载人运载火箭姿态故障检测门限研究
2018-04-26邓舞燕
邓舞燕,王 楠,张 智
(1.北京宇航系统工程研究所,北京100076;2.中国运载火箭技术研究院,北京100076)
1 引言
载人航天工程对航天员安全极为重视,所用载人运载火箭(下文简称火箭)须增加专用的故障检测处理系统(下文简称故检系统)和逃逸系统来满足航天员的安全性要求[1]。
故检系统在火箭飞行过程中一直检测火箭的飞行状态,判断火箭是否出现需要逃逸的故障,并在确认火箭故障后自动发出逃逸信号,保证宇航员人身安全[2]。在其检测的飞行状态信号中,有一类信号能够反映火箭飞行姿态,包括姿态角信号和姿态角速率信号[2]。本文将火箭的各组成部分发生故障后导致火箭飞行姿态信号异常的各种故障模式总和定义为火箭姿态故障。故检系统通过检测这些与火箭飞行姿态有关的信号,并与给定的故障检测门限进行比较,来判断火箭是否出现了与姿态相关的故障[3]。姿态故障门限对于是否能够及时地诊断出故障,以及不将正常飞行的火箭误诊断为故障十分重要,故障门限值设计是否合理直接影响到宇航员的人身安全。
美国早期土星ⅠB、土星V火箭均采用了三轴角速率信号作为自动检测姿态故障的参数,并且在飞行过程中故障门限值保持不变,如土星V的俯仰、偏航角速率门限为±4°/s,滚动角速率门限为 ±20°/s[4]。 航天飞机将单台主发动机故障作为自动应急返回的依据,对于其它所有的故障,均由航天员在地面辅助下手动执行[5]。
火箭是一个复杂的动态系统,由于其系统组成的复杂性,系统状态随飞行时间变化的动态性,箭上故障检测的实时性以及箭上设备对故障信息的处理能力有限,选择少量的、能反映故障最终结果的参数作为故障检测参数是必然的结果。但整个飞行过程仅用单参数且固定不变的门限势必导致漏判或误判的概率增加。另外,火箭的设计一般都要求有一定的裕度,一定的故障吸收能力,在某些轻度故障情况下,仍可以继续工作,甚至完成预定任务。因此,门限的制定必须考虑故障的适应能力。
本文将蒙特卡洛仿真方法引入姿控故障门限设计,以正常飞行状态的随机打靶仿真和故障飞行状态仿真为手段对姿态故障参数门限的制定和修正方法进行研究,以得到分区的、时变的故障门限;通过多次逐步循环修订,来提高姿控门限设计的准确性,降低误判或漏判的概率,提高航天员的安全性。
2 门限设计流程
本项研究中需要确定的姿态故障检测门限有三个,即:姿态角偏差门限、角速度积分门限和一致性门限,其设计流程见图1。该流程采用多次逐步循环修订的方法使故障门限更合理。非载人火箭也可根据此流程清晰地得到安全自毁门限。
3 门限设计方法
3.1 姿态角偏差故障门限
姿态角偏差故障门限制定过程中使用火箭正常飞行和故障飞行数学仿真系统。该系统根据研制工作需要,在 Matlab/simulink平台上自研,其制定方法如下:
1)在数学仿真中采用刚体模型,不考虑推进剂晃动和箭体弹性变形,在最终统计结果中增加模型误差,此模型误差一般取β(量纲:°)。

图1 姿态故障门限设计流程图Fig.1 Design flow chart of attitude threshold
2)进行多次火箭正常飞行状态仿真,数学仿真中,使初始姿态、各种干扰、动力学运动方程式系数在偏差范围内按3σ正态分布随机生成。
3)对仿真结果中的姿态角偏差进行统计分析,获得其分布特征量,见图2。一般为正态分布,设其方差为σ,可初步设定其门限为nσ;考虑模型误差和实际检测时的测量误差后,则姿态角偏差的初步门限为nσ+β。
4)线性包络修订。用一段或多段连续的直线去替代统计得到的姿态故障门限,使统计得到的姿态故障门限均在此直线包含范围内。

图2 俯仰姿态角偏差3σ统计结果Fig.2 Statistical results of pitch deviation by 3σ
5)特殊时间点修订。逃逸塔分离、助推器分离、级间分离、整流罩分离等火箭分离动作前后时段内的姿态角偏差故障门限应适当考虑余量,以适应某些故障情况,防止误判。
6)故障飞行数学仿真试验结果修订。在特殊时间点修订完成后,还应根据火箭故障飞行仿真结果和控制系统能力局部修订故障门限。用数学方法模拟火箭故障进行故障仿真,同正常状态数学仿真一样采用蒙特卡洛法,但应注入故障模式。故障模式一般选取伺服机构小角度卡死故障[6]、速率陀螺输出故障[7]、发动机推力下降故障等。
7)最后通过火箭半实物仿真[8]果和飞行试验结果对门限进行检验。
3.2 姿态角速度积分门限设计
积分时间过长就相当于全过程积分,太短则与使用角速度效果相同。为了确定一个合适的积分时间长度,须对各种能够导致姿态失稳故障模式进行研究。
火箭正常飞行过程中出现一个干扰时,在不考虑陀螺零漂(或者陀螺零漂很小)的情况下,只要积分时间长度大于这个干扰存在的时间,积分时间长度的变化将不再影响积分结果。从长征二号F Y1、Y2、Y3火箭实际飞行结果来看,级间分离影响最大,干扰存在时间分别为2.44 s、2.19 s和2.17 s,影响时间基本相同。
火箭出现故障时,其姿态的变化有一个过程,针对某火箭和给定的故障模式集合,仅存在振荡收敛和单调发散两种方式。只要积分时间长度与故障发展的周期相一致,积分就能真实反映这个过程。对伺服机构卡死故障和控制系统开环故障的研究表明,火箭姿态角偏差超过10°需要的时间在3.5 s~6.4 s范围内。按照效果与姿态角偏差相同的目标,积分时间长度应为3.0~6.5 s。
在没有实际飞行数据时,可采用同姿态角偏差故障门限设计流程相同的方法来得到速率陀螺角速度积分故障门限。在有多次实际飞行数据时,将实际飞行数据加入统计子样进行概率统计。
3.3 一致性门限设计
以俯仰角为例,角速度在t0~tn时间段内积分运算如式(1):

式(1)代表一段时间内姿态角在箭体坐标系内的变化量,在小角度(不大于10°)情况它可以近似等同于惯性坐标系下该段时间内俯仰角的变化量[3],即式(2):

由于某一时刻的俯仰角为此刻的姿态角偏差与程序角的和,即式(3):

代式(3)入式(2)可得式(4):

若在给定的时间段内,程序角的变化可以忽略,则这个积分增量可以代表控制系统输出的姿态角偏差变化量。而给定的程序角在积分时间内的变化量与给定时间段的长短有关。
对三次实际飞行中俯仰程序角的T秒变化量进行分析,见图3,结果表明:即使在积分时间长度为3 s的情况下,程序角的变化也不能忽略。
姿态角偏差来自于火箭惯组测量的解算结果,解算过程中对惯组中不同陀螺的信号进行了平均处理,而箭体角速度信号来自箭体速率陀螺,其信号经过了遥测系统的变换处理。来源不同,精度不同、处理方式不同,再加上小角度的假设,这两个量之间存在着差异。那么一定存在一个量δ,使得正常飞行时,若 Δφω- (Δ-) < δ,称这两个量是一致的,δ即为一致性门限。
δ的大小可用精度分析的方法获得,也可以用飞行数据和半实物仿真获得。本文主要使用精度分析方法,即对各物理量产生的各个环节的引入误差对最终结果精度影响进行评价:

图3 实际飞行俯仰程序角的3 s变化量Fig.3 Variation of pitch program angle in 3 sec of actual flight
姿态角偏差一般通过惯性平台或捷联惯组测量获得,其3σ偏差表示为δp。角速率信号一般由箭体速率陀螺测量获得,其3σ偏差表示为δω。该信号需要测量系统的一个设备进行信号转换,其转换精度为δv。故捡系统通过模数转换采集这个信号,并进行积分处理。与其他环节相比,数模转换的精度很高,在精度分析中可以忽略。在积分环节,由于存在小角度假设,因此存在方法误差,其3σ偏差表示为δj。
精度的综合可采用代数和的方法,也可采用均方和的方法。考虑到代数和方法获得结果代表最恶劣的极限偏差,均方和方法获得的结果代表与单项偏差概率相同的综合偏差,本文选用均方和方法,计算如式(5):

一致性门限难以通过数学仿真进行检验,但可以通过飞行数据进行检验。
4 门限合理性的仿真验证
火箭的故障模式千差万别,动力、箭体结构、分离等系统的故障模式几乎无法用实物或半实物进行模拟,必须通过火箭故障的数学仿真系统进行模拟。控制系统的部分模式则根据条件进行半实物的故障仿真。
4.1 火箭故障飞行仿真检验
通过故障模式的研究可知,与飞行姿态相关的故障共有四类,即:
1)单台发动机未启动故障;
2)单台发动机推力下降故障;
3)单台伺服机构卡死故障;
4)控制系统开环故障。
在火箭故障飞行仿真中,主要用这四类故障模式进行门限合理性的检验。
通过故障飞行仿真,可知第一类故障发生到火箭失稳的过程很长,且在失稳前的姿态角偏差不会造成结构破坏,火箭姿态失稳时,可以判出此类故障,见图4。

图4 单台发动机未启动故障的飞行姿态角偏差与正常飞行比较Fig.4 Comparison of flight attitude angle deviation between one engine without starting fault state and normal state
对于第二类故障,由于火箭二级飞行的控制力矩全部来自二级游动发动机,因此,游机未启动和推力丧失故障会造成火箭单调失稳,必然超故障门限。
对于第三类故障,飞行中一个伺服机构卡死故障,只要芯一级或二级有1台伺服机构卡死在最大角度,火箭姿态迅速单调发散,并超过故障门限。但如果卡死在某个小角度时,火箭有可能能够稳定飞行,且姿态角偏差不会超出门限,见图5。
对于第四类故障,控制系统开环将直接导致火箭快速单调失稳,并超出故障门限。
火箭故障飞行仿真结果验证了姿态故障门限设计的合理性。
4.2 控制-故检半实物仿真检验
控制-故检半实物仿真试验主要检验故障判据、门限以及故检软件实现对控制系统本身故障的适应性[8]。根据控制系统的故障模式,进行了速率陀螺故障、惯组故障、伺服机构故障和掉电通信类其他故障共四类故障模式的半实物仿真检验。由于掉电类故障模式与姿态门限值的设计无关,伺服机构故障模式与数学仿真检验结果基本一致,因此本文仅介绍速率陀螺故障和惯组故障的检验结果。仿真结果表明:

图5 一级伺服机构卡死在某小角度的姿态角偏差与门限比较Fig.5 Comparison of attitude angle deviation between small angle jammed for first stage servo mechanism and threshold
1)速率陀螺输出饱和故障对姿态角偏差和速率陀螺T秒积分值无明显影响,说明控制系统的能够对故障有效吸收。
2)一个速率陀螺固定大值输出但未超过切除门限时,发现故障检测系统均判断出逃逸,而此时火箭姿态均能在短时间内恢复稳定,见图6。因此,需将姿态角偏差门限修正到该故障模式引起的姿态角偏差之上,修正量为正常仿真结果与该故障仿真结果之差。

图6 速率陀螺固定值输出故障仿真结果Fig.6 Simulation result of fixed value output fault in rate gyroscope
3)惯组某一轴陀螺饱和及输出为零的故障对姿态角偏差和速率陀螺积分值没有明显影响,说明惯组冗余管理[9]能够进行有效工作,对故障门限无明显影响。
4.3 飞行数据检验
通过飞行结果分析,姿态角偏差、一致性、角速度积分增量数据正常,均在设定的报警限和故障限之内,见图7~图9。箭上未出现报警和故障信号,判据逻辑正确、参数门限合理,故检软件实现正确。

图7 实际飞行俯仰角偏差同门限值比较Fig.7 Comparison of pitch attitude angle deviation between actual flight and threshold
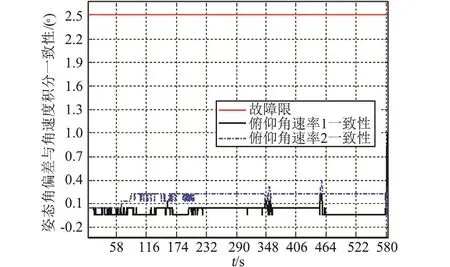
图8 实际飞行姿态角偏差与角速度积分一致性同门限值比较Fig.8 Comparison of the consistency between attitude angle deviation and attitude angular velocity integral in actual flight and threshold
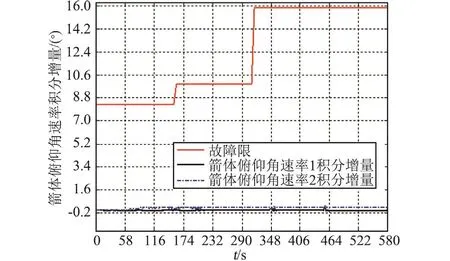
图9 实际飞行角速度积分增量与门限值比较Fig.9 Comparison of the increment of attitude angular velocity integral between actual flight and threshold
5 结论
1)将蒙特卡罗仿真方法引入姿态故障门限设计中,可以为姿态故障门限初步设计提供更多的数据子样,有利于进行统计分析;
2)利用故障飞行仿真结果和半实物仿真试验结构修正初步姿态故障检测门限,可以减少误判的概率;
3)火箭实际飞行结果表明本文所提方法合理有效。
参考文献(References)
[1] 刘竹生,张智.CZ-2F载人运载火箭[J].导弹与航天运载技术, 2004(1):6-12.Liu Zhusheng,Zhang zhi.LM-2F manned launch vehicle[J].Missiles and Space Vehicles, 2004(1):6-12.(in Chinese)
[2] 荆木春.载人运载火箭故障检测技术的成功应用[J].载人航天,2003,9(4):38-42+26.Jing Muchun.Successful application of fault detection technology for manned launch vehicle[J].Manned Spaceflight,2003, 9(4): 38-42 +26.(in Chinese)
[3] 刘烽.载人运载火箭故障检测处理系统设计方法[J].载人航天,2005,11(2):27-29 Liu Feng.The fault detection system design method for manned launch vehicle[J].Manned Spaceflight, 2005, 11(2):27-29.(in Chinese)
[4] 《世界航天运载器大全》编委会.世界航天运载器大全[M].第二版.北京:宇航出版社:737.Editorial Committee of World Space Vehicle.World Space Vehicle[M] Second Edition.Beijing: Aerospace Systems Press:737.
[5] Henderson E M,Nguyen T X.Space shuttle abort evolution[R].AIAA 2011-1072113,2011.
[6] 张亮,傅俊勇,刘洪宇.伺服机构反馈故障仿真与分析[J]. 液压与气动,2014(5):122-125.ZHANG Liang, Fu Junyong, Liu Hongyu.Simulation and analysis of servomechanism with feedback failure[J] Hydraulic and Pneumatic, 2014(5): 122-125.(in Chinese)
[7] 张斌,周来俭,赵秋年.运载火箭速率陀螺故障分析与仿真[J]. 微计算机信息,2011(10):46-47.ZhangBin, Zhou Laijian, Zhao Qiunian.Launch vehicle rate gyro fault mode fault simulation[J].Microcomputer Information, 2011(10): 46-47.(in Chinese)
[8] 颜国清.载人运载火箭姿态控制故障仿真研究[J].载人航天,2005,11(3):28-31.YAN Guoqing.Research on attitude control fault simulation of manned launch vehicle[J].Manned Spaceflight,, 2005, 11(3): 28-31.(in Chinese)
[9] 宋征宇.双捷联惯组单表级的冗余管理及信息融合技术[J]. 载人航天,2012,18(5):8-12.Song Zhengyu.Single table level redundancy management and information fusion technology for two strapdown inertial navigation systems[J].Manned Spaceflight, 2012, 18(5): 8-12.(in Chinese)
