基于PLC的气动机械手模拟控制系统设计
2018-04-26郭志冬
郭志冬
(三门峡职业技术学院, 河南 三门峡 472000)
气动机械手利用气压传动实现机械动作。气压传动工作压力低,运动简单,价格低廉、抗干扰能力强,适用于各类生产环境,应用范围相对较广[1]。机械手是较早出现的代替人的劳动以实现自动化生产的机械设备,尤其在有毒和放射性等恶劣环境下,代替人的劳动保护人身安全有着重大的意义[2]。因此,机械手在自动化生产过程中受到极大的重视,被广泛应用与各个行业。机械手可以模拟你的手和臂的动作机能,在生产过程中依据一定的顺序实现抓取、升降、搬运等工作任务,是一种简化的工业机器人[3]。气动机械手可以通过PLC编程来实现各种各样的控制要求。
一、气动机械手动作模拟过程
气动机械手的模拟过程如图1所示。气动机械手将工件从A电搬运到B点。

图1 气动机械手的模拟过程
控制过程如下:将工件由A处传送到B处,上升/下降和左移/右移的执行用双线圈二位电磁阀推动气缸完成。当某个电磁阀线圈通电,就一直保持现有的机械动作,例如一旦下降的电磁阀线圈通电,机械手下降,即使线圈再断电,仍保持现有的下降动作状态,直到相反方向的线圈通电为止。另外,夹紧/放松由单线圈二位电磁阀推动气缸完成,线圈通电执行夹紧动作,线圈断电时执行放松动作。设备装有上、下限位和左、右限位开关,它的工作过程如图所示,有八个动作,即为:原位、下降、加紧、上升、右移、下降、放松、上升、左移、原位。
二、气动机械手动作实现过程分析
本文选用的PLC型号为FX3G-40M,系统为16输入/24输出。 气动机械手的初始状态:SQ2、SQ4闭合,SD、SQ1、SQ3断开。机械手动作的实现过程如下:
(1)闭合“启动”开关SD,Y0输出,机械手下降。手动断开上限位开关SQ2。
(2)闭合下限位开关SQ1,表示机械手下降到位。Y0断开停止下降,Y1输出夹持工件,经一段时间延时,Y2输出,机械手上升。手动断开下限位SQ1。
(3)闭合上限位SQ2,Y2断开,停止上升,同时Y3输出,机械手右移。手动断开左限位开关SQ4。
(4)闭合右限位开关SQ3,表示机械手已经移到最右边。Y3断开输出,机械手停止右移,同时Y0输出,机械手下降。手动断开上限位SQ2。
(5)闭合下限位SQ1,Y0断开,停止下降,同时Y1断开,放开工件。经一段延时,Y2输出,机械手上升。手动断开下限位SQ1。
(6)闭合上限位SQ2,Y2断开输出,停止上升,同时Y4输出,机械手左移。断开右限位SQ3。
(7)闭合左限位SQ4,若“启动”开关闭合,进行下一个工作循环;“若启动”开关断开,原位指示灯亮,机械手停在原位。
三、气动机械手控制系统设计
控制系统是机械手设计的重要组成部分,是保证机械手在工作过程中安全可靠的关键。控制系统的稳定性和可靠性的直接决定了机械手工作过程的效率,起着不可低估作用[4]。
(1)气动机械手的I/O分配表如表1所示。

表1 气动机械手的I/O分配表
(2)气动机械手的电路设计
气动机械手的接线图设计如图2所示。

图2 气动机械手的接线图
(3)程序设计
鉴于气动机械手的动作特点及PLC的程序特点,程序设计采用顺序功能图编程,提升编程的效率,从而保证气动机械手运行的运行效率,真正发挥气动机械手PLC电路程序设计的价值[5]。气动机械手的顺序功能图程序如图3所示。
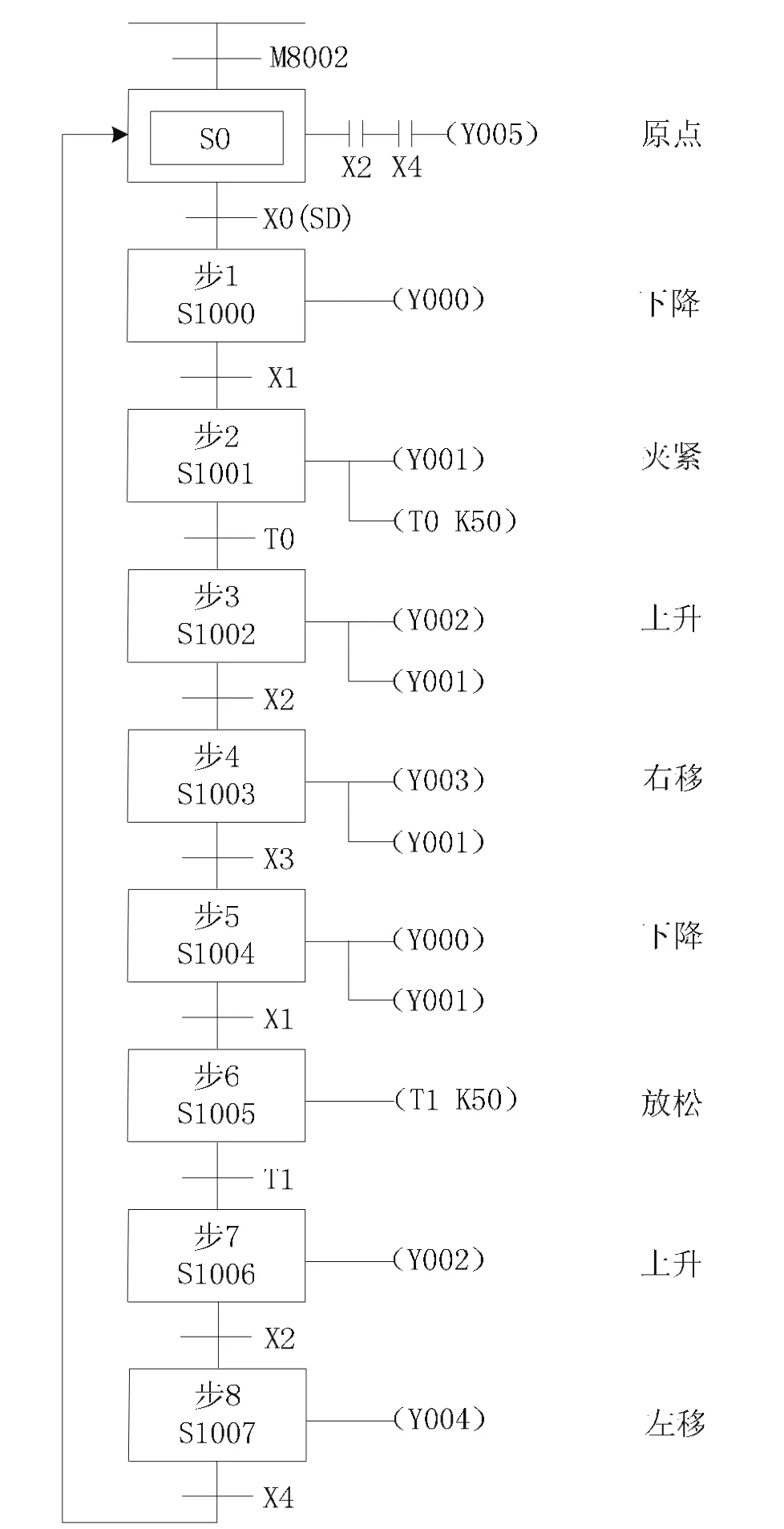
图3 气动机械手的顺序功能图程序
四、系统调试
根据图2气动机械手的接线图连接好硬件系统。根据图3气动机械手的顺序功能图程序在编程软件GX developer中编写出顺序功能图程序,然后将程序下载到PLC FX3G-40M中去。将电路通电,然后进行调试。打开开关,运行程序,实验结果表明,气动机械手工作过程严格按照原位、下降、加紧、上升、右移、下降、放松、上升、左移、回原位的逻辑顺序执行,并不断的重复动作。
五、结语
设计了气动机械手的控制系统。控制过程给出了八个动作过程即原位、下降、加紧、上升、右移、下降、放松、上升、左移回原位。控制系统采用PLC作为控制器,编程采用顺序功能图,编程思路清晰,编程过程简单,动作实现可靠。该气动机械手能够满足简单的自动化搬运过程,具有结构简单,编程容易,价格低廉,操作方便等优点,有着广泛的应用场合。
以此气动机械手为基础,后期可以增加组态控制、传感器位置精度检测等环节,丰富和完善现有的控制过程和系统,可以扩展其应用场合,具有很好的推广价值。
参考文献:
[1]谢 靖,谷 敏.气动机械手PLC电路的设计浅析[J].电子测试,2017,4):28-29.
[2]何惠湘.基于PLC的机械手控制项目教学研究[J].无线互联科技 2017,(11)(22):92-92.
[3]曹京生,夏长凤.现代电气控制技术[M].北京:冶金工业出版社,2011.
[4]王建国,王江江,等.基于PLC的机械手设计[J].中国新技术新产品 2017,(3):15-16.
[5]谢 靖,谷 敏.气动机械手PLC电路的设计浅析[J].电子测试,2017,(4):28-29.
