基于高频方波电压注入法的无传感器IPMSM研究
2018-04-26赵健平
赵健平,崔 巍
(上海大学,上海 200072)
0 引 言
由于内置式永磁同步电机(以下简称IPMSM)具有高功率密度、高转矩密度、高效率和快速响应性等突出优点,近年来已越来越广泛应用于传统的电机驱动应用领域和高性能的伺服驱动领域。IPMSM本质上属于同步电机,同步电机采用的磁场定向控制需要转子位置信息,所以IPMSM也不例外,而转子位置一般都是通过传统的机械传感器(光电编码器、磁编码器、旋转变压器等机械传感器)测得的,但机械传感器存在价格昂贵、安装困难以及应用场合有限等明显缺点,一定程度上限制了IPMSM的应用发展。
与机械传感器相比,无位置传感器技术很好地解决了上述问题,所以近30年来国内外的研究学者都将研究重点转向了无位置传感器技术。IPMSM无位置传感器控制技术的方法有多种,主要分为两大类:一是基于电机反电势的滑模观测器法、卡尔曼滤波法、锁相环法等,利用电压模型和观测器从反电势中提取转子位置信息,这类方法主要依赖电机的反电势,只适用于中高速阶段;二是基于电机凸极效应的高频信号注入法,通过向电机注入特定形式的高频信号(一般是注入正弦电压信号,注入频率大概在几百赫兹),再提取高频响应电流(这些高频响应电流就包含转子位置信息),将这些高频响应电流送入位置观测器进而得到电机转子的位置,这类方法在原理分析时就忽略很多低频分量,一旦转速高了,这些分量就不能忽略了,所以高频信号注入法只适用于零速和低速范围。
目前国内外学者研究较多的高频信号注入法主要有旋转高频电压注入法和脉振高频电压注入法,这2种方法可以划为传统的高频信号注入法,本质上都是利用电机的凸极效应估测转子位置信息,只是注入的形式不同。上述2种高频信号注入法在信号处理时都引入了滤波器,而滤波器的加入势必会导致估计出来的位置信号产生延迟,最后需要加以补偿,这些都增加了系统的控制难度。本文研究了一种基于高频方波电压注入的高频信号注入法,可以较好地解决以上问题。
1 IPMSM的数学模型
为了便于分析,本文将实际的IPMSM的理想化,忽略一些非线性因素的影响,得到的理想物理模型如图1所示。三相永磁同步电机的定子中有三相绕组(A相,B相,C相),彼此相差120°电角度,构成了ABC三相静止坐标系。构建α-β两相静止坐标系,其中α轴与A轴重合,β轴超前α轴90°(逆时针方向)。构建d-q两相同步旋转坐标系,其中d轴在转子磁极轴线上,q轴超前d轴90°(逆时针方向),该坐标系始终和转子保持同步。
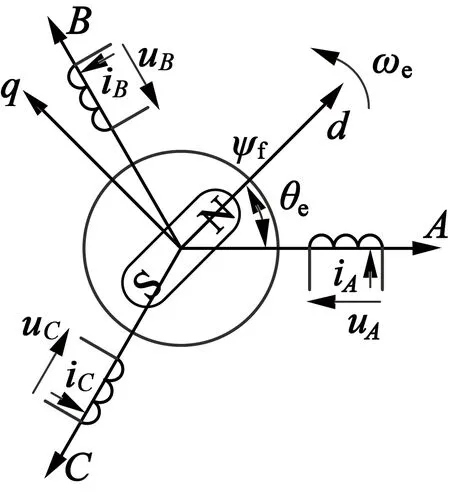
图1 IPMSM的理想物理模型
经过理论推导,得到IPMSM在两相同步旋转坐标系下的电压方程:
(1)
式中:ud,uq分别为定子电压d,q轴上的分量;id,iq分别为定子电流d,q轴上的分量;ψd,ψq分别为磁链d,q轴上的分量;ωe为转子电角速度;p为微分算子。
磁链方程:
(2)
电磁转矩方程:
(3)
机械运动方程:
(4)

2 基于高频方波电压注入法的IPMSM无位置传感器控制策略
永磁同步电机是一个非线性、强耦合的复杂控制系统,要想取得高性能的控制效果,控制策略的选择尤为重要,矢量控制就是其中应用较多的一种。目前根据应用场合的要求,矢量控制主要有:id=0控制、转矩电流比最大控制、单位功率因数控制和恒定磁链控制。其中id=0控制是这4种矢量控制策略中应用最多的,不仅具有控制简单、计算量小等突出优点,而且id=0控制不会产生去磁效应而使永磁体失效,可以有效保证电机控制系统长期稳定地工作。
高频方波电压注入的原理是估计d轴上注入正负交变的方波信号,通过检测相应的高频响应电流变化量来提取位置信号,其id=0的矢量控制系统框图如图2所示。
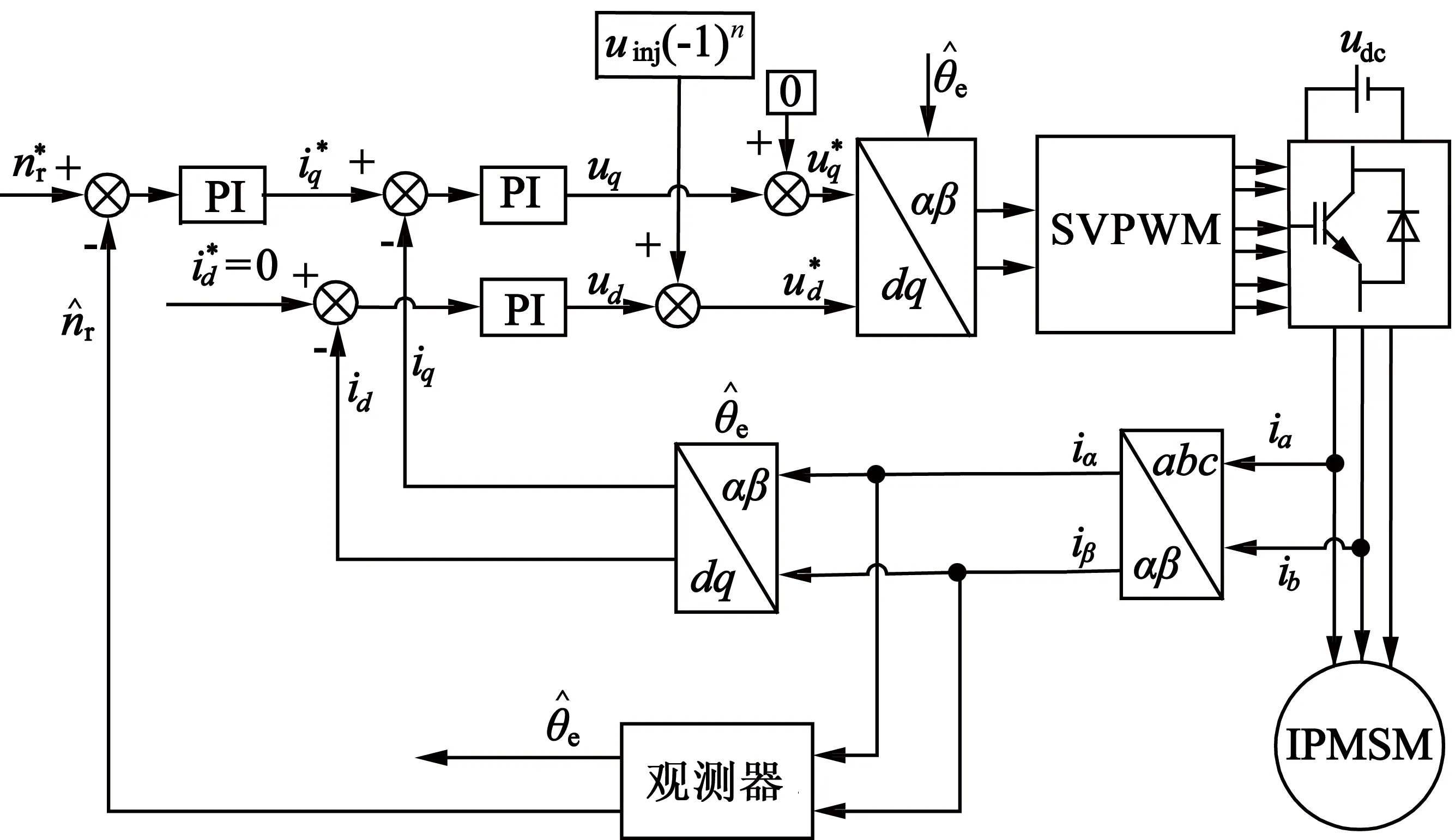
图2 高频方波电压注入法的
简单分析传统的高频信号注入法的工作原理,不难得出高频方波电压注入法的另一个突出特点:方波电压注入法的注入频率可达到开关频率,传统的正弦电压注入法只有几百赫兹。对于高频信号注入方法来说,注入的频率越高,无位置传感器的控制效果越好,但是频率增加会相应地增加电流采样的频率,增加软件复杂程度。本文只考虑注入频率等于一半开关频率的情况,其注入波形如图3所示。
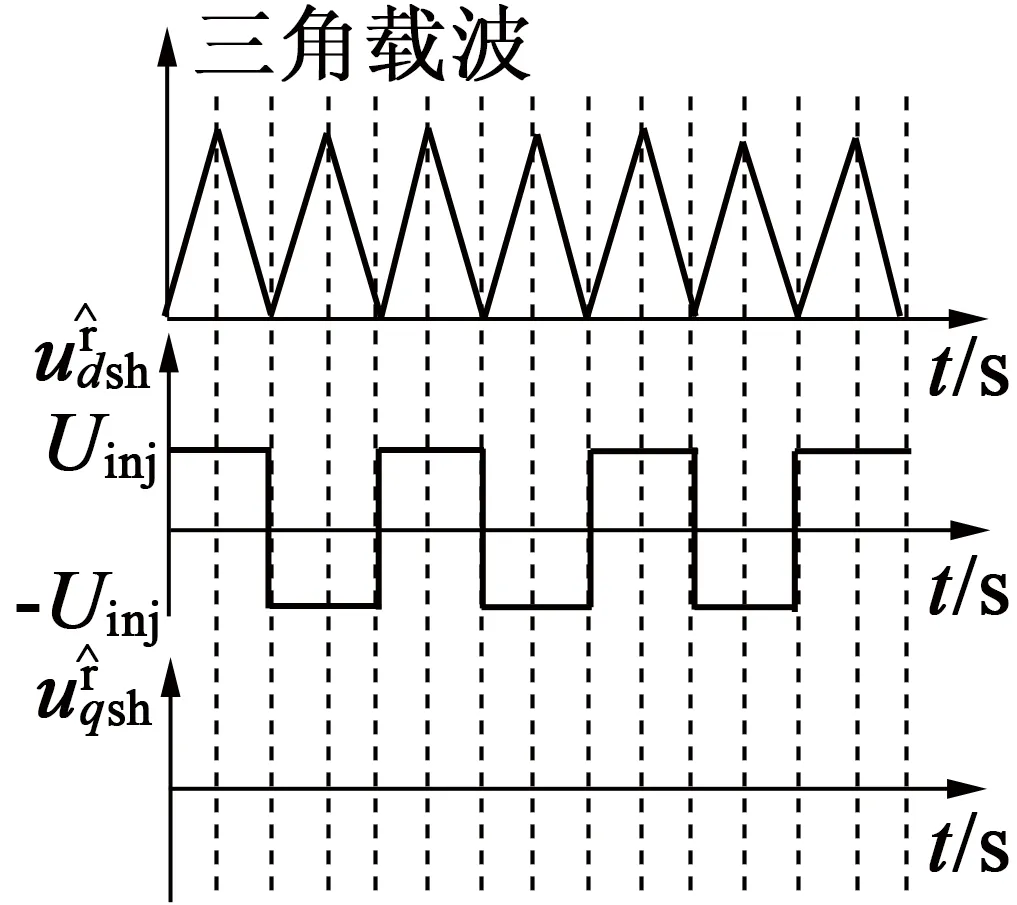
图3 PWM载波和注入电压波形
方波电压仅注入于估计同步参考坐标系的d轴,q轴不注入电压,注入的高频方波电压可以表示为:
(5)
由于方波电压是在估计的同步参考坐标系下注入的,这和实际的同步参考坐标系有点区别,需加以说明。先定义转子位置估计误差(均是指电角度):
(6)

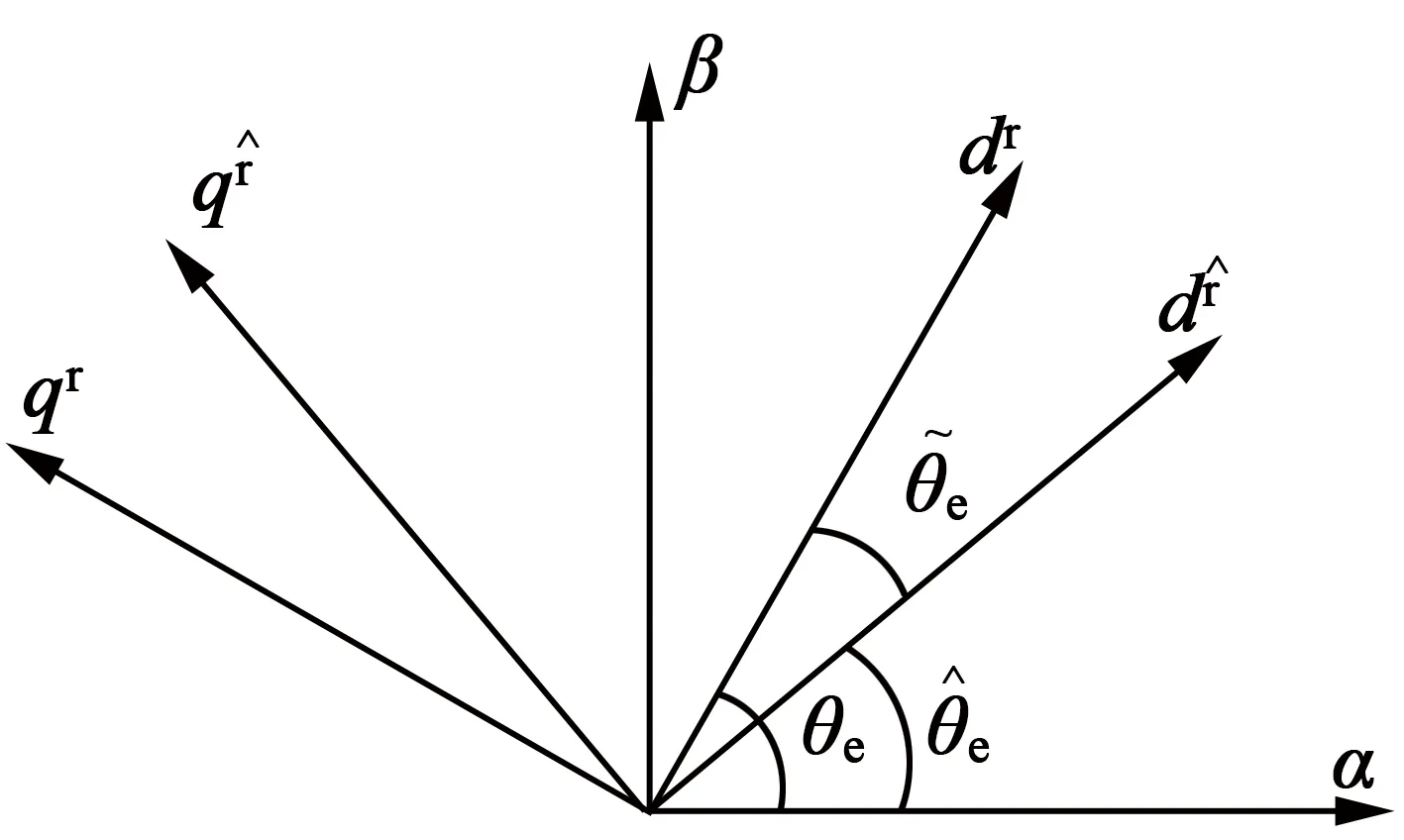
图4 各坐标系关系图
同步旋转参考坐标系下的电压方程如下:
(7)

(8)

(9)

(10)
真实同步参考坐标系下计算得到实际高频响应电流如下:

(11)
再经过变换得到静止参考坐标系下的高频响应电流如下:
(12)

(13)
最后可以得到下式:
(14)
(15)
注入幅值正负跳变的方波电压不仅增加了程序的难度,而且也增加了电机的铁耗。在能取得相同的估计位置信号的前提下,可以考虑注入电压形式。比如注入方波电压,但是幅值在一个方向变化;或者注入三角波。这些都需要严密的理论推导和实验结果,可以作为以后的研究方向。
3 仿真验证
根据以上分析,本文在MATLAB/Simulink中搭建了采用id=0的高频方波电压注入法的IPMSM无位置传感器控制系统仿真模型,仿真模型中IPMSM的参数如表1所示。

表1 IPMSM电机基本参数
在d轴上注入一半开关频率的高频方波电压,注入的电压幅值取15 V。仿真参数如下:给定转速n=100 r/min,仿真时间t=1 s,电机空载起动,在t=0.4 s时突加1 N·m的负载,得到三相电流波形如图5所示。
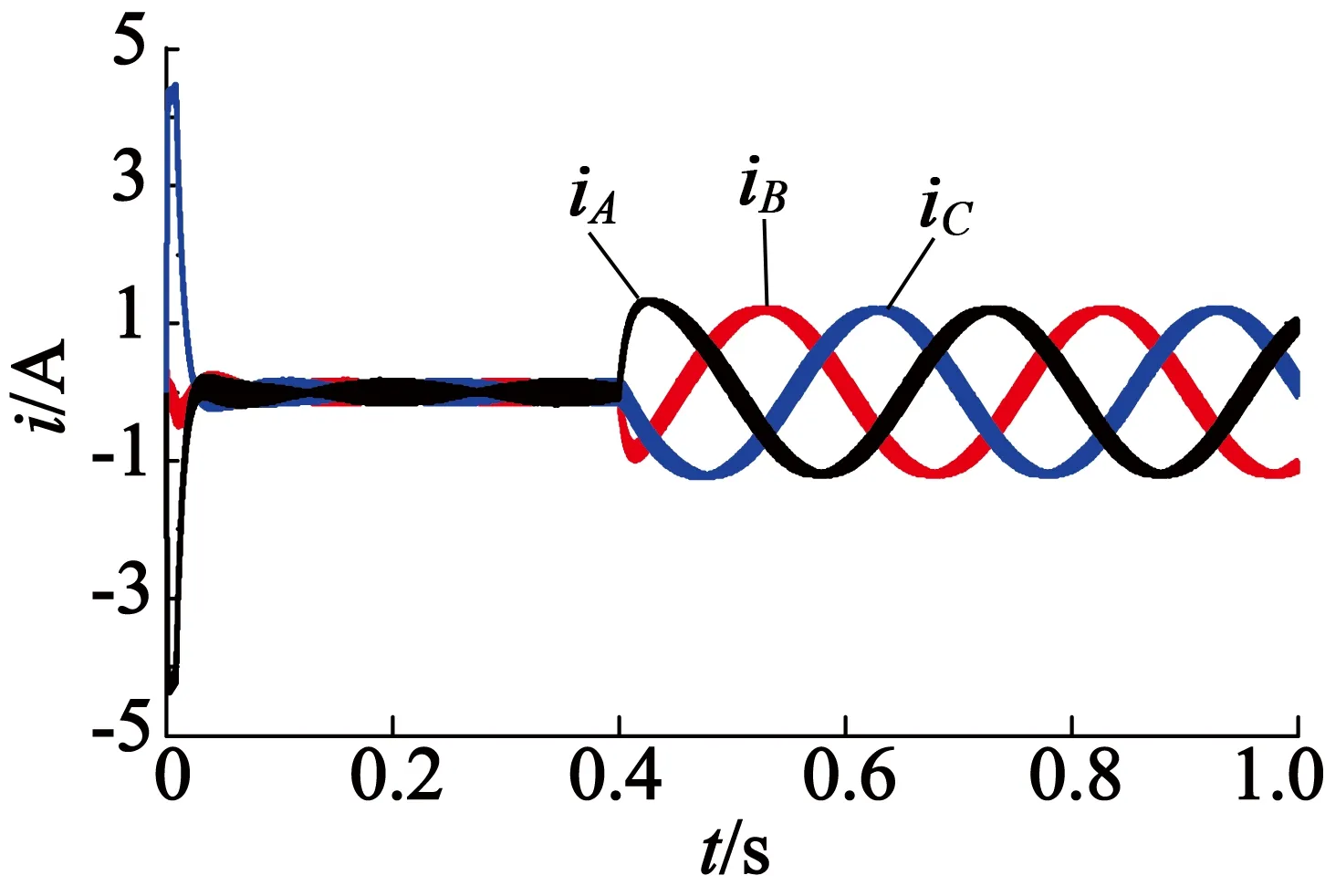
图5 注入高频方波电压后的三相电流波形
从图5可以看出,注入的高频方波电压产生了高频谐波电流使得三相电流波形明显变粗,但波形依然保持正弦,说明注入的高频方波电压并不会对原来的控制系统产生明显的负面影响。这些高频谐波电流信号就包含了我们想要获取的转子位置信号,根据上文的分析,设法采集静止参考坐标下的两相高频响应电流变化量信息,然后将采集到电流信号送入正交锁相环提取得到转子位置信息。
本文研究了一种提取静止参考坐标下高频响应电流变化量的方法,并将其应用于仿真模型中,提取到的高频响应电流变化量如图6所示。为了便于参数调节,仿真模型中将送入正交锁相环的高频响应电流增量做了归一化处理,所以图6的高频响应电流增量要比实际值大。
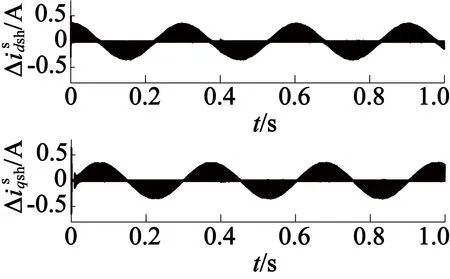
图6 静止参考坐标下高频响应电流变化量波形
从图6可以验证提取到的信号与式(15)相对应,提取方法正确。将提取得到的高频响应电流变化量送入正交锁相环得到位置信号(本文提及的位置信号都是指电角度)如图7所示。

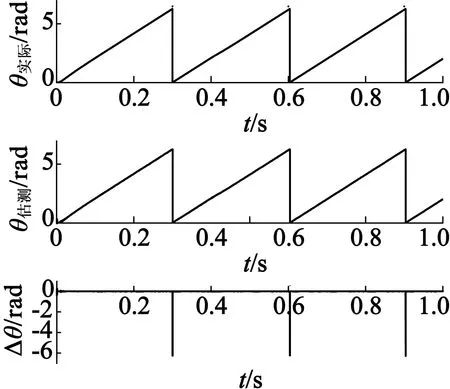
图7 位置信号波形
4 实验验证
通过仿真验证了理论的正确性,为了保证研究的完整性,还需要验证本方法实际的实验效果。因此搭建了实验平台,实验平台包括:一台IPMSM(电机参数与仿真模型中一致)、电源箱、以TMS320F2812DSP为核心的控制板,带有IPM的驱动板,实验平台如图8所示。

图8 系统实验平台
先做未注入高频方波电压的实验,电机在带载情况下得到A相电流的波形,如图9所示。

图9 未注入高频方波电压的A相电流波形
负载不变,注入高频方波电压以后,可以得到A相电流波形,如图10所示。

图10 注入高频方波电压的A相电流波形
对比图9和图10可以得到,注入的高频方波电压会在原来的电流波形上增加高频谐波电流,并与仿真波形取得一致。
而后采集静止参考坐标下的两相高频响应电流变化量,由于这个变化量很小,示波器不方便观测,特意将其放大10倍,得到的电流变化量波形如图11所示。

图11 静止参考坐标下的高频响应电流变化量波形
从图11中看出,2个高频响应电流变化量都是正弦信号,相差90°电角度,也验证了前面理论分析地正确性。将图11中的电流送入正交锁相环,可以得到估测位置信号,如图12所示,图12从上到下分别是实际位置信号和估测位置信号。

图12 位置信号波形
将图12中的实际位置信号和估测位置信号作差可以看出,估测位置信号和实际位置信号最大相差10°电角度,从而通过实验更好地验证了该方法的正确性。本文没有采用任何形式的滤波器,使得位置信号不存在较大延迟。由于实际硬件自身存在的误差以及开关管死区时间的影响,实验得到的位置信号值会比仿真值大,但实验得到的结果还在接受范围内。
以上实验是在带光电编码器运行的前提下,通过在d轴上注入高频方波电压,进而观测一系列变量信息。该理论的最终目的是要实现IPMSM的无位置传感器(即光电编码器)的运行,所以最后进行无位置传感器的运行实验。
下面进行无位置传感器双闭环运行的实验,电机空载起动并稳定运行一段时间,得到转速波形如图13所示,图13从上至下分别为观测器估计速度和光电编码器测得的速度。从图13可以看出,电机转速偏差在±7 r/min,由于观测器估测出来的位置信号和真实位置信号存在误差,使得估测得到的速度信号也存在抖动,这是不可避免的。空载电流波形如图14所示。过段时间加载电流波形如图15所示。从空载到负载突变,电机电流为正弦,证明电机无位置传感器运行下具有良好的动态性和稳定性。
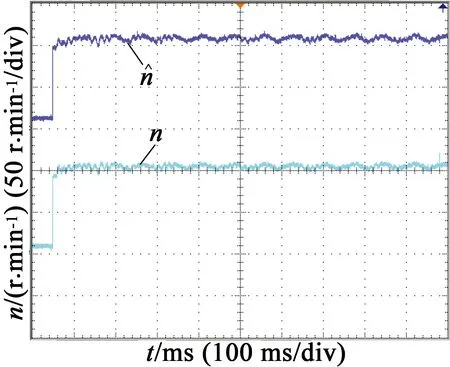
图13 无位置传感器运行速度波形
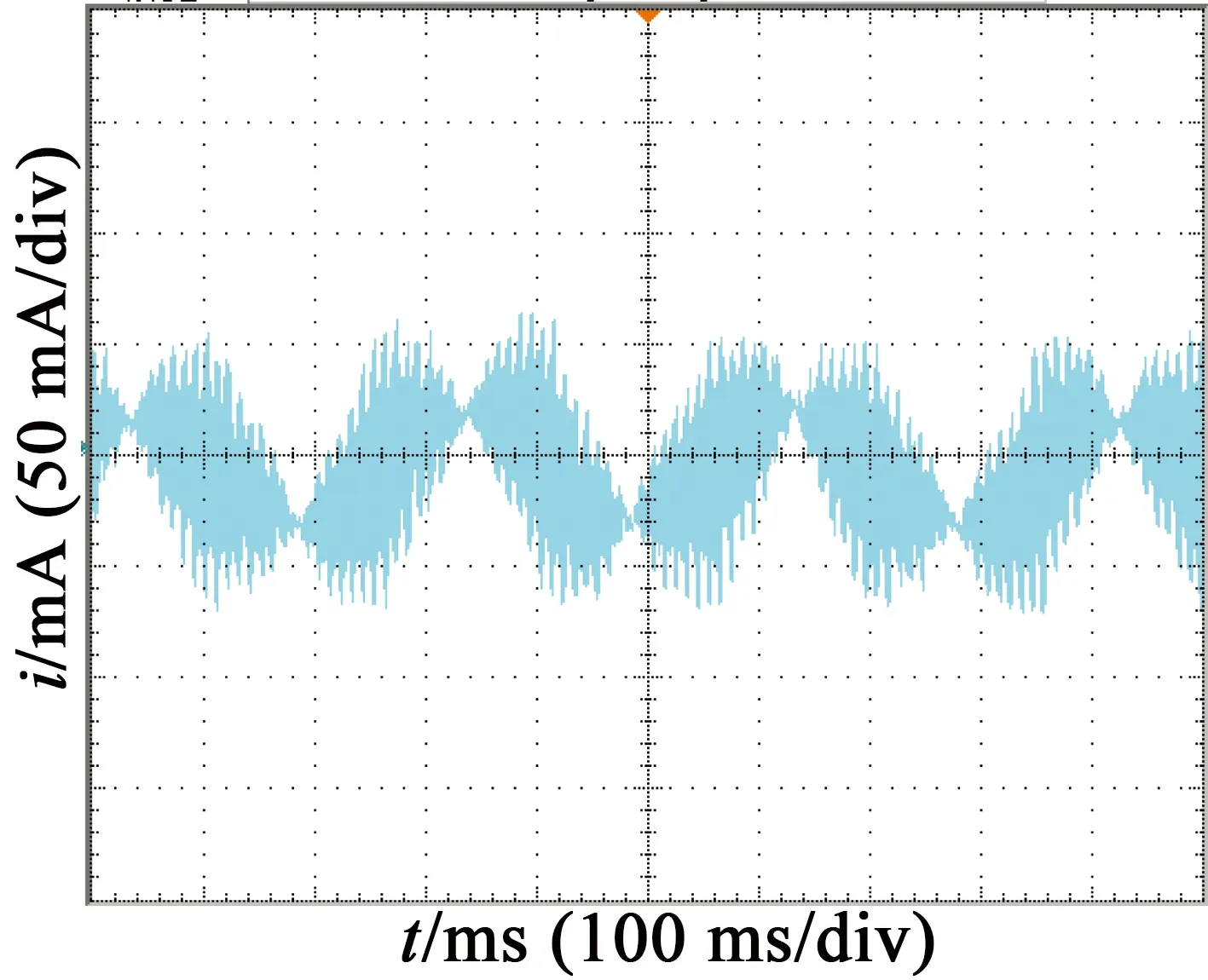
图14 无位置传感器运行空载电流波形
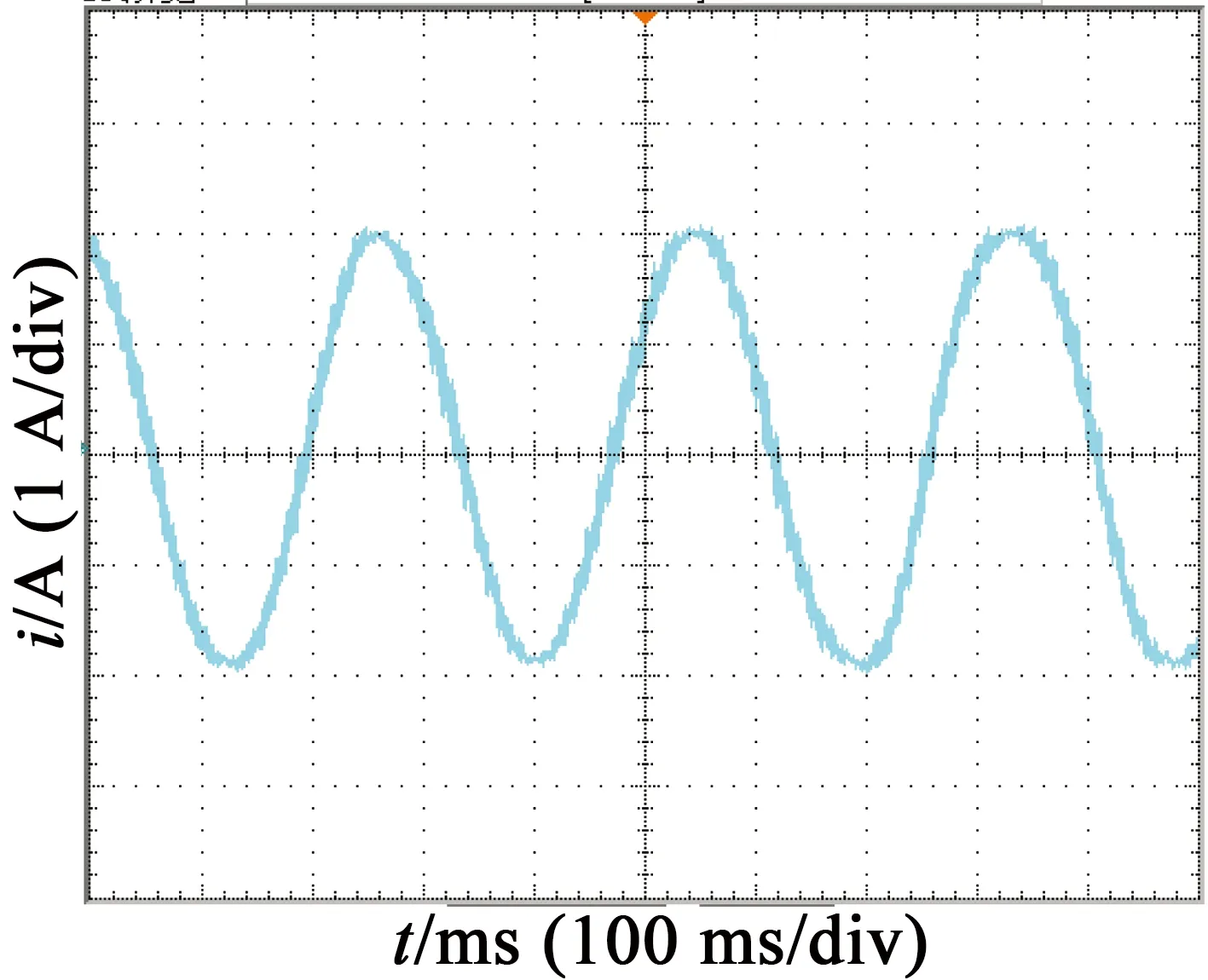
图15 无位置传感器运行带载电流波形
5 结 语
本文首先分析了IPMSM的数学模型,而后研究了一种新的无位置传感器方法——高频方波电压注入法,并对其理论做了详细推导。接下来分别进行了仿真验证和实验验证,通过仿真和实验结果对比,验证了分析的正确性,表明了本文的方法的正确性和有效性,对无位置传感器的研究和实际应用具有一定参考意义。
本文最后进行了无位置传感器的双闭环运行实验,更加验证了理论的可靠性,但不足之处是无位置传感器双闭环运行时电机转速存在稳态误差。接下来的工作将继续优化算法,消除稳态误差。
本文的实验并没有将注入的频率做到开关频率,是本文的另一个不足之处。今后的研究将注入频率提高到开关频率,甚至是几倍的开关频率,通过实验对比各种注入频率的实际效果,找到转速带宽更宽、位置估计误差更小的注入频率。
[1] KIM H,LORENZ R D.Carrier signal injection based sensorless control methods for IPM synchronous machine drives[C]//IEEE IAS Annual Meeting,2004:977-984.
[2] BOLOGNANI S,CALLIGARO S,PETRELLA R,et al.Sensorless control of IPM motors in the low-speed range and at standstill by HF injection and DFT processing[J].IEEE Transactions on Industry Applications,2011,47(1):96-104.
[3] YOON Y D,SUL S K, MORIMOTO S,et al.High-bandwidth sensorless algorithm for ac machines based on square-wave-type voltage injection[J].IEEE Transactions on Industry Applications,2011,47(3):1361-1370.
[4] GUERRERO J M,LEETMAA M,BRIZ F,et al.Inverter nonlinearityeffectsinhigh-frequencysignal-injection-basedsensorless
controlmethods[J].IEEETransactionsonIndustryApplications,2005,41(2):618-626.
[5]LINTC,GONGLM,LIUJM,etal.Investigationofsaliencyinaswitched-fluxpermanent-magnetmachineusinghigh-frequencysignalinjection[J].IEEETransactionsonIndustrialElectronics,2014,61(9):5094-5104.
[6]ODHANOSA,GIANGRANDEP,BOJOIRI,etal.Self-commissioningofinteriorpermanent-magnetsynchronousmotordriveswithhigh-frequencycurrentinjection[J].IEEETransactionsonIndustrialElectronics,2014,50(5):3295-3303.
[7]RACAD,GARCIAP,REIGOSADD,etal.Carrier-signalselectionforsensorlesscontrolofpmsynchronousmachinesatzeroandverylowspeeds[J].IEEETransactionsonIndustryApplications,2010,46(1):167-178.
[8]KIMSungmin,HAJung-IK,SULSeung-Ki.PWMswitchingfrequencysignalinjectionsensorlessmethodinIPMSM[J].IEEETransactionsonIndustryApplications,2012,8(5):1576-1587.
[9] 王高林,杨荣峰,李刚,等.基于高频信号注入的IPMSM无位置传感器控制策略[J].中国电机工程学报,2012,27(11):62-68.