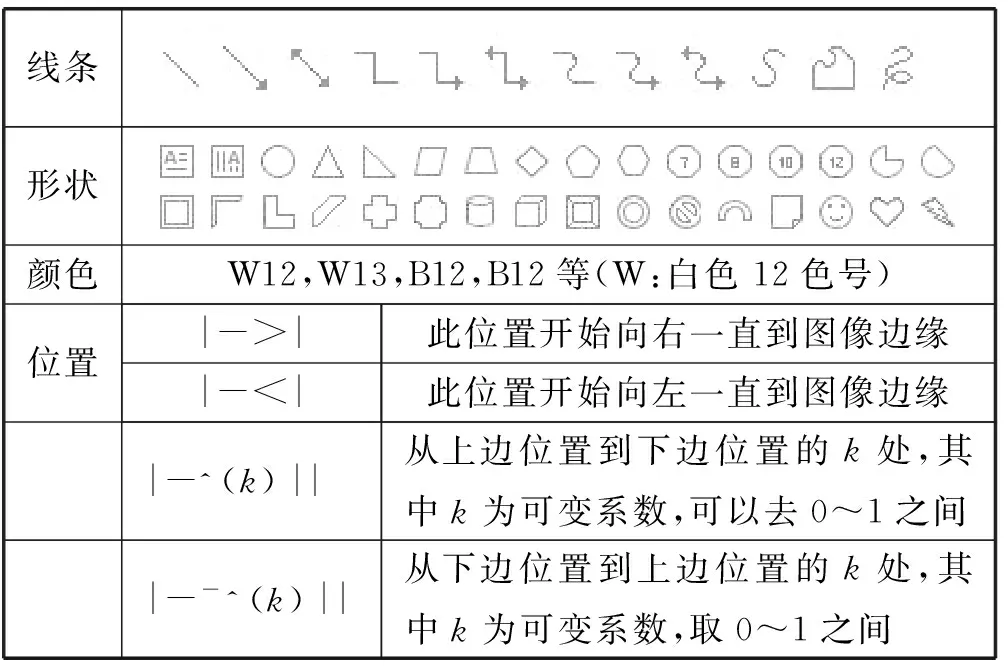
表3 图像特征的像元素
2 基于正则表达的特征提取
2.1 角点特征提取
Harris角度检测是通过数学计算在图像上发现角度特征的一种算法[10],而且其具有旋转不变性的特质。在建立图像匹配的特征正则表达式之前,先通过Harris角点[11]检测出图像特征的“字元素”,数学原理如下所示:
(1)
式中:w(x,y)用以表示移动窗口,I(x,y)表示图像中像素灰度值强度,取值范围为0~255之间。依据泰勒级数计算一阶到N阶的偏导数[12],最后得到一个Harris矩阵公式:
(2)
按照Harris的矩阵计算矩阵特征值λ1、λ2,然后计算获得Harris角度响应值:
R=detM-K(traceM)2detM=λ1λ2traceM=λ1+λ2
(3)
式中:变量因子K[13]为系数值,通常取值范围为0.04~0.06之间。
2.2 距离特征提取
为了提高对位置信息的描述相率,在计算特征向量位置信息时,采用D4模型进行计算:
D4(P,Q)=|xp-xq|+|yp-yq|
(4)
D4距离也就是街区距离,它只选择横竖两个方向计算相对距离。
2.3 颜色特征提取
对每种颜色通道提取一阶、二阶和三阶矩进行统计,设hij表示第i个颜色通道分量中灰度为j的像素出现的概率,n为总像素数目,则颜色矩的三个低阶矩数学表达式为:
(5)
(6)
(7)
这3个低阶矩分别称为均值、方差和偏斜度。
图1是目标原始图,图2是被识别物的边缘连通情况,图3是通过Harris方法得到的角点,所标注的角点是通过连通性选择之后提取的轮廓特征点。在图3的基础上选择最能够描述图像特征的特征点,参照像元素库中的定义提取像元素,见图4。首先对目标外围特征点进行连通性连接,然后在连通图块内部按照最大相似度原则[13]进行像元素的切割。即切割后的局部特征能够在像元素库中找到最相似的“像元素”。在切割后的图4中可以提取到形状像元素:梯形、长方形、圆形。提取到的颜色像元素为:W12(白色12号)、B10(黑色10号),提取到的位置像元素信息为“|-^||”(从上边位置到下边位置)、“|-^(0.25)||”(从上边位置到下面位置的四分之一处)、“|-^|(0.75)|”(从上边位置到下边位置的四分之三处)。最终提取到的基础“像元素”如表4所示。

图1 匹配目标原始图

图2 边缘连通图

图3 角点特征提取

图4 图像像元素提取示例图

形状颜色位置|-^||从上边位置到下边位置|-^(0.25)||从上边位置到下面位置的四分之一处|-^|(0.75)|从上边位置到下边位置的四分之三处
基于表4中的像元素,可以构建出基于像元素的目标匹配正则表达式:
^(0.25)○(B10)|||-^(0.75)○(B10)‖
(8)
按照表达式(4)中正则表达的语义可以快速定义出待匹配目标的特征模型,如图5所示。

图5 特征模型
图5为通过正则表达式(8)所描述出的待识别目标最大相似性特征模型。通过特征模型和待匹配目标所在图的最大相似性比较[14],可以确定出待匹配目标在图中所在位置,如图6所示。

图6 特征匹配图
通过选取167行的特征分布,可以对特征模型和待匹配对象进行特征相似度比较如图7、图8所示。

图7 待匹配目标特征分布
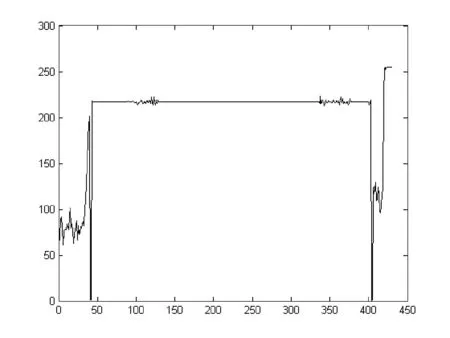
图8 匹配模型特征分布
通过比较可以看出,模型特征的分布基本和待识别目标特征分布情况基本一致,说明利用像元素作为基元的正则表达式完全可以定义出待匹配目标的模型。
3 结果与分析
为了分析基于正则表达式特征提取的效果,使用固定视角下目标图像进行实验。实验中,选取能够最大化反映目标物物理特征的视角进行图像采集。然后通过选取特征像元素库中的基础像元素,在正则表达式的语法组织下快速建立目标特征模型,实现对图像目标的快速识别(见图9)。本实验使用SIFT和SURF两种识别方法作为实验对比,MATLAB11中完成特征建模和目标匹配。表5是对比试验结果,在视角不变情况下,本文方法在识别率和识别时间上均略优于传统的SURF和SIFT算法。

图9 部分训练样本示例
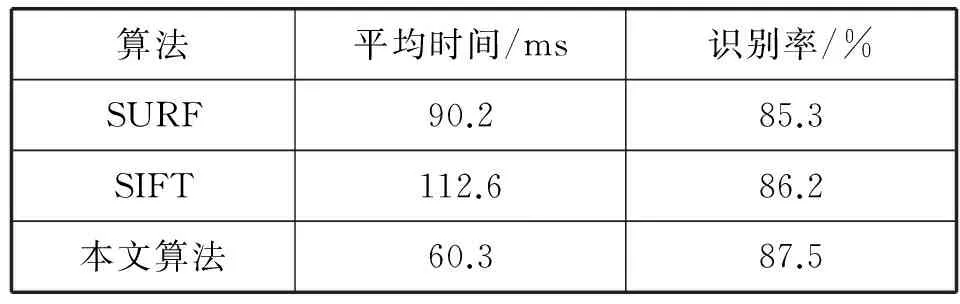
算法平均时间/ms识别率/%SURF90.285.3SIFT112.686.2本文算法60.387.5
4 结 语
基于元字符的正则表达式因其匹配效率高,适配性好,已在文本字符检索中得到了广泛的应用,图像匹配和字符匹配虽然在匹配内容上存在较大差异,但在匹配方法上可以找到其共同性[15]。即都可以通过有规律地组织基础元素构建匹配模型的方法,对目标进行识别。基于此点共同性,本文将正则表达式的语义通过赋予图形属性特征进行了引申定义,引入了“像元素”的新概念和语义规则。实验表明,通过编写图像匹配正则表达式,完全能够快速、便捷地建立图像特征匹配模型,达到目标图像快速识别的目的。
[1] Wu Bin,Zhou Hongyan.Image feature extraction method of planar target based on homography[J].Society for Optical Engineering,2011,357:632-640.
[2] Mei C,Gong Z,Wu D Q,et al.A pattern recognition method based on linguistic ordered weighted distance measure[J].Journal of Intelligent & Fuzzy Systems Applications in Engineering & Technology,2014,27(4):1897-1903.
[3] Licsár A,Szirányi T.Supervised training based hand gesture recognition system[C]//International Conference on Pattern Recognition,2002:999-1002.
[4] Tekin N,Peker K A.Matching day and night location images using SIFT and logistic regression[C]//Signal Processing and Communications Applications Conference.IEEE,2015:1615-1618.
[5] 林晓帆,林立文,邓涛.基于SURF描述子的遥感影像配准[J].计算机工程,2010,36(12):216-218.
[6] 宋芳琴.基于Union-Find的图像聚类方法[J].计算机应用与软件,2015,32(7):319-322.
[7] Vailaya A,Figueiredo M A T,Jain A K,et al.Bayesian framework for semantic classification of outdoor vacation images[C]//Storage and Retrieval for Image and Video Databases VII.Storage and Retrieval for Image and Video Databases VII,1998.
[8] Town C P,Sinclair D.Content based image retrieval using semantic visual categories[R].Cambridge:AT&T Lab,2000.
[9] Farhadi A,Endres I,Hoiem D,et al.Describing objects by their attributes[C]//Computer Vision and Pattern Recognition,2009.CVPR 2009.IEEE Conference on.IEEE,2009:1778-1785.
[10] Wang D,Zhang B,Zhang P,et al.An online core vector machine with adaptive MEB adjustment[J].Pattern Recognition,2010,43(10):3468-3482.
[11] Wang W,Tang Y P,Ren J L,et al.Improved algorithm for Harris corner detection[J].Optics & Precision Engineering,2008,16(10):1-4.
[12] Wang X G,Wang Z H,Wu F C.Harris correlation and feature matching[J].Moshi Shibie Yu Rengong Zhineng/pattern Recognition & Artificial Intelligence,2009,22(4):505-513.
[13] Ryu J B,Park H H.Log-log scaled Harris corner detector[J].Electronics Letters,2010,46(24):1602-1604.
[14] 叶鹏,王琰.基于融合图像特征的角点提取方法[J].沈阳理工大学学报,2010,29(2):74-76.
[15] 邵翔宇,刘勤让,谭力波.基于规则模板的正则表达式分组算法[J].电子学报,2016,44(1):236-240.
[16] Blasch E P,Huang S H.Multilevel feature-based fuzzy fusion for target recognition[C]//Proceedings of SPIE- The International
Society for Optical Engineering,2000,4051:279-288.
[17] Ding J,Liu H W,Wang Y H,et al.SAR Target Recognition by Combining Images of the Shadow Region and Target Region[J].Journal of Electronics & Information Technology,2015,37(3):594-600.
[18] 陈世伟,杨小冈,张胜修,等.基于自适应上下文信息的目标相对定位方法[J].系统工程与电子技术,2016,38(5):984-989.
[19] 贾平,徐宁,张叶.基于局部特征提取的目标自动识别[J].光学精密工程,2013,21(7):1898-1905.
