自动巡航式无人驾驶投饵船的研制*
2018-04-27李明郑文钟洪一前
李明郑文钟洪一前
水产养殖在浙江省农业中占有重要地位。据统计,2016年全省渔业总产值为962.01亿元,占农林牧渔业总产值比例为30.58%;同期淡水渔业产值为234.93亿元,占渔业产值比例为24.42%[1]。投饵作业是水产养殖的一个重要环节。目前国内水产养殖投饵作业主要有人工投饵和简易机械投饵两种方式。人工投饵存在劳动强度大、喂料技术因人而异、饲料落点不均匀等缺点,进而带来局部水域饵料残留过多、水体环境恶化等问题;简易投饵机虽然目前国内使用范围较广,但此类投饵机大多存在定时不准确、可靠性低、投饵与间歇时间设置不合理、投饵距离不可调、饵料损耗高和储料量小等诸多缺点。由此可见,现行的人工投饵和简易投饵机均无法适应当今国内水产养殖规模化、现代化和自动化发展的需要。鉴于此,在参考借鉴国内外有关水产养殖自动投饵机械研制相关文献的基础上[2-4],结合水产养殖工艺对投饵作业的要求,利用GPS导航、自动控制、信息通讯等高新技术研制一种自动巡航式投饵船,并进行相关试验,以期为加快水产养殖现代化和推进水产养殖“机器换人”提供装备技术支撑。
1 总体结构和主要指标
1.1 总体结构设计
不同的水产养殖品种对饲料投喂要求是不同的。如对虾有群聚且活动区域相对固定的特性,根据对虾这一生活习性,投饵船在进行饲料投喂时,要与堤岸保持一定距离且以一定速度沿池塘岸边航行;而鱼类则没有与对虾类似的生活习性,生活区域不固定。为适应不同种类水产养殖对象的饲料投喂要求,投饵船设计时确定了两种工作模式即手动遥控和自动巡航两种工作模式。在手动遥控模式下,投饵船的航向和航行速度由操作人员控制;在自动巡航模式下,控制系统根据自身获取的探测信息自动调整投饵船的航行速度和航向。根据投饵船的功能要求和设计目标,投饲船结构及设备布置如图1所示。
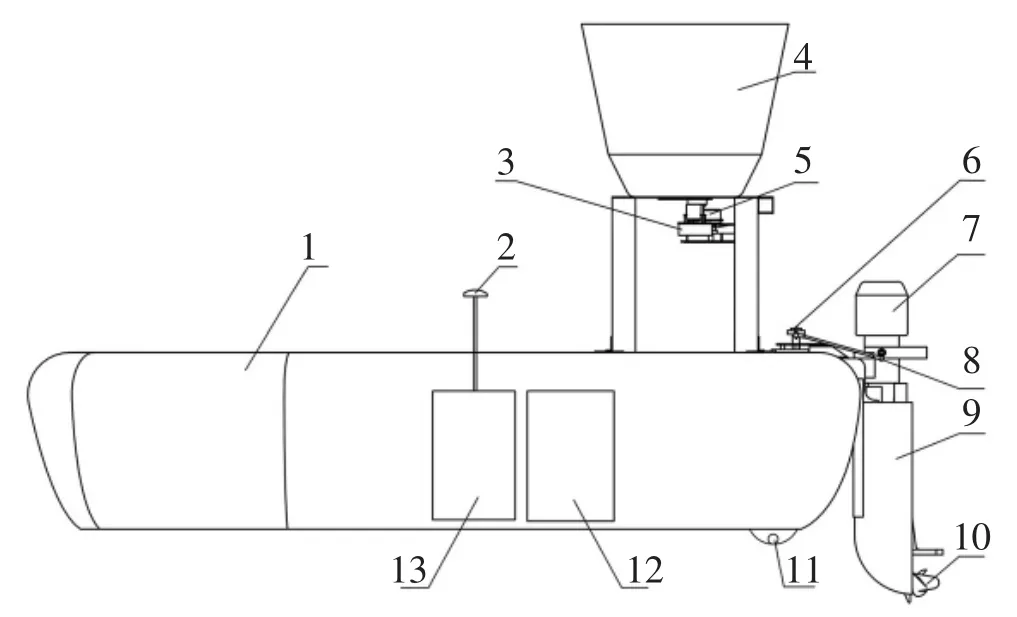
图1 投饵船结构示意图
1.2 主要性能指标
根据鱼、虾等水产动物品种的养殖技术规程和日常操作规范,结合南方地区池塘的地形、地貌、气候等自然条件,确定设计无人驾驶投饵船应满足的主要技术指标如表1所示。
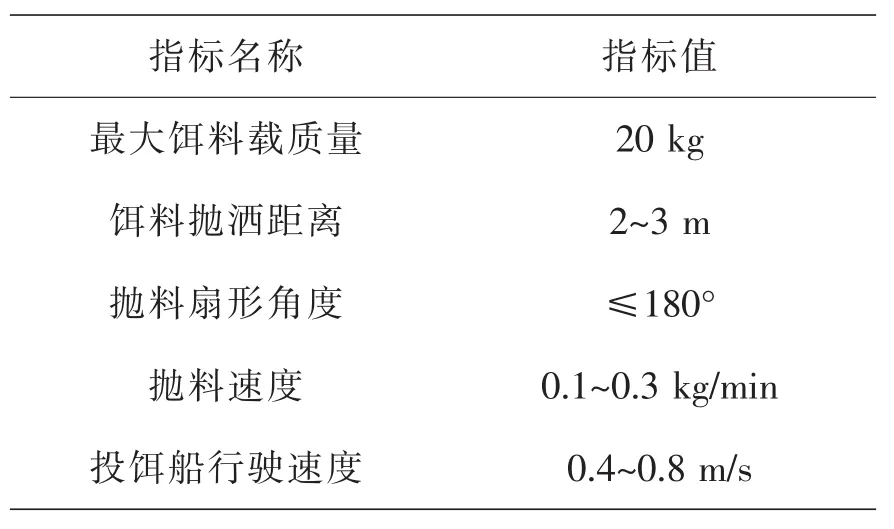
表1 研制开发投饵船的主要性能指标
2 样机组成系统部件设计
2.1 行走系统
投饵船在作业水域的行驶过程可分解为直线行驶和转弯2个基本运动。要完成上述基本运动,需要行走装置、转向装置及控制系统的三者配合。
(1)行走装置。投饵船的行驶需要船体和相应驱动装置的配合。根据研制投饵船的相关技术性能指标,投饵船采用船体尺寸为235 cm×105 cm×43 cm(长×宽×高)的平底船,选择浙江省台州市光悦游艇有限公司生产的48V4.0HP无人船推进器作为动力推进装置,为船体前进提供所需的推力,该无人船推进器具有体积小、质量小、易于控制等特点。
(2)转向装置。投饵船行驶时改变航向就能实现转弯。转向装置主要由航向控制器、控制连杆和水刀三个部件组成。根据所用平底船的结构特征,在平底船尾部加装了两块50 cm×15 cm(长×宽)且相距20 cm的塑料薄板作为投饵船的水刀,航向控制器在投饵船行驶中接收到巡航控制系统指令后,通过控制连杆改变电动螺旋桨的推进方向,实现投饵船转向即航行路线和航向的改变。
2.2 投喂系统
精准投喂是本样机研制的主要目标之一。实现投饵船精准投喂需要在饲料投放前了解鱼(虾)在养殖池塘中的空间分布。投喂系统由以下两部分构成。
(1)鱼(虾)探测装置。投饵船的探测装置由超声波传感器、数据处理控制软件模块等组成。投饵船在养殖池塘内按一定的速度和线路巡航时,当探测装置的超声波传感器在池塘中发现鱼(虾)群后,会将相应信息传送给数据处理控制模块部件,再由控制模块向投料装置发送是否抛料作业的指令。
(2)投料装置。它是执行饲料投放功能的设备,主要包括料仓、下料装置、抛料机构和配套电机。整个投饵设备安装在船体中偏后部位置,以避免料仓中饲料量减少引起投饲船重心位置变化,进而影响投饵船行驶的稳定性。当投料装置接收到开始投饵指令时,下料装置的控制阀门和抛料电机的开关同时开启,料仓中的饲料经下料器阀门口落到由电机带动的高速旋转的抛料盘中被甩出,投料的时机和时间长短由投饵船的饲料投喂控制系统决定。
2.3 控制系统
控制系统由软件模块、信号接收器、自动巡航控制器等电子器件组成。通过在控制系统各模块中预先设定相应的工作参数,实现投饵船的自动巡航和饲料投喂作业。
(1)自动巡航控制系统。自动巡航是指投饵船能按预先设定线路行驶,在行驶中能自动调整投饵船的航行路线和航向。系统开发时采用深圳市凌涵科技有限公司生产的Ublox-NEO-M8N GPS导航定位模块,并结合用计算机C语言开发的相应软件控制系统,实现投饵船作业时按预先设定路线的自动行驶和转向。另外,系统开发时还增加了手动遥控工作模式,该模式下使用人员通过操作睿斯凯企业生产的X7无线电遥控器,能够实现对推进器的启动和停止、投饵船的航向和航行速度等的控制。
(2)饲料投喂控制系统。饲料投喂控制系统的软件模块也采用计算机C语言开发,当鱼(虾)探测装置探测到鱼(虾)时,将此信息传送给饲料投喂系统的控制软件模块,然后同时开启投料系统中的下料装置阀门和抛料机构电机,投饵装置就开始抛料作业,在抛洒一定数量饲料后,投料系统的控制软件模块又会发送停止投饵作业的指令,投饵装置随之停止作业;然后船体继续行走,再重新探测鱼(虾)群决定投料的时机和地点。
2.4 电源管理系统
投饵船上需要用电的部件不仅多,而且各用电部件的电压也不相同;因而需要根据投饵船各用电设备的功率总消耗和工作电压,配置相应电源和装置以适应各用电设备的工作电压。
(1)供电电源选择。自动投饵船上所有用电设备需要电源支持。综合考虑船上所有设备的用电功耗,投饲船采用12组3.5~4.2 V的DC锂电池作为电源,经过串联后形成一个平均为48 V的DC总电源,进而分别为投饵船的行驶驱动装置、航向控制装置、鱼(虾)探测装置、投料装置等各个用电设备提供所需的相应电能。
(2)用电装置电压确定。根据投饵船系统各设备工况和功耗的要求,各用电设备工作电压参数如下:行驶系统中的螺旋桨推进器工作电压48 V,航向控制器的电机工作电压为24 V、模块工作电压为5 V;投喂系统中的下料装置控制阀门的电机工作电压5 V,抛料机构工作电压48 V;自动巡航控制系统中GPS工作电压为3.3 V,信号接收器的工作电压5 V。对上述各用电设备所需工作电压,则通过在总电源输出端加装一个电压调整模块装置来实现。
3 样机试验
根据上述研究技术思路,项目实施研制出的投饵船样机如图2所示。
3.1 试验条件和试验方法
(1)试验条件。水产养殖投饵船经过设计、制造和安装调试后,于 2017年10月至2018年2月近5个月的时间内,在金华市金东区万豪山庄的鱼塘进行了多次的投饵船样机试验和性能测试,池塘中的主要水产养殖品种为四大家鱼和鲫鱼。该鱼塘的形状呈不规则的长方形,水域面积大约4 hm2,平均水深约为2.0 m。试验鱼塘及周边环境的基本情况如图3所示。

图2 研制的投饵船样机

图3 投饵船样机试验现场图
(2)试验方法。试验前依靠人工养殖经验来设定投饵船的行走和投饲轨迹,并根据项目合同书中的技术性能指标要求,分别在手动遥控和自动巡航两种工作模式下,测试投饵船直线行驶、拐弯等动作的稳定性,以及船上投喂设备的稳定性和抛撒饲料的均匀性等性能。同时对在试验过程中发现的各种问题采取各种有效措施加以解决,直至投饵船样机的各项性能指标均达到项目合同书中的规定要求。在性能指标自测达到设计要求后,请浙江方圆检测集团股份有限公司对样机各项性能指标进行检测,以确保样机性能指标的权威性。
3.2 试验结果和分析讨论
(1)试验结果。从试验过程看,在手动遥控工作模式下,投饵船完全能够根据操作人员给出的指令实现自动起停,按照一定速度进行转向、直行等相关行驶动作,并在行驶过程中完成鱼(虾)群探测、饲料投喂等作业,同时投饵船行驶过程中具有良好的稳定性、直线性等性能;在自动巡航工作模式下,投饵船虽然能按预先设定的线路、拐点完成行驶、转向等相应动作,也能够在行驶过程中完成鱼(虾)群探测、饲料投喂等作业,然而在转向后需要直行时,投饵船的行驶路线时常会呈现“S”形轨迹,使投饵船的实际行驶路线与预先设定的线路发生部分偏离,从而在一定程度上影响了投饵作业效果。
(2)分析讨论。在自动巡航模式下进行投饵作业时,投饵船的行驶路线时常会呈现“S”形轨迹的原因主要有两个方面:一是所选船型对自动控制的适应性不够。试验时采用的船体是平底船,船体由于吃水浅,驱动时水中所受阻力较小,当横向方向稍微受到一点外力就容易发生偏转;若采用“V”形船体,船体吃水深,虽然行驶时水中所受阻力较大,但在横向方向所受外力不大时就不易发生偏转,从而能确保船体行驶的直线性。二是自动导航控制软件模块的算法有待完善。投饵船若要能按预先设定路线自动行驶,需要在行驶速度和所受扭力、阻力三者之间形成合理匹配,这需要控制系统的PID控制算法的支撑,但现有的增量式算法、位置式算法、微分先行算法三种PID控制算法并不能完全满足投饵船自动巡航过程中的控制要求,需要对控制系统中采用的PID控制算法进行完善。
4 结论与建议
(1)投饵船样机经浙江方圆检测集团股份有限公司现场实地检测,达到预定的各项性能指标要求(检测报告编号:1811300804)。该投饵船由于具有手动遥控和自动巡航两种操作模式,不仅能够适应鱼、虾等具有不同生活习性的水产品种的养殖投饵作业,而且还能大幅降低投饵作业劳动强度,提高饲料利用率,减少饲料对水体环境的污染,因而具有广阔的推广应用前景。
(2)虽然投饵船具有结构简单、制造方便、性能稳定等优点 ,但在自动巡航过程中的轨迹会出现“S”形路线,从而在一定程度上会影响饲料投放准确率。为此,研发人员下一步将对投饵船自动控制中的PID控制算法做进一步改进,同时采用“V”形船体替代试验中所用的平底船,实现投饵船在自动巡航过程中能实时调整和稳定船体航向,并避免出现“S”形行驶轨迹,由此确保投饵船在自动巡航时行走路线的直线性,进而提高饲料投放地点的准确性和有效性。
[1]浙江省统计局,国家统计局浙江调查总队.浙江统计年鉴[Z],2017.北京:中国统计出版社,2018.
[2]唐荣,邹海生,汤涛林,等.自动投饲船及其测控系统的设计与开发[J].渔业现代化,2013,40(6):30-35.
[3]陈晓龙,陈军,唐荣,等.对虾船载投饲机的研制[J].上海海洋大学学报,2015,24(1):152-160.
[4]孙月平,赵德安,洪剑青,等.河蟹养殖全覆盖自动均匀投饲的轨迹规划与试验[J].农业工程学报,2016,32(18):190-200.
