AGV控制系统的设计与研究
2018-04-27张松林
张松林
(安徽信息工程学院 信息工程系, 安徽 芜湖 241000)
AGV出现于上世纪70年代,经过多年发展,已经突破了多项技术,并且进入成熟阶段。AGV在我国应用空间巨大,在国际市场上也逐渐凸显其重要性。但是,由于我国工业水平和科技水平低于发达国家,因此,其发展速度较慢,受到的限制较多。随着改革开放的深入,我国经济发展速度加快,成为了全球第二大经济体。2013年,为促进工业化进程,加快工业AGV的快速发展,我国提出了《工业和信息化部关于推进工业机器人产业发展的指导意见》,支持AGV产业的发展。目前,中国已经成为全球AGV市场需求量增速最快的国家,并保持着36%的年增长率。目前,我国将研究重点放在降低AGV生产成本、提高其操作性、扩大其普及范围等方面,致力于将其应用于我国各行各业,解决劳动力缺乏问题,使我国工业生产更加规范化。
1 AGV控制器的发展现状
1.1 控制系统发展现状
AGV能够装载一定的物体,从出发地自动运行至目的地。该设备中安装有自动引导装置,可以为设备提供自主执行导航、路径规划、交通控制、通信、驱动控制、负载舱或工作逻辑控制和安全防护等功能,现在都用激光来引导装置运行。AGV主要用于制造业和仓储业,大大节约劳动力,也会减少人为因素造成的商品破损问题。同时,有些服务行业也开始使用AGV设备,例如机场和图书馆等,这些场合工作量大,并且要求较高的服务质量,使用自动化设备既能够吸引使用者的注意力,也能够极大地满足了使用者的需求。由于我国各行各业电子商务发展速度较快,因此,国内物流行业对运动控制器的需求量也越来越高,自动化设备的使用领域增多。
现在市场中常见的是激光引导AGV控制系统,该系统的运动控制器分为PLC控制器、嵌入式控制器和基于计算机的控制器等。又可以将这些运动控制器分为集成式控制器和开放式控制器两大类,在使用过程中,将其分为三个层次,分别为中央控制中心、作业控制或分布式交通控制。从近些年来激光引导AGV控制系统的情况来看,其集成式控制系统主要是作业控制,由中心控制系统指导整个系统作业,而分散控制系统主要用于分布式交通控制,该系统可以与其他独立系统相互通信,其工作效率较高。
1.2 AGV系统未来发展趋势
目前,自动化控制领域控制器发展速度和需求量高于控制系统发展速度和需求量,控制器硬件系统主要是保证设备具有足够快的执行相应控制算法的速度,使一些传感器能够与电脑或其他便携电子交通设备相连接,便于调试。现在一些高质量的控制器制造技术和相关的调试技术都引进于国外,而硬件设备发展正往减小体积、降低重量、减小成本方向发展。我国电机驱动和控制系统发展速度虽然较快,但是与发达国家之间还存在较大的差距,主要表现在电机制造与装配还在依赖手工、工艺落后,电机集成度水平不高等方面。近些年来,我国控制器行业迎来新的发展机遇,其销售量以每年19%的速度增加,许多研发企业与销售企业合作,深入研究和改善控制器的性能与结构,现在我国PLC控制器市场份额达到55%以上,但是控制器在其通讯、数据传输和功能处理等方面还有待提高,学者及技术人员未来应主要在此方面进行深入研究,扩大其生产规模,使设备性能更加灵活,降低我国劳动力成本等。
2 AGV控制系统结构设计
机器人从最开始的单一功能,发展成为多功能的集成机构。现在国外已经研究出能灵活行动和做一些简单工作的机器人。机器人研究中应重视其结构设计,尤其是质量分布、重心位置和执行机构的选择等。现在常见的AGV车轮结构有三轮式、四轮式两种。三轮式结构承载的负荷小,行走速度快,转向灵活,但是这种结构对于运行算法的精密度要求较高;四轮式结构常用于大型货物运输,负荷较大,运行速度慢,转向能力差,对其运行算法要求也较高,四轮式结构中含有两个连有驱动电机的车轮,两个由万向轮作为支撑和转向的车轮,能够使该装置灵活转向。灵活度越好,对设计的算法要求越高。
AGV结构如图1所示,其中1是超声波传感器,主要分布在装置的扇形区表面,能够360度检测装置周围的信号,2是万向轮,主要负责装置转向的零部件,3是电机驱动轮,其连有一个伺服电机,4是电池,5是直流无刷伺服电机,6是伺服电机控制器,7是激光扫描仪。三轮式AGV结构与四轮式AGV结构的差异在于电机驱动轮的个数,个数越多,载负越大,移动过程中越平稳。
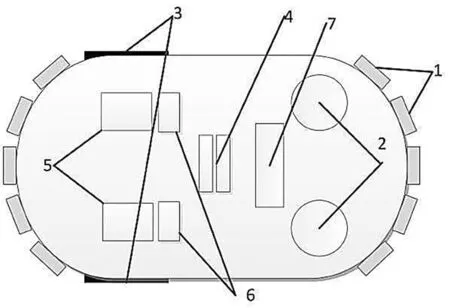
图1 AGV结构示意图

图2 AGV系统组成示意图
AGV结构中的主要模块如图2所示。从图中可以看出,主控制单元可以控制设备运行加减速以及原地滑动和转弯等操作,电机控制器控制驱动单元的驱动电机运行方向和速度,AGV在运行过程中,会经历直行、拐弯和接近停位点等,这些操作需要运动控制器的软件辅助进行,工控机在接收到转弯或者是停车指令后,将信息反馈给软件控制系统,软件控制系统修改现行的代码,并将新的代码发布给速度控制端口,工控机在修改运行速度的同时也控制电机运动状态,并将状态反馈给主控制单元,主控制单元将信息反馈给安全与辅助单元,以此识别前方是否存在障碍,并预防事故发生。
3 控制系统硬件设计与开发
3.1 激光导引控制系统
控制系统是控制AGV设备的运行,并且是该系统的主要控制中心,现在常用的控制系统是Beagle Bone AM335X开发板安装Ubuntu系统和ROS机器人平台作为上层的操作系统,两大系统联合起来发布各种运行指令,保证设备平稳,安全运行。如图3控制系统硬件结构组成图所示,两大结构组成的控制系统使整个结构的软硬件具有无关性,并且可以通过远程终端来控制整个机器运行过程。

图3 控制系统硬件结构组成框图
3.2 扫描系统
现在电子商务发展速度加快,物流行业已进入一个前所未有的发展高峰,为减少服务行业中劳动力缺乏问题,在行业内大量引入激光引导机器人,推动我国AGV车体控制系统发展逐渐趋于成熟。通过AGV在我国的发展情况来看,其引导方式成为生产行业和物流行业选择该设备类型的主要指标,AGV的引导方式决定该结构能在什么样的环境下工作,目前最多的是使用高精度激光扫描仪引导设备运行,设备用于室外时,扫描仪会检测周围环境,在系统内部形成一幅地图,并且实时更新,系统内部会根据扫描的地图规划行走路径。与普通的扫描仪不同,高精度扫描仪扫描的图像是3D形式的,不同的颜色代表不同的像素值,而像素值与距离相关。激光扫描仪的基本技术是通过红外激光二极管发射红外线,使用传统的红外敏感相机,接收不同位置的反射光线,描述成一张图像信息。激光扫描仪对障碍的识别能力强,反应速度快,使运行设备能够在狭小的空间内迅速规避障碍,安全运行。
3.3 驱动系统

图4 AGV驱动转向系统示意图
现在各行各业对于AGV设备的功能需求不同,因此,对其驱动装置要求较高。驱动系统是车动作的控制部分,一般是由两个驱动轮、两个万向轮组成,再安装直流伺服电机、霍尔传感器等装置来控制加速和减速过程。AGV的驱动系统伺服电机、减速器、车轮的构成方式如图4所示,该组成结构中,车体结构主要采用铝制品材料,使整个车体的质量在原有的基础上得到降低,整个车体运行的阻力减少,降低电力资源浪费。
3.4 防碰撞系统

图5 超声波测距示意图
AGV的防碰撞系统由急停开关、碰撞开关、超声波传感器和激光四部分组成。超声波传感器主要用来扫描周围环境,超声波测距示意图如图5所示。超声波传感器连接微控制器,占用一个I/O口,该设备不断发出固定频率的超声波信号,当超声波与周围障碍物接触时,超声波会受到阻碍,其波长发生变化,该信息会被设备所监测到,同时记录障碍物的距离和大小,误差在2厘米到3厘米之间。由于超声波传感器自身的特性,其声波入射角度超过20度,传感器的读数常常会发生跳变或接收不到正确的传感数据。
4 控制器硬件设计
4.1 控制器硬件设计方案
可编程逻辑(PLD)的逻辑功能是用户根据自身需要,依据编程逻辑器件编程设立的系统开发人员使用该行业专用的软件工具对其进行开发、仿真和测试,优化可编程逻辑。PLD可以对设计阶段的各个数据进行修改和储存,将修改的数据经过专业软件进行测试并优化,达到最符合要求的编辑逻辑。该过程可以降低系统开发的成本,减少工作量等。AGV的直流无刷伺服电机控制器方案如图6所示。该控制电机具有适应性强、功能多、操作简便等特点,经过试验证明,以该电机控制方案制造出来的设备其反应时间较短,灵敏度高,性价比高。

图6 AGV的直流无刷电机控制方案
4.2 直流伺服电机驱动
现在AGV设备中常使用FN3788电机驱动设备,能够驱动高压元器件,但是,由于其芯片承载负荷较小,在发展中受到限制。FN3788电机驱动设备可以运用于电压低于600伏以下的电子驱动系统中,并且该设备自带保护系统,当电压过高或者是电流过高时,可切换进入保护状态,并且在整个过程中其耗电量较低,整个电路系统较为简洁,后期检修工作较简单。
4.3 速度环

图7 无刷直流电机的驱动与测速
速度环与设备的转速相关,对速度环的控制精度越高,整个设备运行越平稳,并且其抗干扰能力较强。在AGV控制系统中,使用霍尔传感器精确控制伺服电机的转速,并且整个系统的控制指令也是由霍尔传感器传递给伺服电机驱动器,以此形成封闭的速度环,如图7所示。霍尔器件作为电子转换器件,当系统发生转变时,霍尔器件可以控制电路的运行方向,从而达到切换指令的目的。并且从图中可以看出,霍尔器件受到磁铁的影响,其工作状态也受到影响,当旋转磁场的南极经过霍尔传感器时,霍尔传感器就切换到工作状态,当旋转磁场的北极经过霍尔传感器时,霍尔传感器切换到释放状态。除了上述3个重要的硬件外,控制器硬件还包括位置环、通讯设备以及控制系统软件,这些已经受到很多学者的研究,技术已经达到成熟。本文重点研究了我国AGV控制系统的硬件部分,强调各个零部件之间的相互影响,介绍零部件的重要性。
5 结语
目前,研究出性价比高、操作简便且运行灵活的AGV设备是很多学者集中研究的课题之一,也是社会发展的必然选择,物流行业对运输货物的完整程度要求较高,工作人员会因为身体疲劳而对货物产生损伤,并且工作人员的负荷也较高,引进AGV设备是现在物流行业必然选择。本文对此进行深入研究,重点阐述AGV控制系统的硬件部分进行叙述,为该设备发展提供理论资料,由于其测试软件现在也较为成熟,因此未对其进行深入探究。
参考文献:
[1] 孙凌. AGV远程控制系统设计与实现[D].南京:南京邮电大学,2015.
[2] 王忠海. 激光导引AGV控制系统的研究与设计[D].南昌:江西理工大学,2015.
[3] 胡蝶. 自动导引车(AGV)控制系统的研究与设计[D].武汉:湖北工业大学,2014.
[4] 张欢,秦刚. AGV自动引导车控制系统的设计与研究[J]. 企业导报,2012(21):297.
[5] 廖洵. 自动导向车(AGV)控制与检测系统的研究与设计[D].武汉:湖北工业大学,2012.