基于模糊C均值和神经网络的驾驶行为评价研究①
2018-04-21吴紫恒吴仲城
吴紫恒, 吴仲城, 张 俊, 陈 松, 陈 杰
1(中国科学院 合肥物质科学研究院,强磁场中心,合肥 230031)
2(中国科学技术大学,合肥 230031)
随着社会的快速发展,汽车己经是越来越多人首选交通工具,给人们出行带来了非常大的便捷. 但另一方面汽车数量的快速増长,会给公路交通带来一定的压力,交通拥挤、交通事故等现象对人们的生活造成了不小的影响,同时也阻碍了交通运输的发展. 驾驶行为与道路交通安全有着紧密联系[1]. 规范驾驶人的驾驶行为是保障道路交通安全的重要举措[2]. 近年来,有关驾驶行为与道路安全关系的研究备受关注,牛增良等以大量重特大交通事故数据为基础,通过聚类分析从危险驾驶行为角度研究外部影响因素与驾驶行为的关系[3]; 钱宇彬等以油门踏板行程与车速作为操作行为基本参数,通过聚类分析实现基于驾驶行为特性的长途客车驾驶时间和换班管理方法[4]; 庄明科等人探讨了风险驾驶行为与驾驶经验、驾驶技术、驾驶态度以及驾驶员的人格之间的关系[5]; 孙伟等进行了疲劳驾驶行为的研究[6]; 任慧君等提出了基于GPS数据的驾驶行为特征提取方法,统计分析了GPS轨迹数据,但缺乏深入挖掘数据背后的信息[7]; 白云等认为危险驾驶行为可以是失误性驾驶行为、错误性驾驶行为、非故意违规的驾驶行为和过激性驾驶行为[8]; Tseng通过对中国台湾地区出租车的超速驾驶数据的研究发现,驾驶员的行驶风格、工作时长和日行驶距离与超速驾驶之间有着密切的联系[9]; Herrera等搭建了基于GPS定位手机获取交通数据的系统平台,但未将其与驾驶行为关联[10];Greaves等采用GPS技术获取驾驶数据以其弥补问卷调查精度不高的问题,但其仅挖掘了驾驶人超速驾驶行为[11].
目前,对驾驶速度行为的评价一般是通过一系列的驾驶行为减分单元: 急加速减分单元、急减速减分单元、急转弯减分单元等,根据急加/减速、急转弯次数等数据进行减分,实现驾驶行为评级分数计算[12]. 评价过程的主观性较强,评价结果不够科学、准确. 当前鲜有从数据挖掘的角度出发研究驾驶行为与道路安全的潜在关系. 本文从车联网数据库中查询样本车辆的行驶卫星定位信号集合并提取驾驶行为特征参数,以此为指标通过模糊 C 均值聚类 (Fuzzy C-Means,FCM)聚类算法实现驾驶行为的科学聚类,得到驾驶行为特征参数的聚类结果; 根据FCM聚类结果,选取其中的典型样本作为训练样本,利用BP网络进行学习,利用训练后BP神经网络分类器对经归一化处理的待分类驾驶行为进行分类评价. 本文通过对车联网数据进行聚类分析,提高了驾驶行为评价的准确性和科学性,建立了车联网数据、驾驶行为特征、道路安全三者的关联机理.
1 基于模糊C均值和神经网络的驾驶行为评价算法
本文所提出的基于模糊C均值和神经网络的驾驶行为评价算法流程图如图1所示,其步骤为: (1) 基于车联网大数据选取样本数据,提取驾驶行为特征参数;(2) 确定聚类个数,运行FCM聚类算法得到基于车联网大数据的驾驶行为聚类结果; (3) 根据FCM算法的聚类结果及隶属度约束条件选取典型样本; (4) 设计并创建BP网络,将典型样本聚类结果归一化作为训练样本,训练BP网络; (5) 待评估的驾驶行为样本归一化,利用训练完毕的BP神经网络进行驾驶行为评价.
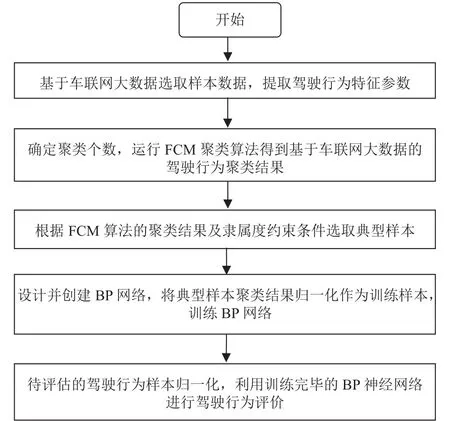
图1 基于FCM聚类和BP神经网络的驾驶行为评价方法算法流程
1.1 驾驶行为特征参数提取
车联网数据来自某车辆监控平台,被监控车辆已装备车载终端设备,利用北斗卫星导航系统测定车辆的地理位置,并实时报告车辆地理位置、瞬时速度和运行方位角等信息,k时刻每个采样点的信息为,其中t为时间,v为速度,j为经度,w为纬度,h为方向角.
根据任意连续采样点的信息,可以计算车辆在k时刻的加速度值Ak:

根据给定的急加速的加速度阈值和急减速的加速度阈值可以判断车辆是否发生急加速和急减速. 根据给定的急转弯的速度限值和行驶方向改变阈值,可以判断车辆是否发生了急转弯. 通过以上判断获得车辆的瞬时速度、急变速、急转弯的时间和位置,并进行相关统计,可以获得驾驶行为特征参数: 速度80-120 km/h时间占比、速度>120 km/h时间占比、100 km平均急变速次数、100 km平均急转弯次数.
1.2 模糊C均值算法(FCM)
给定数据X,FCM算法[13]将X划分成C类,其聚类中心为,分类结果用隶属度表示,其中隶属度集为U. FCM的目标函数定义为:
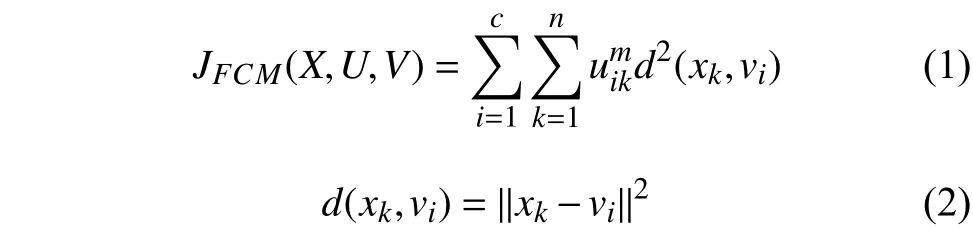
其中U必须满足:

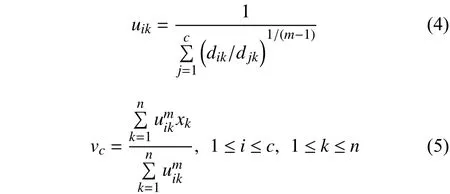
由于很难直接求解此类目标函数的最优值,在实际应用中一般采用交互优化的求解方式即交替迭代,直至目标函数收敛到指定精度内的最优值. 在迭代过程中,模糊隶属度和聚类中心的更新式如式(4)和式(5):
针对FCM算法随机选取初始聚类中心易使算法收敛到陷入局部最小的问题,本文引入了一种初始聚类中心的选取方法[14]对传统FCM算法进行改进. 初始聚类中心选择的步骤为:
步骤1. 计算任意两个样本间的距离,并生产距离矩阵D,将距离最近的两个样本定为一类,并取两个样本点的中点作为第一类聚类中心.
步骤2. 选定距离阈值a,利用距离矩阵D计算与第一类中的两个样本距离都大于a的所有样本,并在这些样本选择距离最近的两个点定为一类,取两个样本的中点作为第二类的聚类中心.
步骤3. 同理,在剩下的样本中找到与已经找到的样本距离都大于a的样本,并选择这些样本中的距离最近的两个点定为一类,并取两个样本点的中点作为其聚类中心.
步骤4. 重复步骤3,直到找到C类聚类中心为止.
基于驾驶速度行为数据的FCM聚类算法流程图如图2所示.
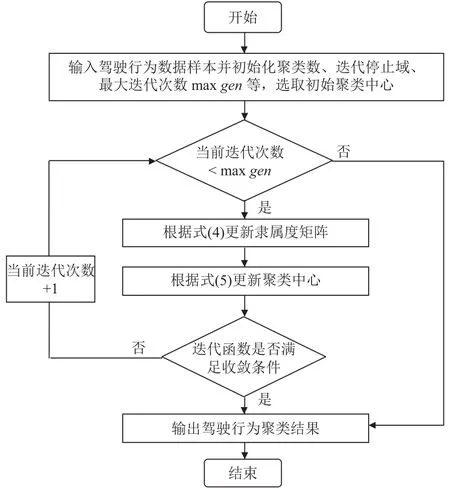
图2 基于驾驶行为特征数据的FCM聚类算法流程图
1.3 典型样本选取
FCM聚类作为非监督聚类算法,可以根据预先设定的类别数自动聚类,并得到每个样本隶属于各个类别的隶属度矩阵. 本文所说的典型样本为仅对某个类别具有较高隶属度而对其他类别隶属度极低的样本.本文根据FCM聚类结果隶属度矩阵U自动挑选BP神经网络的训练样本Y(i),训练样本需要满足如下的约束条件:

式中U为利用FCM算法对驾驶行为数据聚类后得到的隶属度矩阵;为样本Y(i)的隶属度矩阵中最大值和次大值;U*、U#为设置的用于挑选典型样本的阈值. 本文U*设置为0.5,U#设置为0.2.
1.4 BP神经网络结构设计
神经网络已经被广泛应用于人工智能、机器学习等领域,其中,BP神经网络是目前应用最广泛的神经网络模型之一,BP神经网络是一种按误差逆向传播算法进行训练的多层前馈网络. 已经证明,具有sigmoid非线性函数的三层神经网络可以任意逼近任何连续函数[15],因此本文采用三层BP神经网络结构. BP神经网络由输入层、隐含层和输出层组成. 其中输入层作为神经网络的输入对应输入特征向量,本文中驾驶行为特征参数为4维,即BP神经网络的输入节点为4个;隐含层由10个神经元组成; 输出层对应分类的结果,本文输出层节点数为1,数值为驾驶行为对应的类别.将典型样本聚类结果归一化作为训练样本,训练BP网络,利用训练完毕的BP神经网络进行驾驶行为分类评价.
2 仿真实验
车联网数据来源于某车辆监控平台,共500辆车,一个月的驾驶行为特征提取后的数据如表1所示.
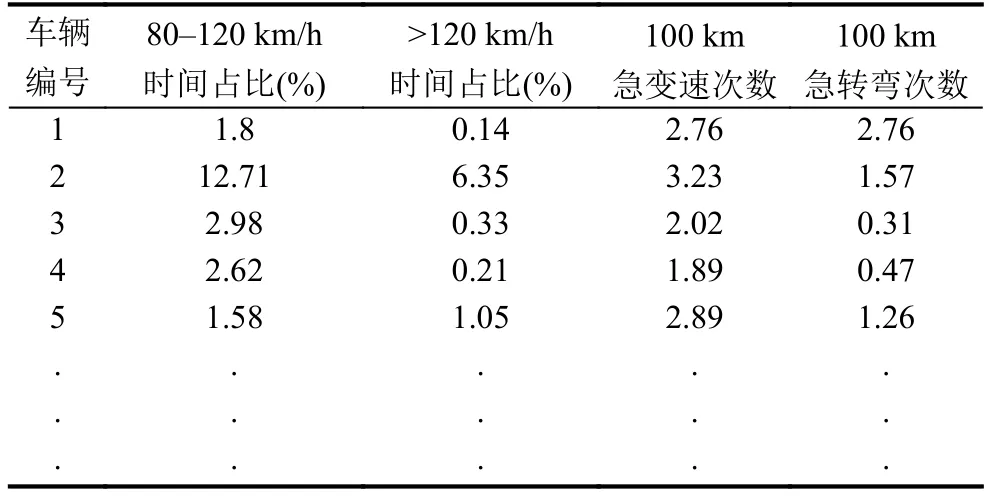
表1 驾驶行为特征参数数据(部分)
高速行驶往往会造成交通事故,研究表明,车速越高,发生事故的风险越大,微小的车速变化会急剧提升发生事故的概率,在不同的道路环境中,最高安全行车速度是不同的; 车辆加速度急剧变化时,会给驾驶员不舒适的感觉,因而急加速或急减速都存在一定的安全隐患; 在车辆驾驶中,急转弯不仅会给车辆带来很大的磨损,而且很有可能会造成翻车等交通事故; 因此本文选取“速度80-120 km/h时间占比(%)”、“速度>120 km/h时间占比(%)”、“100 km平均急变速次数”、“100 km平均急转弯次数”作为驾驶行为特征参数.
设置聚类类别为4,采用FCM聚类分析,得到聚类中心如表2所示. 由表2可知,类别1无明显超速倾向,急变速急转弯次数较小,此类驾驶行为发生交通事故风险最小; 类别2无明显超速倾向,急变速急转弯次数较大; 类别3有一定的超速倾向,急变速急转弯次数较小; 类别4超速倾向严重,急变速急转弯次数较大,此类驾驶行为风险较高,发生交通事故的风险很大,驾驶员应该受到交通运输企业或管理部门的重点监控.
基于FCM聚类结果,根据本文所提出的自动挑选BP神经网络训练样本的方法挑选典型样本. 设计BP神经网络,将典型样本的驾驶行为特征数据归一化作为BP神经网络的输入,典型样本的类别数值作为BP神经网络的输出. BP网络最大训练次数为5000,目标误差为0.001. 利用BP网络进行学习,可以得到对驾驶行为进行实时分类的BP神经网络分类器. 待分类的驾驶行为特征数据为[1.33 0.35 1.45 0.66],将待分类驾驶行为特征数据归一化后作为BP神经网络分类器的输入,输出为1.09,即认为此驾驶行为特征数据属于类别1.
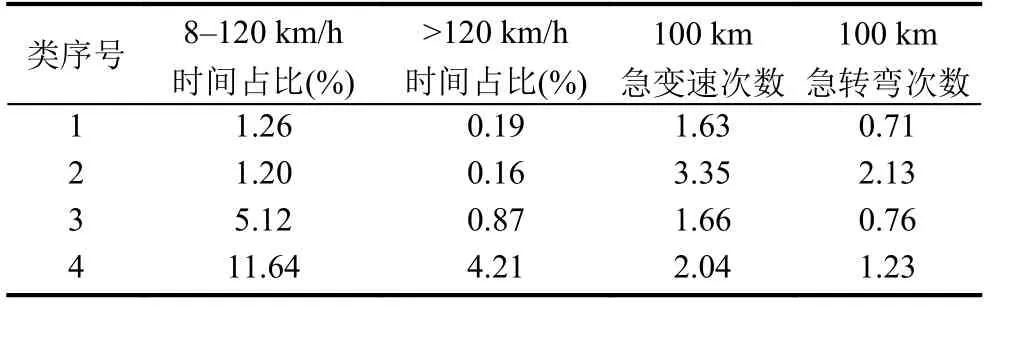
表2 FCM聚类得到的4个类别的聚类中心
3 结论
本文根据车辆监控平台获取的车联网数据,提取并量化了驾驶行为特征的参数指标,采用模糊聚类方法对驾驶行为特征数据进行聚类,基于FCM聚类结果,为了提高BP神经网络分类精度,提出了一种自动挑选训练样本即典型样本的方法,利用BP网络进行学习,最终用训练得到的BP神经网络分类器对驾驶行为进行实时分类. 本文通过驾驶行为安全等级分类,挖掘出驾驶行为习惯,建立了车联网数据、驾驶行为特征、道路安全三者的关联机理,为交通管理部门重点监控较高风险驾驶人提供了参考依据,为UBI(Usage Based Insurance)驾驶行为评价提供一种新的方法.
1鲁光泉,宋阳. 车路协同环境下驾驶行为特性与交通安全综述. 交通信息与安全,2014,32(5): 13-19.
2陶瑞华,魏恒. 机动车道的非直接左转交通措施对驾驶员行驶特性和安全的影响. 交通运输系统工程与信息,2009,9(3): 55-63.
3牛增良,李海斌,王文峰,等. 基于聚类分析的营运驾驶人危险驾驶行为研究. 山东交通学院学报,2014,22(1):19-23.
4钱宇彬,刘浩学,吴长水,等. 夜间长途客车驾驶员操作行为差异性识别研究. 中国安全科学学报,2014,24(3): 9-15.
5庄明科,白海峰,谢晓非. 驾驶人员风险驾驶行为分析及相关因素研究. 北京大学学报(自然科学版),2008,44(3):475-482.
6孙伟,张为公,张小瑞,等. 疲劳驾驶检测方法的研究进展.汽车技术,2009,(2): 1-5,17.
7任慧君,许涛,李响. 利用车载GPS轨迹数据实现公交车驾驶安全性分析. 武汉大学学报(信息科学版),2014,39(6): 739-744.
8白云,石京. 北京市驾驶行为与影响因素分析. 交通信息与安全,2010,28(2): 114-119.
9Tseng CM. Operating styles,working time and daily driving distance in relation to a taxi driver’s speeding offenses in Taiwan. Accident Analysis & Prevention,2013,52: 1-8.
10Herrera JC,Work DB,Herring R,et al. Evaluation of traffic data obtained via GPS-enabled mobile phones: The mobile century field experiment. Transportation Research Part C:Emerging Technologies,2010,18(4): 568-583. [doi: 10.1016/j.trc.2009.10.006]
11Greaves SP,Ellison AB. Personality,risk aversion and speeding: An empirical investigation. Accident Analysis &Prevention,2011,43(5): 1828-1836.
12彭江琴,刘南杰,赵海涛,等. 智能UBI系统研究. 计算机技术与发展,2016,26(1): 142-146.
13Bezdek JC. Pattern Recognition with Fuzzy Objective Function Algorithms. New York: Plenum Press,1981.
14张慧哲,王坚. 基于初始聚类中心选取的改进FCM聚类算法. 计算机科学,2009,36(6): 206-209.
15熊桢,郑兰芬,童庆禧. 分层神经网络分类算法. 测绘学报,2000,29(3): 229-234.
