空间碎片软捕获姿轨控模型构建与仿真
2018-05-03刘志威董正宏叶新杨帆
刘志威,董正宏,叶新,杨帆
空间碎片软捕获姿轨控模型构建与仿真
刘志威1,董正宏2,叶新1,杨帆2
(1. 航天工程大学 研究生院; 2. 航天工程大学 航天信息学院:北京 101416)
为构建利用柔性机械臂捕获空间碎片的系统仿真模型,首先分析梳理空间碎片捕获典型任务流程,包括轨道转移、位置保持、路径规划、动量稳定控制等阶段;然后针对任务流程分别搭建基于SimuLink的路径规划、动量缓冲控制、姿态控制、动力学和轨道仿真等子系统;各个子系统之间以TCP/IP的方式进行数据交互,最终完成空间碎片软捕获任务姿轨控仿真系统的构建。
柔性机械臂;空间碎片移除;姿轨控;系统仿真
0 引言
空间碎片对在轨航天器的安全构成严重威胁,尤其是中等尺寸碎片(1~10cm)的撞击会使航天器姿态和轨道发生改变,甚至导致航天器损毁。
针对中等尺寸空间碎片,可以采用主动移除的方式进行清理。空间碎片属于典型非合作目标;多国对利用带有机械臂的空间机器人捕获非合作目标进行了研究[1-2]。美国的FREND机械臂[3-4]和日本的JEMRMS机械臂[5-6]等均在空间进行过抓捕非合作目标的试验;国内的哈尔滨工业大学[7]、北京邮电大学[8]和航天工程大学[9]等单位也对空间机械臂技术开展了相关研究。
传统的刚性机械臂由于其关节和臂杆均为刚性,在末端和非合作目标接触碰撞时会产生瞬间冲量,极易导致基座翻滚,使任务失败[2]。利用柔性机械臂技术捕获空间碎片可以克服刚性机械臂动量不可控的缺点。然而国内尚没有利用柔性机械臂系统进行空间碎片捕获的仿真系统。
本文分析梳理典型空间碎片捕获任务流程,构建各任务阶段的仿真模型,并在此基础上搭建仿真系统,以实现空间碎片软捕获的模块化和可视化。
1 需求分析和框架设计
1.1 任务流程与仿真需求
无论空间机器人执行何种任务,都需要通过近距离操作来完成,本质上都属于航天器相对运动的范畴。对于抓捕类的航天任务,任务过程设计需要从与目标交会、近距离捕获、转移释放等阶段进行分析。典型空间碎片捕获移除的流程如图1所示,任务流程与系统仿真需求的对照分析见表1。

图1 典型空间碎片捕获移除流程

表1 任务流程与系统仿真需求对照分析
1.2 框架设计
本节主要进行空间碎片软捕获总体研究方案的设计,从不同层级和角度展开研究[10]。
如图2所示,为完整地表示空间碎片软捕获仿真流程,需要构建以下仿真子系统:卫星轨道仿真子系统主要用于轨道机动的三维和二维显示,可以利用STK与VS联合仿真的方式进行设计与实现;动力学仿真子系统主要用于柔性机械臂系统的姿态显示,可以基于UG NX进行动力学模型的构建;三轴稳定控制子系统、路径规划子系统和动量稳定控制子系统分别用于轨道机动、路径规划和动量控制,可以利用MatLab/SimuLink进行模型构建;数据管理子系统用于初始化参数的输入和任务流程编辑,主要基于VS实现;数据交互调度子系统用于各个子系统之间的数据交换,主要基于VS实现。

图2 空间碎片软捕获仿真系统设计框架
2 系统集成
2.1 仿真系统运行控制流程
结合空间碎片软捕获的任务流程以及仿真系统的结构设计,可以分析得到仿真系统的运行控制流程。
图3为基于任务与应用逻辑映射的仿真系统数据流程。初始化阶段由可视化任务编辑系统向各个子系统发送初始化指令,设置各个系统的初始化状态。轨道转移和带载转移阶段,姿态控制子系统将轨道控制数据通过接口调度子系统传输给轨道仿真子系统。位姿保持、路径规划和缓冲控制阶段,姿态控制数据输出给动力学子系统;动力学子系统输出姿态数据,并通过接口调度子系统传输给轨道仿真子系统。停止阶段,任务编辑系统向各个子系统发送停止指令,停止各个系统的仿真运行。

图3 基于任务与应用逻辑映射的仿真系统数据流程
2.2 仿真系统数据交互结构
根据上述仿真系统的结构及其运行控制流程可知,交互数据类型包括仿真控制指令、初始化数据、轨道控制数据、姿态控制数据、轨道输出数据和姿态输出数据。其数据交互机制如图4所示。

图4 仿真系统数据交互机制
3 系统构建与实现
3.1 动力学子系统
关节机理模型设计一方面要在灵活度、工作空间、复杂度等方面满足路径规划需求;另一方面要能够减小卫星平台受到的干扰动量,并可通过一定的协同控制将脉冲式传递转化为谐波式传递,以满足干扰动量控制需求。因此,关节机理模型设计必须包含刚性传动单元和柔性可控阻尼单元2大功能模块。柔性机械臂关节机理及三关节机械臂系统的三维模型如图5所示[9]。

图5 柔性机械臂关节与系统模型
基于UG NX的空间机器人动力学模型进行动力学仿真的流程如图6所示。本文的仿真设计过程中,主要通过控制关节旋转副的扭矩来实现空间机器人的运动仿真,因此为3个关节各自的俯仰轴、偏航轴设置扭矩。输入形式为函数驱动,工厂输入就是扭矩函数;工厂输出设置为基座、关节、末端执行器的位移、角度、速度/角速度、加速度/角加速度。解算器分析类型为控制/动力学,解算方案类型为常规驱动,重力参数为0。对解算器进行求解,可以得到包含空间机器人控制/动力学的.m文件,运行产生.mdl文件,可以集成到SimuLink之中进行解算。

图6 基于UG NX的动力学模型构建
3.2 路径规划子系统
路径规划控制子系统主要包括空间机器人路径规划算法模块、NX动力学模型模块、数据传输与处理模块和网络通信模块4部分。
各模块之间关系如图7所示:路径规划算法模块是基于广义雅可比矩阵的运动学逆解构建的[11],利用MatLab/SimuLink进行封装,输入为末端执行器的初始及终了位姿,输出为空间机器人关节的角度序列;NX动力学模型模块接收关节角速度序列并进行动力学解算;数据传输与处理模块则用于对接收和发送的数据进行解析和封装;网络通信模块负责以TCP/IP协议规范的形式接收和发送指令及数据。

图7 路径规划子系统SimuLink模型构建
3.3 动量缓冲控制子系统
本节对空间软接触机构与目标星碰撞后的缓冲过程方法进行研究。实际任务中,往往存在由于目标卫星对空间机器人的碰撞动量过大而导致空间机器人翻滚失控的风险,因此应控制空间机器人的基座所受到的扰动,越小越好。以空间软接触机构基座受到的干扰动量最小为期望函数,提出各关节驱动力矩的最优控制方法,如图8所示。

图8 动量缓冲控制子系统SimuLink模型构建
3.4 姿态控制子系统
空间机器人三轴姿态控制使空间机器人相互垂直的3个轴(本体轴)在空间相对于某个参考系具有预期方向。三轴姿态控制系统包括姿态敏感器、姿态控制器和姿态控制执行机构。卫星姿态控制基本原理如图9所示,姿态控制器的输入为本体系相对轨道系的欧拉角偏差,输出为本体系三轴输出的控制力矩。
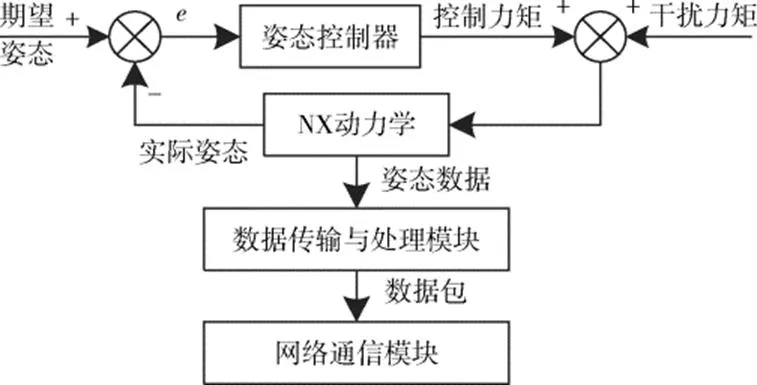
图9 姿态控制子系统SimuLink仿真模型构建
3.5 轨道仿真子系统
为了构建轨道仿真子系统中空间机器人的三维可视化模型,需要将UG NX软件中已经构建好的柔性臂模型转换为可被STK模块加载的.mdl格式,完成轨道仿真子系统中的柔性臂模型。模型格式转换的流程如图10所示。

图10 柔性臂模型格式转换流程
空间机器人轨道仿真子系统应能在接收到上述4个子系统传来的轨道和姿态数据后,实时地显示空间机器人进行轨道转移、路径规划和碰撞后稳定控制阶段的空间姿态。因此,轨道仿真子系统应包括网络通信模块、数据传输与处理模块、姿轨仿真场景模块[12],如图11所示。

图11 轨道姿态仿真子系统模型组成
网络通信模块接收其他子系统发送的消息,再通过数据传输与处理模块对消息进行解析,根据相应指令变更场景的运行状态,或者利用控制系统提供的空间机器人姿态数据,在实时推进卫星轨道状态的同时改变三维场景中空间机器人姿态,实现轨道与姿态的同步仿真,并输出星历数据。数据传输与处理模块负责本子系统数据和指令的接收、分发、解包和打包,网络通信模块则负责与接口调度子系统进行通信。应用程序对象接口组件模块用于接收STK/X组件的场景变更命令,传输至STK分析引擎并输出各项实时场景参数。二维显示模块和三维显示模块分别负责二维空间卫星轨道实时态势和三维空间卫星姿轨实时态势的显示。空间仿真环境分析模块负责空间仿真环境的构建与分析。
按照第2章分析得到的任务流程,在构建轨道仿真系统时需要借助STK API函数,提供场景的载入和初始化,设置模型和关节,轨道机动,仿真推进,以及空间机器人姿态更新与参数输出。具体功能如表2所示。

表2 轨道仿真API函数
4 仿真案例
按照上述的仿真流程进行仿真案例设计,仿真参数和仿真结果如下。
4.1 仿真参数
姿轨控仿真的初始参数包括柔性机械臂参数和空间碎片捕获姿轨仿真参数,具体设置见表3和表4。

表3 柔性机械臂参数设置

表4 空间碎片捕获姿轨仿真参数设置
4.2 仿真结果
1)路径规划结果
路径规划结果如图12所示,可以看出末端的位置和姿态均已规划到期望的结果,说明可以采用基于运动学逆解进行关节角速度规划。

图12 路径规划的关节角速度序列与三维显示
2)缓冲控制结果
图13为空间柔性机械臂系统在、、方向的动量缓冲控制效果,可以看出动量逐渐衰减,未对基座产生剧烈影响。结果表明,以基座加速度最小为期望函数,利用线性二次型控制算法可以得到相应的最优控制力矩,能够比较好地完成碰撞动量的缓冲过程。

3)姿轨仿真结果
图14为姿轨仿真结果,可以看出采用VS与STK联合仿真的形式能够完成对柔性机械臂系统的加载和姿轨显示,采用霍曼转移算法能够得到柔性机械臂系统轨道转移速度,达到接近空间碎片的目的。

图14 姿轨仿真场景与数据输出
5 结束语
本文分析梳理了利用柔性机械臂系统捕获空间碎片的典型任务流程,针对各个任务阶段分别搭建了基于SimuLink算法模型封装的柔性机械臂动力学、路径规划、动量缓冲控制、姿态控制子系统和基于VS & STK的姿轨仿真子系统。各个子系统的各种算法均可以基于SimuLink进行构建封装,具有模块化的特点,便于封装或者替换成其他算法。
由于本文构建的仿真系统各个子系统之间以TCP/IP的方式进行数据交互,在数据交互实时性上还有改进空间,这也是下一步研究的重点。
[1] 张文辉, 叶晓平, 季晓明, 等. 国内外空间机器人技术发展综述[J]. 飞行力学, 2013, 31(3): 198-202
ZHANG W H, YE X P, JI X M, et al. Development summarizing of space robot technology national and outside[J]. Flight Dynamics, 2013, 31(3): 198-202
[2] 闻新, 李东江. 美国自主交会技术验证卫星[J]. 中国航天, 2006(12): 31-34
WEN X,LI D J. US autonomous rendezvous satellite DART[J]. Aerospace China, 2006(12): 31-34
[3] MEIROVITCH L, LIM S. Maneuvering and control of flexible space robots[J]. Journal of Guidance Control & Dynamics, 1994(3): 23-40
[4] ROMANO M, AGRAWAL B N, BERNELLIZAZZERA F. Experiments on command shaping control of a manipulator with flexible links[J]. Journal of Guidance Control & Dynamics, 2002, 25(2): 232-239
[5] OTSUKI M. Flexible space robotic manipulator with passively switching free joint to drive joint[C]//IEEE International Conference on Robotics and Automation. Anchorage, Alaska, 2010: 1169-1174
[6] ABIKO S, YOSHIDA K. Adaptive reaction control for space robotic applications with dynamic model uncertainty[J]. Advanced Robotics, 2010, 24(8/9): 1099-1126
[7] 潘冬. 空间柔性机械臂动力学建模分析及在轨抓捕控制[D]. 哈尔滨: 哈尔滨工业大学, 2014: 1-3
[8] 张晓东. 空间柔性机械臂控制策略研究[D]. 北京: 北京邮电大学, 2009: 145
[9] 董正宏, 王珏. 空间目标在轨软接触技术[M]. 北京: 国防工业出版社, 2017: 3-6; 66-72
[10] LIU Z, YANG F, DONG Z, et al. The design of space debris removed simulation system based on flexible arm[C]//International Conference on Advanced Robotics, IEEE. Hong Kong, 2017
[11] 徐文福. 空间机器人目标捕获的路径规划与实验研究[D].哈尔滨: 哈尔滨工业大学, 2007: 47-67
[12] YE X, DONG Z H, PAN Q, et al. Application of the IOCP in multi-domain modeling and simulation based on multiple interfaces of satellite[J]. Advanced Materials Research, 2014(1049/1050): 1923-1928
(编辑:张艳艳)
Construction and simulation of the attitude and orbit control model for space debris removal with flexible arm
LIU Zhiwei1, DONG Zhenghong2, YE Xin1, YANG Fan2
(1. Graduate School,Space Engineering University; 2. Department of Space Information,Space Engineering University: Beijing 101416, China)
To establish a system model for simulating a space robot with a flexible manipulator to capture the space debris, this paper proposes a typical flowchart for the whole process, including the phases of the orbit transfer, the station keeping, the path planning, and the momentum stability control. According to the flowchart, the path planning, the momentum buffering control, the attitude control, the dynamics and the trajectory simulation subsystem are implemented with the SimuLinK software. Those subsystems exchange data based on the TCP/IP, for the construction of the attitude and orbit control simulation system of the space debris removal with a flexible arm.
flexible arm; space debris removal; attitude and orbit control; system simulation
V11
A
1673-1379(2018)02-0141-07
10.3969/j.issn.1673-1379.2018.02.007
刘志威(1993—),男,硕士研究生,主要研究领域为空间机器人控制;E-mail: lzw2800@163.com。指导教师:董正宏(1977—),男,博士学位,副教授,主要研究领域为空间机器人控制。
2018-01-18;
2018-03-09
