驾驶模拟器的发展历程及最新应用实例*
2018-04-25田顺谷亚蒙魏朗刘晶郁关闯
田顺 谷亚蒙 魏朗 刘晶郁 关闯
(长安大学,西安 710064)
1 前言
驾驶模拟器主要分为训练型和科研型[1]。训练型模拟器主要用于对驾驶员的驾驶技能训练和安全教育,目前已经得到了大规模应用。科研型模拟器作为各大车企和科研机构的主流开发模拟器,可应用于驾驶行为、汽车新技术以及“人-车-路”交通特性的研究,在保留驾驶员操作特点的同时,可完成相关的人车交互试验[2]。驾驶模拟器是集车辆实时监控系统、运动模拟系统、视景系统、声光系统和数据采集与传输系统于一体的虚拟现实仿真设备[3]。主要的硬件包括:主控计算机(计算汽车瞬时运动状态)、视景计算机(产生虚拟场景)、交换机、投影设备、虚拟场景显示屏、实车模型及待测硬件。
根据运动结构和沉浸感水平,科研型驾驶模拟器可分为低等级、中等级和高等级驾驶模拟器[1]。驾驶模拟器的研发投入与其保真度、沉浸感正相关[4]。低等级驾驶模拟器结构比较简单,主要有固定的座椅、固定的屏幕、带有力反馈的转向盘和踏板、声光系统等。其视景系统多为被动式,根据试验实际需要,通常采用一个或多个屏幕。具体的成本投入根据屏幕数量、操纵机构精准度的不同而有差别。中等级驾驶模拟器具有较为完整的整车模型,其运动系统通常具有较少的自由度。根据试验目的,可实现纵向、横向、横摆等运动[5]。此类模拟器有些采用全尺寸舱,有些则将较为精准的操纵机构安装在自制的半尺寸车体上。高级驾驶模拟器的运动有多个自由度,一般不少于6个自由度;为了获得更大的水平工作空间,采用主动式视景系统,即视景屏幕能适应模型车辆的运动,根据车辆当前行驶状态实时生成三维场景,呈现200°及以上的逼真视景[2]。
最近10年,驾驶模拟技术有了新的发展,应用领域也呈多样性。本文主要研究国内外驾驶模拟器的发展历程以及驾驶模拟技术的最新应用,为利用驾驶模拟器开展研究的科研人员提供思路。
2 高等级驾驶模拟器的发展历程
20世纪70年代初,德国大众汽车公司开发出世界上第一套驾驶模拟器[6],该模拟器由具有较少自由度的运动模拟系统驱动,仅包含横摆、侧倾、俯仰3个自由度[7],固定在平台驾驶位置前方的单一、平面的屏幕组成视觉成像系统为驾驶者提供场景。除此之外,在模拟平台没有布置额外的汽车功能和内部结构。随后,受大众公司的启发,瑞典国家道路与交通研究所(VTI)积极参与驾驶模拟器的开发,于1984年研发出第一代驾驶模拟器VTI-Ⅰ[8]。一个独立的汽车驾驶舱可在运动平台上进行侧向、横摆、侧倾和俯仰模拟运动,即运动模拟系统包含4个自由度[9]。同年,德国联邦国防军大学设计了与VTI-Ⅰ具有相同自由度并由液压装置驱动的驾驶模拟器[10]。
1985年,基于Stewart博士提出的Stewart结构[11](见图1),德国戴勒姆-奔驰公司开发了世界首套具有6自由度运动模拟系统的驾驶模拟器,应用独创的液压六足装置,车身可实现横摆、侧倾、俯仰、垂直、纵向、横向等6个方向的运动[12]。模拟驾驶舱为穹顶结构,内部嵌入6个阴极射线管(Cathode Ray Tube,CRT)投影仪,可呈现180°逼真视景,开启了高保真、多运动自由度高级驾驶模拟器的开发之路。该模拟器于1993年被升级为“先进驾驶模拟器”,与之前的设计最大的不同在于实现了运动系统在横向的延伸,运动执行机构液压足在横向实现了高达5.6m的偏移[13]。日本汽车研究所、日产公司也分别于1996年、1999年开发了类似结构的液压装置驱动的6自由度驾驶模拟器[14]。欧洲的宝马公司[15]和雷诺公司[16]分别在2003、2004年开发出了全尺寸6自由度驾驶模拟器。
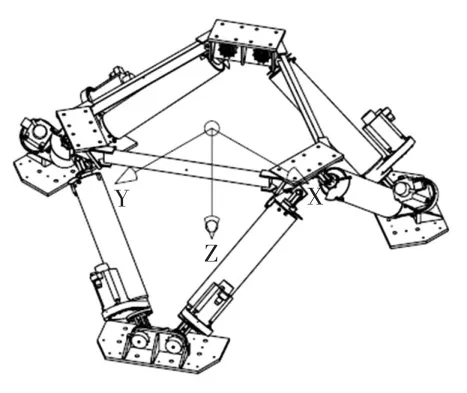
图1 Stewart结构
进入21世纪后,为适应汽车新技术和智能交通的发展,各大科研机构和车企竞相研发更高自由度和保真度的高级驾驶模拟器。2003年,爱荷华大学联合美国联邦高速公路管理局(Federal Highway Administration,FHWA)开发了当时最大规模、最先进的驾驶模拟器NADS-Ⅰ(见图2),具有12自由度运动系统[17]。该模拟器具有深度的再开发潜力,可以进行各种复杂的驾驶员-硬件在环试验,主要用于研究碰撞事故中的驾驶员因素以及交通风险应对机制[18]。该模拟器的Stewart结构安装在横纵导轨上(见图2),可实现复杂的横、纵2个方向的车-路交互。该模拟器最重要的特点是显著地拓展了平台基座X-Y系统的水平工作区[19],可达20m×20m。除了传统的专用液压装置,新增了转盘和振动试验台,基座X-Y系统由电动机驱动,六足机构、转盘和振动试验台均由液压装置驱动。在穹顶内部,全尺寸汽车结构放置在六足装置上方的转盘上,配备了8个液晶显示器(Liquid Crystal Display,LCD),可提供360°全视角交通场景。由于模拟舱内直接放置了整车,可以基于CAN总线进行数据采集,不需要试验人员安装额外的车用传感器,减少了工作量。

图2 NADS-I驾驶模拟器
2006年,英国利兹大学开发了UoLDS(见图3),是当今科研领域最先进的驾驶模拟器之一,主要用于研究车辆的自动控制系统对安全性的影响、驾驶员认知模式、道路安全设计等问题[20]。该模拟器具有8自由度运动系统,250°高清投影呈现逼真视景,8通道视觉信道以60 Hz频率更新,内置5个眼球跟踪仪。

图3 UoLDS驾驶模拟器
2008年,日本丰田东富士技术中心研发了高4.5m,内径7m的驾驶模拟器。它取代了NADS-Ⅰ,成为了当今规模最大的汽车驾驶模拟器[21]。其结构与NADS-Ⅰ非常相似,率先使用CarSim和TruckSim软件代替汽车动力学计算模型,两者最主要的区别在于平台转盘的转动位置[22]。丰田模拟器的汽车在穹顶结构内部做横摆运动,而NADS-Ⅰ则是转盘带动整个穹顶结构做横摆运动。丰田模拟器旨在还原普通驾驶信息,实现加速度幅值高达0.3 g、频率响应至少4 Hz的真实驾驶体验。360°球面屏幕呈现逼真的视景,要求视觉呈现延迟为63ms,所以丰田模拟器具有更高的逼真度和沉浸感。该模拟器主要用于进行在现实中太过危险的驾驶测试,分析行车安全性,包括驾驶员困倦、疲劳、醉酒、身体不适和注意力不集中等驾驶行为[1]。
2010年,戴姆勒-奔驰公司新研制的高约4.5m、内径约7.5m、具有7个自由度的高级驾驶模拟器成功问世[23]。电力驱动系统取代了之前的液压装置。由于过高运动质量的物理限制,平台很难实现横、纵2个方向运动能力的加强,该模拟器平台仅安装在单一方向的运动导轨上,通过无摩擦的空气轴承实现线性滑移[24],可实现纵向加速度0.1 g/s。该模拟器可平行或垂直安装在导轨上,进行纵向或横向的动力学试验,水平工作长度为12.5m,主要用于研究汽车悬架技术(如自适应阻尼系统)、车辆主动安全技术、辅助驾驶技术等。
以上的驾模拟器,一般均配有专门的控制室,便于对试验进程的控制和数据采集,如图4所示。
表1所示为21世纪国外代表性先进驾驶模拟器性能和应用领域的对比。以上几款高自由度驾驶模拟器具有高度的二次开发性,驾驶体验还原度高。但受结构等物理因素限制,运动能力不足,占地空间大,成本高昂。以NADS、戴姆勒、UoLDS驾驶模拟器为例,其峰值加速度和水平运动空间的提高程度与研发投入极不匹配[25]。就其运动水平而言,目前所有高级驾驶模拟器均不能执行基本的丁字路转向加速运动,更不必考虑更复杂的综合城市交通工况。

图4 NADS-Ⅰ模拟器控制室
为解决当前高等级模拟器性能水平与工作空间需求的矛盾,克服传统Stewart结构模拟器横、纵方向车路耦合不足的缺点,轮式自走式多自由度高级驾驶模拟器的构想应运而生。2002年,德国宝马公司的一项专利率先对轮式自走模拟器作了描述[24]。该平台至少有3个带有实心橡胶轮胎的驱动单元,每个车轮的引导角度为±180°。模拟舱内一辆实车模型通过三曲柄机构与平台底座连接,实现侧倾、俯仰和垂直运动。驱动车轮可进行前进和转向,实现平台的横向、纵向和横摆运动。德国于2015年实现了该概念驾驶模拟器的构造(见图5),国内目前尚未引进。

表1 21世纪国外代表性先进驾驶模拟器
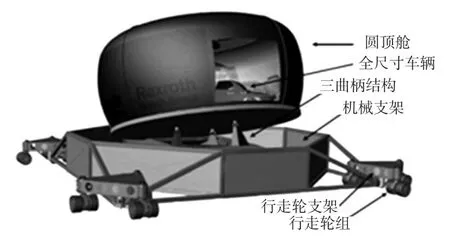
图5 轮式自走式驾驶模拟器
过去的几十年里,随着电力伺服技术和计算机技术的发展,驾驶模拟器的仿真水平和致动能力不断改进(见图6),致动模式也逐渐从少自由度、液压驱动向多自由度、电力驱动发展,使得模拟的受控环境与现实世界的驾驶条件吻合度持续增强[25]。
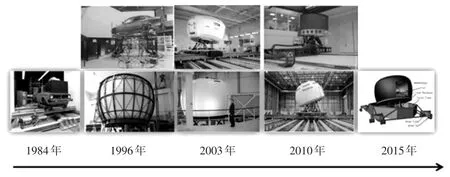
图6 驾驶模拟器的发展历程
相较于国外,我国科研型驾驶模拟器的开发起步较晚,但在高级驾驶模拟器上基本遵循了相似的发展规律。到20世纪70年代,我国才开始自主研制点光源、转盘机电式低水平驾驶模拟器。进入80年代,清华大学、吉林工业大学、装甲兵工程学院、空军第二航空学校等高校积极参与研发,并开发出一些初级产品[26]。自20世纪90年代以来,伴随着计算机技术和图形学的进步,以吉林大学、同济大学为代表的高校,开始自主研发具有高自由度、高保真的高级驾驶模拟器。
1996年,吉林大学汽车动态模拟国家重点实验室(ADSL)研发出我国首台6自由度驾驶模拟器[27],其建设规模和性能设计指标居世界前列,具有高度的可拓展性。该模拟器具有逼真的“驾驶员-车”交互界面,可实现“驾驶员-硬件”在环试验;基于经济可重复的交通场景,在安全可控的极限模拟工况下完成对汽车整车及其关键子系统的匹配、控制、分析和性能评价,以及用于道路安全评估、车用控制系统设计、驾驶员安全特性等领域的研究[28]。2010年,该模拟器完成了动力学模型的更新,拓展了运动机构的自由度,运动能力和精度都得到增强。
同济大学于2011年开发了具有8自由度运动系统的电动高级驾驶模拟器[29](见图7),其驾驶模拟舱为穹顶刚性封闭结构,后视镜由3块LCD屏幕组成。舱内的实车模型采用RenaultMeganeⅢ,保留轮胎,移除了发动机,其余与真车环境一致。5个投影仪安装在驾驶舱,刷新频率为60Hz,250°球面屏幕呈现逼真场景。法国公司OKTAL开发的SCANER软件为其提供软件控制。该模拟器的水平工作空间为20m×5m,运动能力较强,代表我国交通安全仿真实验室的顶尖水平,主要用于开展驾驶员行为模式、车辆安全技术、道路交通设计等领域的研究。

图7 同济大学驾驶模拟器
2 中、低等级底座模拟器
高等级驾驶模拟器发展到今天,功能上已经可以满足大多数研究人员的试验需求,而为了让更多的研究人员利用驾驶模拟技术,使用成本可接受、开发难度适中的驾驶模拟器成为目前的趋势之一。低自由度模拟器和固定底座模拟器越来越受到中、小型研究机构的青睐,尤其是固定底座驾驶模拟器,目前已成为在各领域使用最为广泛的模拟器类型。
低自由度模拟器的配置较为灵活,结构形式也更为多样。研究人员根据试验方案,首先确定试验中的车路主要交互需求,然后据其确定相应的运动自由度。图8给出了一种2自由度模拟器,可以模拟车身纵向和横摆2个自由度[30]。导轨下面的2个电机通过钢带实现车身的纵向运动,车体下方的独立电机可实现车身的横摆运动,从而实现基本的车身运动需求。

图8 2自由度模拟器
起初,固定底座模拟器主要用于驾驶员培训,随着中、高等级模拟器的发展,固定底座模拟器在融合中、高级驾驶模拟器的部分技术后,也在各方面取得了进展,得到了广大科技人员的青睐。主要原因是:驾驶员安全特性、城市交通安全等研究课题对车辆运动特性要求不高,固定底座模拟器可以满足相关试验需求;固定底座模拟器结构简单,搭载的车用传感器少,开发、维护方面的投入较低。根据试验对沉浸感的要求程度以及试验经费,试验人员可以搭建不同沉浸程度的固定底座模拟器,如图9所示。主要分为半尺寸驾驶模拟器和全尺寸驾驶模拟器[31]。其中,半尺寸驾驶模拟器根据试验需求也可以装配不同数量的显示屏;全尺寸模拟器一般装配多个投影仪和环形屏幕,并配有整车,可以获得更强的沉浸感,车辆运行数据可直接通过CAN总线采集。

图9 固定底座模拟器
进入21世纪,在软件方面,为了提高场景编辑的方便性,日本的FORUM8为研究人员提供了便捷的VR实时开发工具Uc-win Road,试验人员可以通过点击轻松完成对驾驶场景的设置,但是该软件在大规模场景建设方面弱于Multigen Creator,而利用法国的Silab也可以通过简单的程序设置完成专业的场景设置,这些都无疑降低了运用固定底座驾驶模拟器开展研究的门槛,提高了场景编辑的方便性。
3 驾驶模拟器技术的最新应用
传统的驾驶模拟器主要应用在汽车技术的研究与开发、驾驶心理学研究、交通设施优化等领域[32-34]。近年来,随着汽车智能技术的发展以及交通安全领域的迫切需求,驾驶模拟器在更多扩展领域有了新的应用,如无人车技术开发、高龄驾驶员行为模式研究等领域。同时,根据研究需要,研究人员也开发出了联合驾驶模拟器、可重构驾驶模拟器等。
3.1 在无人车技术开发上的应用
无人车是集环境感知、路径规划、多种辅助驾驶功能于一体的综合系统,涉及现代传感器、计算机、无线通讯、人工智能和自动控制等技术。无人车需具有实时感知外界交通场景的能力,并根据周围环境设定轨迹,自动完成既定目标驾驶任务。驾驶模拟技术可通过在场景中加入不同车速的外部车辆以及设置逼真的交通环境来提供足够的交通信息,为任务的解决方案提供试验条件。值得一提的是,2017年1月,美国交通部指定了10个无人车技术测试试点单位,其中4个研究机构使用驾驶模拟器作为测试手段[35]。
横向运动策略和交叉口通过策略一直是无人车研究的难点。2011年,日本东京农工大学的Wan等[36]利用6自由度驾驶模拟器研究了无人车超车过程中的横、纵向最优加速度算法。2016年,清华大学的Luo等[37]利用固定底座的驾驶模拟器验证了基于车辆短程通讯定位技术的路径规划策略,结果表明该策略可有效规避换道风险。同年,为了判断交叉口交通交互形式的强度,北京理工大学的研究人员[38]研究了基于交通强度认知的交叉口决策算法,结果表明,相较于有人驾驶车辆,利用此策略的无人车通过交叉路口的安全系数更高。
3.2 在高龄驾驶员行为模式研究上的应用
为验证与评估高龄驾驶员行为表现标准的合理性,以及确定高龄驾驶员与机动车事故的关联因素,澳大利亚的Lee等[39]进行了高龄驾驶员驾驶特性研究,129名60岁左右的驾驶员自愿参加了此次研究。在模拟器环境下,通过合理的驾驶任务测试高龄驾驶员的行为表现,经过反复试验,得到了10种可靠的标准场景[40]用于评估高龄驾驶员安全特性测试。在一项关于高龄驾驶员的逻辑回归分析如何影响自述碰撞事故数的驾驶模拟器试验中,研究结果表明,随着年龄的增加,高龄驾驶员的驾驶技巧不断削弱[40]。超过60%的参与者在过去1年至少发生1次机动车事故,而且高龄驾驶员与交通事故发生有关的认知能力,包括工作记忆、应急决策和高速驾驶的自信心等,均严重下降。最近,新英格兰大学交通中心[41]进行数据统计得知,在所有类型的交通事故中,绝大多数高龄驾驶员的死亡发生在道路交叉口机动车碰撞事故中。Craig A[42]利用驾驶模拟试验发现其原因在于高龄驾驶员在通过交叉路口时不倾向于观察周围环境,即缺乏发现潜在威胁的能力。
3.3 联合驾驶模拟器应用技术
联合驾驶模拟技术在交通安全领域的应用愈发广泛。研究表明,由于驾驶员缺乏必要的视觉信息,44%的交通伤亡事故发生在交叉路口,其中75%以上发生在城市道路[43],因此,多车交互研究具有一定的必要性。此前,在一项考察车载视听反馈系统的作用的研究中[44],该系统能为驾驶员实时提供其他驶近本十字路口车辆的速度和方位的可视化信息,但需要控制程序自动生成其他靠近的车辆。而最新的研究中,2个驾驶模拟器的联合使用确保了参与者和干扰者在同样的虚拟环境中行车[44]。在另一项研究中,25组试验者分别通过已打开视听告警显示设备和关闭了该设备的路径进入模拟环境,每条路径包含22个道路交叉点。参与者利用驾驶模拟器在某些交叉点保持速度或者减速靠近试验者。试验结果表明,相较于未配备视听显示设备的车辆,安装视听显示设备的车辆能够有效减少交通事故,提高交通效率[45]。Wolshon等[46]利用联合网络模拟器考察同一交通环境下多驾驶员交互行驶的表现,来评估复杂交通环境的安全性。在一项基于联合网络模拟驾驶技术的研究中,Dumitrescu等[47]利用千兆以太网连接的25台个人计算机创建的网络平台验证了协同的高级驾驶辅助系统(Advanced Driver Assistant Systems,ADAS)对驾驶员主观感受的影响。
3.4 可重构驾驶模拟器的应用
ADAS对车辆的影响越来越复杂,使得越来越难以理解与分析其功效及其与驾驶员间的相互作用。驾驶模拟器可提供可重复、安全、经济的试验环境用于开发和验证汽车新系统及其子系统。然而,驾驶模拟器通常为特定目标设计和建造,以便在预定义的环境中支持特定的分析任务。此类型的驾驶模拟器用来适应和支持新功能或应用程序时非常复杂、耗时,因此往往不可行。为了增加二次开发的灵活性,专为适应多种特定新功能的可重构驾驶模拟技术应运而生[48]。各种仿真模型、软件和硬件组件构成驾驶模拟器需要的多种组合以适应不同的特定目标[49]。此外,还有不同层次的细节模型,从简单的低保真度模型到其各自的复杂高端模型。同时,硬件组件包含能实现ADAS测试下不同功能和特定层面的模拟器设置。可重构驾驶模拟器具有兼容软件和硬件的接口和可靠的检查机制来实现系统配置的一致性。2007年,中佛罗里达大学的研究人员[50]研发了实车模型可更换的可重构驾驶模拟器,为多学科交叉的交通工程领域提供科研平台。2013年,拥有德国最庞大电轨网络的柏林运输公司[50]开发了BVG驾驶模拟器,其可根据特定技术目标重置运动模拟系统,用于研究有轨电车驾驶员的行为模式。
4 结束语
目前,针对相应的研究需求,已经开发出了各种级别的驾驶模拟器。高保真、沉浸感强的驾驶模拟器为智能交通和汽车智能技术等领域提供了安全、可重复、经济的验证和开发技术。除此之外,驾驶模拟器的应用在以下2个方面需要进一步探讨:
a.有效性难以确定。驾驶模拟器应用存在的问题之一是其有效性。虽然计算机技术和图形技术不断发展,现实世界的复杂性仍不能完全被复制,驾驶模拟器的实际运行速度与环境细节量成反比。此外,受限于车辆动力学模型的精确度和模拟操作水平,高级驾驶模拟器的横、纵运动的保真度差。大量研究表明,驾驶模拟器的显示行驶速度大于实际道路行驶速度。Riemersma[51]和Harms[52]利用可X、Y方向移动的高等级驾驶模拟器在农村、城市的直线和曲线道路上模拟行驶,与实际道路行驶相对比,发现了两者的速度差异显著,并且横向位置变化大。在一项利用VTI驾驶模拟器验证其有效性和逼真度的研究中,对比使用同一模拟器的不同研究项目,结果发现,在防撞预警系统和视觉增强系统测试中均出现较低现实水平,即模拟结果与实际情况完全不相符。所以,利用驾驶模拟器得到的结果在与现实世界的行为符合程度上难以确定。
b. 驾驶模拟的不适性(Driving Simulator Sick⁃ness)。模拟驾驶的不适性是增强真实驾驶体验、保真度和沉浸感的严重阻碍,这一症状在不同模拟器或同一模拟器的不同参与者之间差异显著。不适范围从轻微晕眩、恶心到严重运动失调、呕吐不止。产生该现象的原因包括:控制回路的滞后和延迟,即不恰当的控制反馈信息滞后降低了车载系统的可控性和稳定性;未能在模拟器计算系统中适当地对车辆建模以及未能准确地匹配模拟器和实际车辆的动态特性;控制负载因素,例如阻尼;运动系统因素,如Barrett和Thornton[53]提出固定底座驾驶模拟器的操作者更容易出现不适,因为操作者在视觉上感知车辆运动的改变,但从未感受到相应的物理加速度或位置变化;视觉系统因素,如显示方式、目视水平视野、场景细节、视频帧率和显示失真等;座舱环境因素,如模拟舱关闭后,舱内温度和湿度的控制等。以上可能因素为开发真正意义上的高沉浸感模拟器提供了方向。
[1]Slob J J.State-of-the-Art Driving Simulators,a Literature Survey[R].Eindhoven:DCTReport,2008,107:6-7.
[2]Chen L K,Ulsoy A G.Identification of a Driver Steering Model,and Model Uncertainty,from Driving Simulator Data[J].Journal of Dynamic Systems,Measurement and Control,2001,123(4):623-629.
[3]LeeW S,Kim JH.A Driving Simulatorasa Virtual Toll[C]//Proceedings of International Conference on Robotics&Automation,Leuven,Belgium,1998.
[4]Blana E.A Survey of Driving Research Simulator Around the World[R].Leeds:ITSWorking Paper,1996.
[5]David H W,Allen J C.A Survey of Mid-Level Driving Simulator[J].SAETechnicalPaper,Number950172,1995.
[6]Richter B.Driving Simulator Studies:The Influence of Vehicle Parameters on Safety in Critical Situations[J].SAE Technical Paper,Number741105,1974.
[7]Nordmark S.Driving Simulators,Trends and Experiences[C]//Driving Simulation Conference,Paris,France,1994.
[8]Nordmark S,Jansson H,Sehammar H,et al.The New VTI Driving Simulator.Multi Purpose Moving Base with High Performance Linear Motion[C]// Driving Simulation Conference,Paris,France,2004.
[9]Nilsson L.The VTI Driving Simulator[R].Linkoping:VTI Report150,1989.
[10]Meywerk M.Driving Simulator Mars.[EB/OL].[2007-02-21].http://www.hsu-hh.de/meywerk.
[11]Stewart D.A Platform with Six Degrees of Freedom[J].Proceedings of the Institution of Mechanical Engineers,1965,180(1):371-386.
[12]Drosodl J,Panik F.The Daimler-Benz Driving Simulator a Tool for Vehicle Development[J].SAE Technical Paper No.850334,1985.
[13]KadingW.The Advanced Daim ler-Benz Driving Simulator[R].Tokyo:Society of Automotive Engineersof Japan,1995.
[14]Yoshimoyo K,Suetomi T.The History of Research and Development of Driving Simulators in Japan[J].Journal of Mechanical Systems for Transportation and Logistics,2008,1(2):159-169.
[15]Alexlander H,Josef N.Applications to Driving Simulation and Their Requirements to the Tool[C]//Motion Simulation Conference,Braunschweig,2007.
[16]Dagdelen M,Reymond G,Kemeny A,et al.MPC Based Motion Cueing Algorithm:Development and Application to The Ultimate Driving Simulator[C]//Conférence Simulation De Conduite,2004:221-233.
[17]Haug E J.Feasability Study and Conceptual Design of a National Advanced Driving Simulator[M].Iowa City:University of Iowa,1995.
[18]Mcdolad A D,Schwarz C,Lee J D,et al.Real-time Detection of Drowsiness Related Lane Departures Using Steering Wheel Angle[J].Proceedings of the Human Factors and Ergo-Nomics Society AnnualMeeting.Boston:Sage Publications,2012,56(1):2201-2205.
[19]Clark A J,Sparks H V,Carmein JA.Unique Features and Capabilities of the NADS Motion System[C/CD]//Proceedings of the 17th International Technical Conference on the Enhanced Safety ofVehicles.Netherland,2001.
[20]Jamson H.Driving Me Round the Bend–Behavioural Studies Using the New University of Leeds Driving Simulator[C]// 2nd Motion Simulator Conference,Braunschweig,Germany,2007.
[21]Challen J.Reality bytes:Driving Simulators[M].2008:50-53.
[22]Murano T,Yonrkara T,Aga M,etal.DevelopmentofHigh-Performance Driving Simulator[J].SAE International Journalof Passenger Cars-Mechanical Systems,2009,2(1):661-669.
[23]Crivellaro C,Franco JM V.Methodology for Getting a 7 Degree of Freedom Vehicular Model for Active Suspension Control System Design:2007-01-2676[R].Michigan:SAE TechnicalPaper,2007.
[24]Alexander B.Feasibility Analysis and Design of Wheeled Mobile Driving Simulators for Urban Traffic Simulation[M].New York:VDI-Verlag,2015.
[25]Huesmann A,Nauderer J.Applications to Driving Simulation and Their Requirements to The Tool[C]//Motion Simulation Conference,Braunschweig,2007.
[26]孙显营,熊坚.车辆驾驶模拟器的发展综述[J].交通科技,2001(6):48-50.
[27]杨建森.面向主动安全的汽车底盘集成控制策略研究[D].长春:吉林大学,2012.
[28]王晶,刘小明,李德慧.驾驶模拟器现状及应用研究.汽车与船舶[J].2008(11):160-164.
[29]涂辉招,李振飞,孙立军.驾驶模拟器运动系统对自由驾驶行为的影响分析[J].同济大学学报(自然科学版),2015,43(11):1696-1702.
[30]AriouiH,Hima S,Nehaoua L.2 DOFLow Cost Platform for Driving Simulator: Modeling and Control[C]// 2009 International Conference on Advanced Intelligent Mechatronics.IEEE,Singapore,2009:1206-1211.
[31]Nehaoua L,Mohellebi H,Amouri A,et al.Design and Control of a Small-Clearance Driving Simulator[J].IEEE Transactions on Vehicular Technology,2008,57(2):736-746.
[32]Groot SD,Ricote F C,Winter JC FD.The Effect of Tire Grip on Learning Driving Skill and Driving Style:A Driving Simulator Study[J].Transportation Research Part F Psychology&Behaviour,2012,15(4):413-426.
[33]清华大学虚拟现实与人机界面实验室.虚拟现实驾驶模拟系统研制 [EB/OL].http://www.ie.tsinghua.edu.cn/~zhangwei/vrhit/research_project1.htm.
[34]Abdelgawad K,Gausemeier J,Dumitrescu R,et al.Networked Driving Simulation:Applications,State of the Art,and Design Considerations[J].Designs,2017,1(1):4.
[35]US Department of Transportation.U.S.Department of Transportation Designates 10 Automated Vehicle Proving Grounds to Encourage Testing of New Technologies[EB/OL].[2017-1-19].https://www.transportation.gov/briefingroom/dot1717.
[36]Wan L,Raksincharoensak P,NagaiM.Study on Automatic Driving System for Highway Lane Change Maneuver Using Driving Simulator[J].Journal of Mechanical Systems for Transportation and Logistics,2011,4(2):65-78.
[37]Luo Y,Xiang Y,Cao K,etal.A Dynamic Automated Lane Change Maneuver Based on Vehicle-To-Vehicle Communication[J]. Transportation Research Part C:Emerging Technologies,2016,62:87-102.
[38]Song W,Xiong G,Chen H.Intention-Aware Autonomous Driving Decision-Making in an Uncontrolled Intersection[J].Mathematical Problems in Engineering,2016,5(3):1-15.
[39]Lee H C,Lee A H,Cameron D,et al.Using a driving simulator to identify older drivers at inflated risk ofmotor vehicle crashes[J].Journal of Safety Research,2003,34(4):453-459.
[40]Levine R E,Brayley C R.Occupation as a Therapeutic Medium—A Contextual Approach to Performance Intervention[J].2001,592-631.
[41]Brayne C,Dufouil C,Ahmed A,et al.Very Old Drivers:Findings from a Population Cohort of People Aged 84 And Over[J].International Journal of Epidemiology,2000,29(4):704-707.
[42]Craig A S.Older Driver Simulator Based Intersection Training:The Evaluation of Training Effectiveness and Simulator Sickness[D]. Amherst: University of Massachusetts,2015.
[43]Maas J.SWOV–Institute for Road Safety Research in the Netherlands[J].IATSSResearch,2006,30(1):122-125.
[44]Nees M A,Walker B N.Auditory Displays for In-Vehicle Technologies[J].Rev Human Factors Ergonomics,2001:58-99.
[45]Houtebbos M,Winter JC F,Hale A R,et al.Concurrent Audio-Visual Feedback for Supporting Drivers at Intersections:A Study Using Two Linked Driving Simulators[J].Applied Ergonomics,2017,60:30-42.
[46]Wolshon B,Pande A.Traffic Engineering Handbook:Institute of Transportation Engineers[M].Hoboken,NY,USA:Wiley&Sons,2016:217-225.
[47]Dumitrescu R,Anacker H,Gausemeier J.Design Framework for the Integration of Cognitive Functions into Intelligent Technical Systems[J].Production Engineering,2013,7(1):111-121.
[48]Hassan B,Gausemeier J.Concept for a Task–Specific Reconfigurable Driving Simulator[J].New Library World,2013,114(11/12):542-549.
[49]Hassan B,Berssenbrugge J,Qaisi IA,etal.Reconfigurable Driving Simulator for Testing and Training of Advanced Driver Assistance Systems[C]//Proceedings of International Symp.on Assembly and Manufacturing(ISAM 2013),Xian,China,2013.
[50]Gue D,Klee H,Radwan E.Comparison of Lateral Control in a Reconfigurable Driving Simulator[C]// Driving Simulation,North America 2003(DSC- NA 2003),Dearborn,Michigan,USA,2003.
[51]Riemersma J B J,Van A R A,Hoekstra W,etal.The Validity of a Driving Simulator in Evaluating Speed-Reducing Measures[J].Traffic Engineering& Control,1990,31(7):416-420.
[52]Harms L.Driving Performance on a Real Road and in a Driving Simulator:Results of a Validation Study[C]//Proceedings of the 5th International Conference on Vision in Vehicles,Glasgow,USA,1993.
[53]Barrett G V,Thornton C L.Relationship Between Perceptual Style and Simulator Sickness[J].Journal of Applied Psychology,1968,52(4):304-308.
