机器人插件生产线的遮光设计与插件误差补偿*
2018-04-25吴文超陈一凡
吴文超,杨 斌,晏 亮,王 瑞,陈一凡
0 引言
电子元器件插件工艺是PCB加工制造过程的重要环节[1]。随着电子行业的快速发展,对PCB器件插件工艺的品质要求越来越高。为满足日趋严格的插件精度要求和日趋多样化的异型、特殊化元件插件需求,集成工业机器人和机器视觉技术的自动化插件生产线成为插件设备的发展趋势[2]。自动化插件生产线,以工业机器人为核心,采用模块化设计,配置相应的自动化供料装置与插件执行机构,并采用机器视觉实现对器件和PCB板的精确定位。
视觉识别的位置精度受到相机标定精度的影响[3],受机器人的绝对定位精度的限制,采用常用的相机标定方法[4]对相机进行标定后,直接使用机器人手臂进行插件,目前难以满足高精度插件定位的需求;此外,在使用视觉系统进行器件的针脚位置识别时,由于器件规格多样性、复杂性的影响,导致图像背景复杂,器件针脚的特征提取不准确,严重影响针脚识别的准确性。
为解决上述难题,本文在完成机器人自动化插件线系统设计的基础上,重点对遮光装置设计与插件位置补偿方法展开研究,确保插件的准确性与成功率。
1 机器人插件生产线组成
机器人插件生产线单个插件工位机械结构示意图如图1所示,主要包括用于识别元器件针脚的固定位置相机1,固定于机械臂上的用于PCB板定位的相机2,插件动作执行机器人,PCB板输送电机以及元器件上料气缸、PCB夹紧气缸等气缸。其硬件结构如图2所示,其中PLC主机负责插件生产线的工艺流程控制,工控机负责视觉系统的图像处理、坐标变化以及与PLC完成位置交互,控制界面用于实现与PLC的人机交互以实现对生产线的控制管理功能,显示器用于与视觉系统的处理参数设置以及视觉处理结果显示。
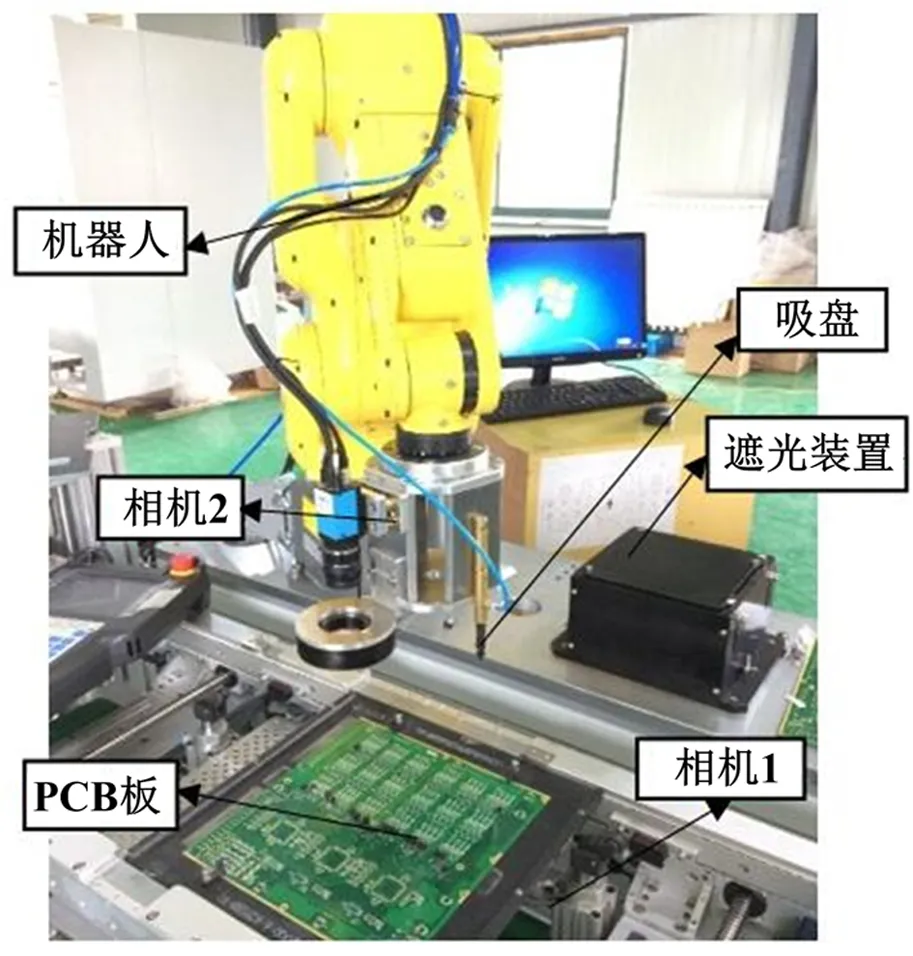
图1 插件机生产线单工位组成
图2 机器人插件生产线单工位硬件结构
插件生产线的插件步骤如下:
(1)输送带将PCB板输送到工位,机器人手臂移动至PCB板的MARK点上方,相机2对MARK点进行拍照,识别PCB板的位置;
(2)基于视觉定位(非固定位置上料)或位置示教(固定位置上料)等方式对待插件的器件进行初步定位;
(3)机器人从步骤2的定位位置处取元器件,将元器件置于相机1上方进行拍照,识别元器件针脚的准确位置;
(4)机器人将元器件插装于PCB板指定的位置,返回步骤(3)。
上述步骤过程中,一方面,在对元器件针脚进行拍照时,由于针脚弯曲,元器件针脚所在平面存在反光点,元器件针脚进行拍照的效果不佳,直接影响针脚图像识别的成功率与针脚像素坐标精度;另一方面,由于相机外部参数的误差,使得获得元器件的图像坐标转换得到元器件的插件坐标被引入误差,从而使得插件的成功率难以保证。
2 遮光装置设计
2.1 光照环境布置
自然光条件下,针脚在图像中的对比度低,需选用光源对针脚进行照射,以增强针脚图像的对比度。目前的元器件针脚的形式可分为三类,如图3所示。在进行光照环境布置时,仅希望将图3中针脚末端照亮,并且与针脚的其余部分的区分度尽可能大。

图3 针脚形式分类
器件针脚拍照时采用相机轴线与镜头轴线平行布置的方式,考虑到相机成像平面与针脚接近垂直,为使得针脚非针尖部分与针脚其余部分分开,初步选用低角度光对针脚末端进行360°照射,以增强针尖的亮度,使得针尖与其他位置区分开来。初步选用环形光源对针脚进行照射,以增强针尖处的亮度。
图4是使用环形光源对针脚进行打光的实验效果图。可以发现,针尖和针肩的在图像中的亮度区别不大,有黏连的情况出现,其将在对图像进行处理时,使得针脚识别不准确。
2.2 遮光装置设计
光源辅助成像增强了针脚亮度但同时带来了针脚受干扰的问题,需采用遮光装置遮蔽针肩的以消除其对针脚识别的干扰。遮光装置设计要求保证针脚亮度的同时,屏蔽针肩的亮度。插件环节中,元器件是通过机器人手臂夹取后置于相机2的上方,其位置存在一定的波动,遮光装置需保证在元器件位置变动的情况下,元器件针脚可正常放入遮光装置,并能实现对元器件的遮光。
如图5所示,遮光板小孔的大小设计受器件在拍照位置的定位精度有关,遮光板小孔与针脚的间隙余量需大于器件在料盘中的定位误差,料盘的重复装夹误差、机器人定位误差,以避免器件针脚与遮光板发生干涉。插件线将元器件从料盘移送到拍照位置各环节的定位精度如表1。
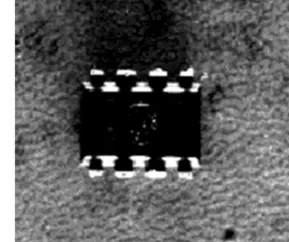
图4 针脚打光图像
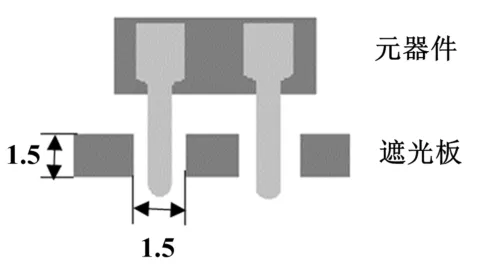
图5 遮光示意图

表1 误差链分析mm
表1中,料盘定位误差指的是相机通过料盘MARK点对料盘进行定位的误差,料盘装夹误差指的是元器件装夹在料盘上时元器件相对于料盘的定位误差,机器人定位误差指的是机器人定位运动的绝对定位误差,针脚误差指元器件针脚整形后,针脚实际位置与理论位置的偏差。
根据上述误差链关系,遮光板小孔的直径设计时需比针脚的直径大1.1 mm,才可保证机器人能够将元器件顺利地放置于遮光板的孔洞中。
根据上述分析,可得到光源角度与遮光孔直径的设计区间,选择DIP-8器件进行实验,遮光板厚度为1.5 mm,小孔宽度为1.5 mm。图6为遮光效果图。
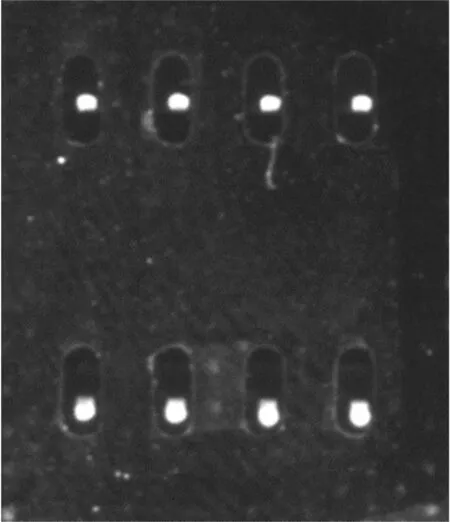
图6 DIP-8器件遮光装置遮光效果图
可以发现,采用该种方式进行遮光,可实现对目标器件良好的遮光效果,针对不同的器件,遮光板的遮光孔设计需按照器件的几何尺寸设计。
3 插件位置误差补偿
3.1 插件误差分析
插件误差指的是插件过程中器件针脚与PCB的对准偏差。机器人插件坐标处理流程如图7所示,可以将插件过程抽象为3个环节:
(1)通过相机2对PCB板进行定位,并根据元器件在PCB上的理论位置计算得到机器人坐标系器件插件坐标;
(2)通过相机1识别元器件在机器人坐标系中的坐标;
(3)通过机器人将元器件转移至插件位置,将元器件安插于PCB板上。
对于环节一与环节二,在通过相机获得机器人坐标系坐标,其精度受图像坐标识别精度的影响与相机外部参数误差的影响,存在较大的位置识别的误差;环节三误差表现为机器人的定位误差,主要为负载导致的机械臂变形导致的误差以及机械的重复性误差。
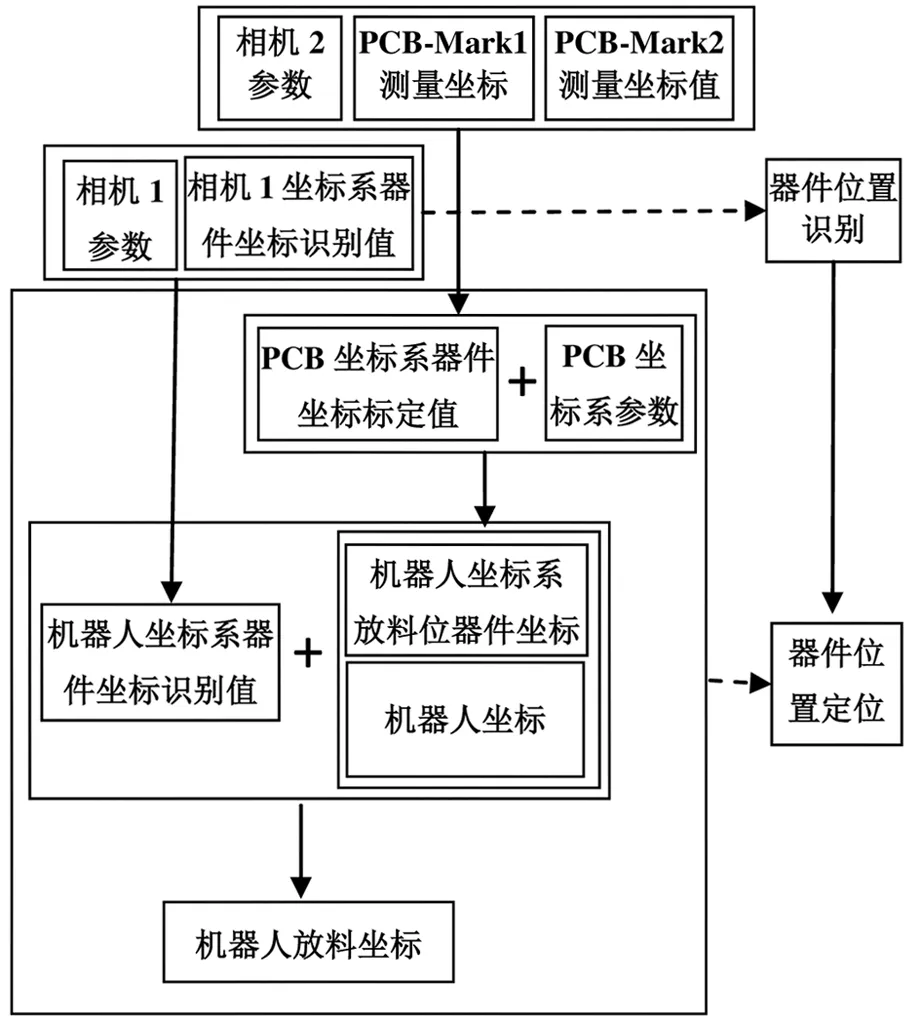
图7 插件坐标处理流程
位置识别误差中相机外部参数误差导致的图像坐标到机器人坐标变换过程的误差,在相机外部参数固定的条件下,同一识别位置其误差值是一常数,因此该误差是一项系统误差;机器人定位误差中机械臂变形导致的误差由负载和机械臂结构既定,在负载不变的条件下,也是一种系统误差。针对上述两种系统误差,设计了一种误差测定方法,通过补偿误差中的系统误差,以增加机器人插件位置的精度。
3.2 插件位置误差补偿方法设计
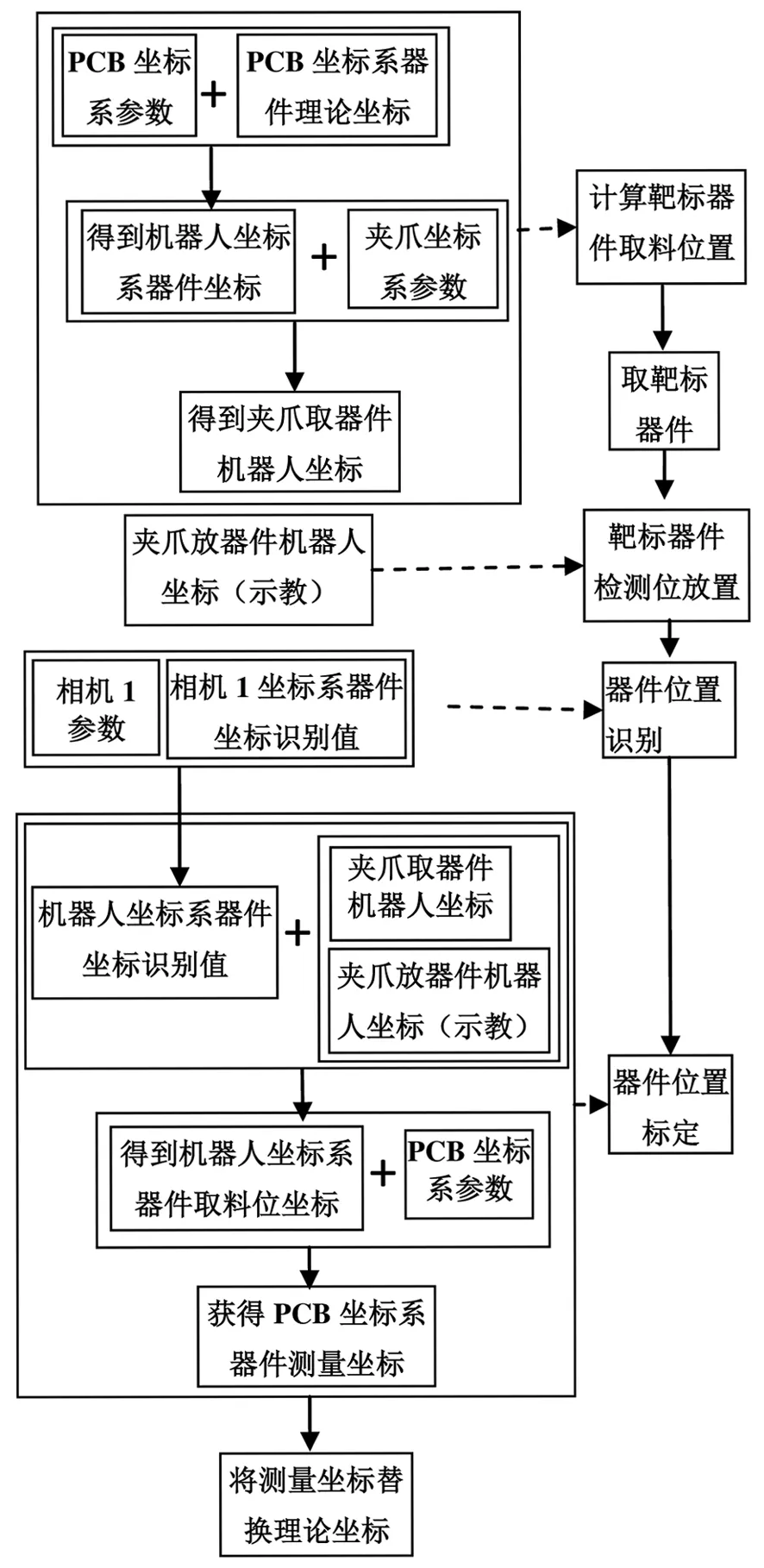
图8 插件误差补偿测定流程
插件误差补偿测定流程如图8所示。首先,通过相机2对PCB板进行定位,计算插件位置的世界坐标系中的位置,利用该位置导引机器人进行元器件的抓取,并将元器件针脚置于相机1视场中进行识别;其次,通过相机1识别元器件针脚的位置,并获得元器件针脚的世界坐标系位置;最后,计算元器件针脚在插件位置处的插件坐标,将该坐标换算到PCB板坐标系内,替换原有坐标值。
通过该方法,在特定相机外部参数下,可以测量PCB板器件理论位置处插件动作的实际插件坐标,从而获得PCB板器件的实测位置。该位置坐标值包含了相机1定位、相机2定位以及机器人定位的全部误差,利用该位置替换原有的PCB板器件理论位置,可对误差的系统误差部分进行有效的纠正。
4 实验验证
插件生产线采用FANUCLR Mate 200ID机器人,以及两套BalserAc-2500相机进行搭建,如图2所示。机器人的重复定位精度为0.02 mm,相机图像中单个像素对应的实际长度为0.015 3 mm,PCB板由传送带进行传送。
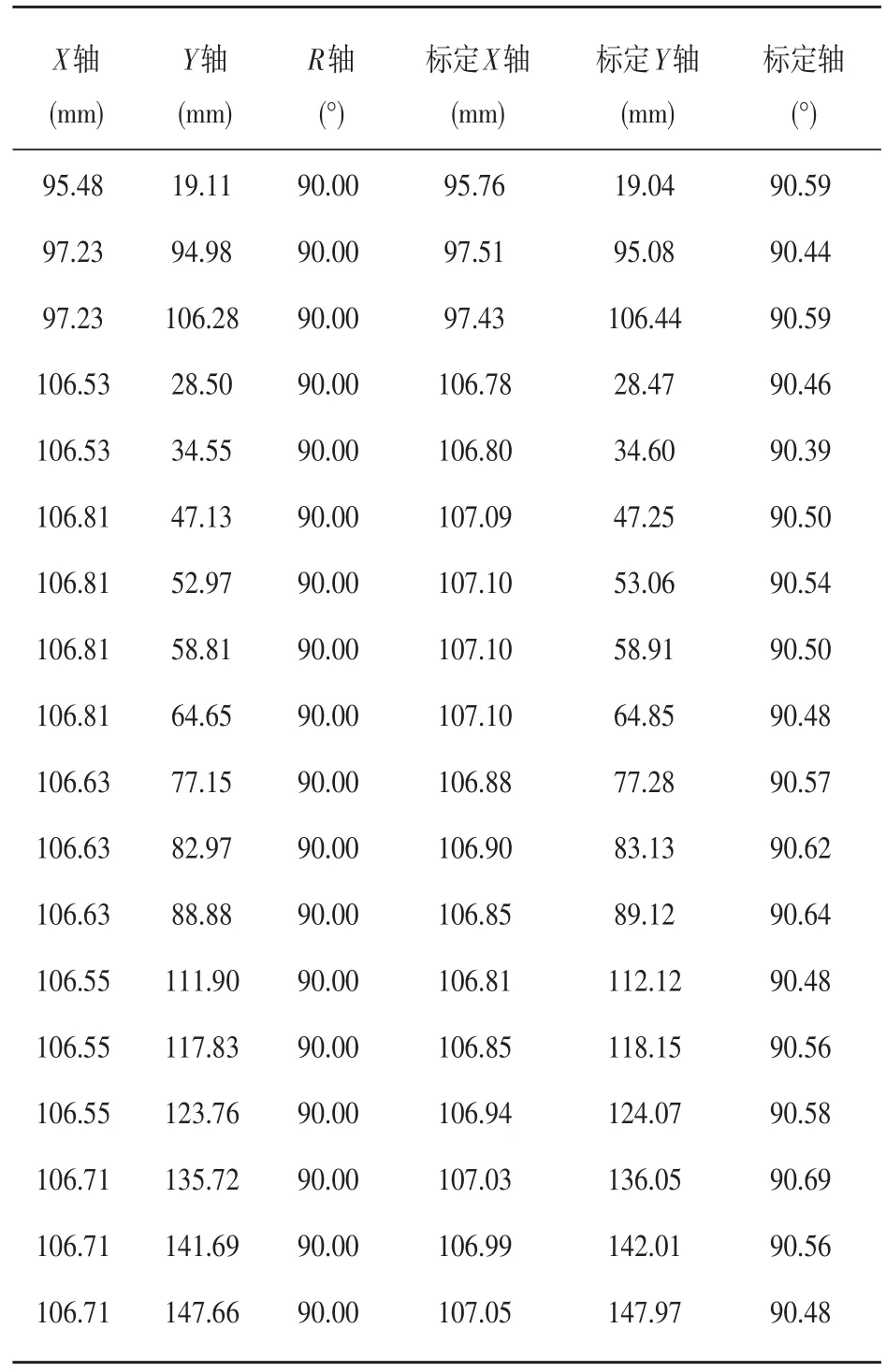
表2 DIP-4器件理论坐标及标定坐标值
机器人从料盘通过吸盘取器件,将器件针脚送入遮光板的遮光孔中,由固定相机2识别针脚的图像位置,根据相机外部参数、器件插件理论位置进行坐标变换获取机器人实际插件位置,最后由机器人完成定位插件动作。
实验中由于相机外部参数标定误差、机器人定位误差等误差的存在,由器件在PCB理论位置直接获取得到的实际插件位置无法进行正常的插件动作,本文按照章节4所述方法对DIP-4器件位置进行了误差补偿后,器件的PCB理论位置与其补偿后的位置如表2所示。
实验结果显示,标定值X轴,Y轴和角度三个方向的误差均为非零误差,其偏差值均值X方向为0.31 mm,Y方向为0.22 mm,角度方向为0.55°;波动范围X方向为0.25 mm,Y方向为0.70 mm,角度方向为0.40°。
最后本文利用上述标定的插件位置,根据插件流程进行了DIP-4,DIP-8,MOSFET,集成滤波器等元器件进行了插件实验,能够实现100%插件成功率的性能。
5 总结
本文基于机器人自动化插件线系统重点对遮光装置设计与插件位置补偿算法进行的研究,有如下研究结果:
(1)根据光照与器件的特点,设计了一种遮光装置,提高了器件针脚检测识别的准确性和成功率;
(2)设计了一种插件误差补偿方法,有效降低了相机外部参数误差以及机器人定位误差对插件误差的影响,可有效保证插件的成功率。
参考文献:
[1]樊融融.试论我国由电子制造大国走上电子制造强国之路[C].2010中国岳端SMT学术会议论文集,2010:19-30.
[2]曾友.异形电子元器件插件机的视觉检测方法与系统开发[D].广州:广东工业大学,2016.
[3]田梦倩.机器人视觉系统标定问题研究综述[J].工业仪表与自动化装置,2016(2):14-17.
[4]高立,胡泓,刘泽,等.基于机器视觉的自动插件机标定方法研究[J].机械与电子,2016(11):77-80.
