飞行模拟技术在红外/微波复合导引头测试中的研究与应用*
2018-04-18李士刚
姚 勤,刘 雪,李士刚
(1.驻上海地区航天系统军事代表室·上海·201109;2.上海新跃联汇电子科技有限公司·上海·200233)
0 引 言
随着科技水平的发展,导引头研究也进入了一个新的发展阶段,飞行模拟系统作为导引头技术发展的产物,在导引头研制的各个阶段都发挥着重要的作用。采用飞行模拟技术,在系统设计阶段可以更准确地评估导引头的设计性能;在研制阶段可以辅助调试部件及系统,大大缩短系统的研制时间;在交付使用阶段不仅可以作为导引头检测评估的手段,同时还为应用方熟悉导引头的使用方法提供了环境[1]。
本文阐述了一种导引头飞行模拟测试系统的研究与应用,测试系统采用三轴转台+二维目标的方式,形成新的五轴系统。三轴转台是导引头进行飞行仿真的重要平台,包含有3个旋转轴,可以通过旋转达到互相正交的状态,构成一个空间正交的三维坐标系,用来模拟导弹的飞行空间。3个旋转轴连带着3个旋转框架,将导引头安装在转台内框架上,就构成了一个三维导弹仿真平台,可以对导弹的空气动力特性、姿态运动以及跟踪特性等进行实时仿真与测试。经过通信线路将获取的数据传送到计算机进行数据处理,即可获得所需的性能参数,从而为导弹的研发工作提供支持。红外/微波复合目标源产生导引头在测试和试验过程中所需的红外/微波目标,由二轴目标运动模拟装置带动目标源,形成满足导引头测试要求的目标视场及目标运动特性,模拟空间目标的位置、角速度等信息。
1 测试系统总体设计
1.1 飞行模拟技术和硬件设计的融合
主控系统主要由总控计算机及接口设备组成[2]。总控计算机是主要的人机交互界面,实验人员在此设备上对整个系统进行操作,主要完成仿真试验参数设置、弹道参数装订、试验进程控制等功能。
弹体姿态模拟系统由三轴转台、控制柜及接口设备等组成。控制柜主要负责接收主控系统指令,生成驱动指令,驱动三轴转台按照指令进行转台动作,完成导引头的姿态模拟。
目标模拟系统由运动模拟装置、微波发生器、喇叭天线、红外目标源组成,可以模拟导引头目标的视线角速度,微波发生器和喇叭天线按指令生成不同特性的微波目标;红外目标源生成指定特性的红外目标。图1所示为测试系统组成框图。1.1.1 创新型的五轴系统设计
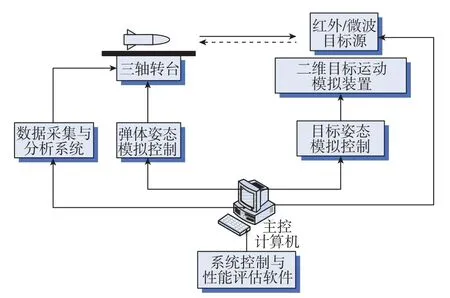
图1 测试系统组成图Fig.1 Test system composition diagram
以往的五轴测试系统均采用五轴转台模式,即将二维目标系统作为三轴转台的一部分,共同实现五轴运动。这样做的缺点在于频繁的五轴联动对转台框架要求较高,同时暗室环境空间较小,目标源与被测导引头距离较近,对点目标源的安装精度和能量精度有极高的要求;很多采用五轴转台方式的测试系统,因点光源无法达到指标要求而导致测试效果不佳。本系统创新性地采用三轴转台+二维目标的方式,形成新的五轴测试系统,不仅对点光源的安装精度及能量要求有所降低,工程上更易实现,且该系统的微波暗室空间达到25m×10m×10m,实现了目标平面任意轨迹精准平稳模拟、旋转弹体导弹飞行姿态同步模拟。通过表1可知,整个系统最终运动姿态共包含7个要素。在导引头测试过程中,操作人员输入动作参数,7个运动姿态按照解算指令进行动作。根据位置关系定义转台中心距目标运动平面的垂直距离。已知量:

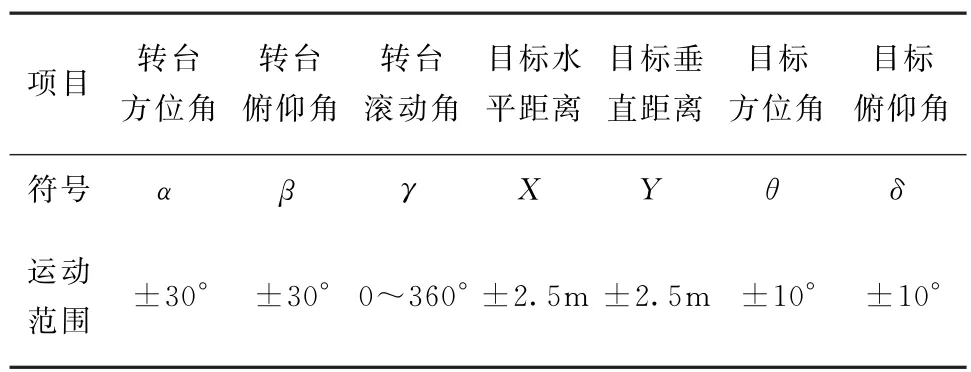
表1 系统运动及符号定义Tab.1 System movement and symbol definition
计算量:
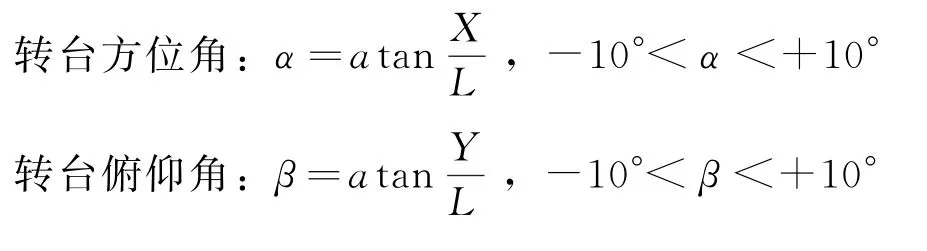
以转台方位、俯仰为参考进行解算,已知量:

计算量:
圆周运动结算方程,已知转台的运动速度指令如下:


则按照转台处于零点,可求得:

最终求得目标水平和直线运动位移和速度方程如下:
目标水平速度:

目标垂直速度:

按照一个完成周期,即T=10s,上述方程曲线绘制如图2所示。
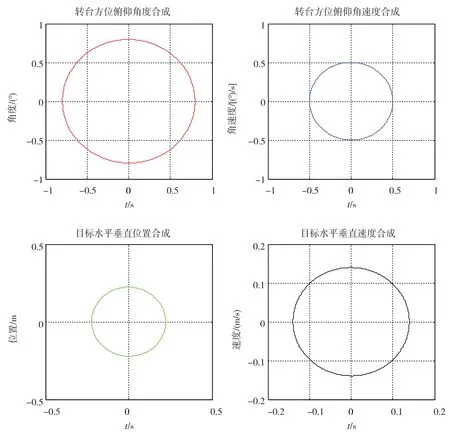
图2 一个周期复合运动转台与目标的轨迹曲线Fig.2 Track curve of a periodic composite motion turntable and target
1.1.2 转台与目标的分体式同步联动设计
基于新的五轴系统,三轴转台和二维目标运动模拟装置为同源控制,对系统提出了如下的同步联动精度要求:
1)联动实现水平和垂直方向0.1(°)/s~5(°)/s的跟踪角速度,跟踪角速度误差小于1%;
2)联动实现被测产品随目标按预定轨迹、预定速度进行运动。
同步及联动性的精度主要由以下几方面保证:
1)实时的传输网络
转台和目标系统之间采用实时通信接口,应用VMIC光纤通信反射内存板。VMIC反射内存是基于环状/星状的高速复制的共享内存网络。它实际上是作为双端内存来工作的。本地主机对它的反射内存地址空间进行写操作,该地址空间是本地内存的一个端口。VMIC 5565反射内存板自动地将这个新的数据从它的另一个端口传出去,这个端口是连接在环状体系结构的网络上的光纤,工作速率为2.1G波特率。网络中的下一个VMIC 5565反射内存板接收到这个新的数据,其本地内存将在400ns之内被更新。采用网络实时的控制方式,主控计算机起数据中转的作用,根据约定好的通信协议,将控制参数发送到弹体姿态控制计算机和目标控制计算机上,并将下位机上传的实时数据传给主控计算机。
2)控制系统设计
本系统提出了三轴转台+二维目标的五轴系统架构、加速-匀速-减速分区段自适应驱动算法,解决了转台与目标分体式同步联动的难题,实现了目标平面内任意轨迹精准平稳模拟、旋转弹体导弹飞行姿态同步模拟。
转台控制系统设计包括速度环和位置环的双环控制结构设计。首先,在对系统性能指标进行分析时,根据系统的性能指标和外环对内环的设计要求,从外环到内环逐步确定各环的性能指标要求;然后,在设计系统各环控制器时,从内环开始,根据系统对每一环的性能要求和环路固有特性,设计各个环路的控制器。首先设计速度环,然后设计位置环。为了简化位置环的设计,在设计位置环时,将速度环闭环传递函数简化为惯性环节;最后根据位置反馈设计结果设计位置环控制器。
目标运动模拟装置控制系统主要是交流伺服控制系统,是一种利用人工智能、控制工程、结构学等领域的理论成果,有效模拟目标实时运动功能的机电装置,它是目标模拟装置的大脑,从根本上决定了整个系统性能的好坏。其运动方程包括快速定位、线性插补和圆弧插补三大部分。快速定位是指运动机构快速地定位到某一位置,需要设置X轴或Y轴目标运行的终点位置和运行速度2个参数。线性插补是使X、Y轴同时以某一个速度向直角坐标系中设定的点运行,这时需要设置X、Y轴运行的终点坐标和运行的速度。圆弧插补可以使X、Y轴绕着标淮圆周做匀速圆周运动,程序中需要设置圆周运动的线速度、圆弧中心和圆弧半径,只要任何一个设置不满足圆周运动条件,系统将不会运行回初始状态。
1.1.3 二维目标模拟装置的精准平稳传动设计
二维复合目标运动模拟装置的设计难点在于安装空间为8.3m×8.3m,运动范围为5m×5m,在5m×5m的运动范围内需实现平面直线运动、空间圆周运动,运动模式包含加速运动、匀速运动和减速运动,速度最高可达1.5m/s,加速度最高可达3m/s2,定位精度需满足±5mm的要求,对二维目标的定位精度、稳定度、平稳度、安装搬运装配都有极高的要求。传统的传动方案一般采用滚珠丝杠、普通的皮带传动,均无法达到该要求。经过多方论证,采用进口直线模组,同时通过PLC数字化控制算法,实现了复合目标最大行程8m、定位精度在±0.1mm之内的多种模式的平稳运动。试验结果表明,采用该传动系统,经过高负荷长时间的运行考验,二维复合目标运动模拟装置工作稳定,定位精度高,运动平稳。
1.1.4 陀螺指向测试的转台偏角修正算法
被测导引头属于同轴安装式导引头,即将红外光学接收器作为陀螺转子的一部分直接固定在陀螺转子上,利用陀螺的定轴性实现导引头的框架稳定,利用其进动性实现对目标的跟踪[5]。在进行陀螺指向测试时,将导引头安装在转台上,给转台设置水平偏角,给导引头产品装定高低角指令。若陀螺中心与转台回转中心重合,则导引头内陀螺伺服系统能够带动光学元件精确对准目标。测试系统在测试导引头过程中,当导引头的陀螺中心与转台回转中心不重合时,基于导引头陀螺指向测试的转台偏角修正算法,推导得出转台偏角、二维复合目标垂直偏角、测试暗室空间长度、导引头回转中心偏离距离以及偏转角度之间的空间对应关系,实时解算出转台需设置的偏转角度,准确控制陀螺伺服系统带动光学系统精确指向目标,确保了导引头对目标角位置信息的测试精度,提高了导引头的调试测试效率。
在进行陀螺指向测试时,首先将转台水平偏角设置为-α°,给导引头产品发送高低角-α°指令,此时导引头内位标器陀螺绕其中心点偏转-α°,若陀螺中心与转台回转中心同在O点,则导引头内陀螺系统理论上能够带动光学元件精确对准目标。当陀螺中心与O点不重合,延长至D点时 (如图3左图所示),如何设置转台角度,使得陀螺中心能以-α°的角度精确指向目标 (如图3右图所示),即图中Φ角为所求。
图3 陀螺指向测试原理示意图Fig.3 Schematic diagram of gyro pointing test principle
导引头内位标器陀螺中心、目标源和转台回转中心之间的空间对应关系如图4所示。
1)O为转台回转中心,D为导引头陀螺中心点,2个中心点不重合,其距离长为r;
2)因导引头在转台上存在安装误差,初始对光时目标源的位置由g点移动到g'点;
3)OS为转台初始位置,其延长线为目标源中心点g,转台旋转角度c后其位置为OS',OSg S'在同一个平面内;
4)OD为导引头弹轴初始位置,其延长线为对光后目标源位置g',导引头随转台旋转后其位置为OD',∠DOD'定义为a,ODg D'在同一个平面内;
5)转台旋转后,导引头弹轴与目标源g'之间的夹角为Φ,此角度为导引头的方位角度;
6)导引头弹轴OD与转台平面OSgS'的水平夹角为h,垂直夹角为v,OD在转台平面的投影为OC,∠COC'为b,转台旋转角度c=b,c是要求出的转台偏转角度。
图4 陀螺指向测试位置关系图Fig.4 Position diagram of gyro pointing to test
将本测试系统应用于微波暗室内,Og'长为L,其长度S通过激光测距即可获得。OD=OD',长为r,即导引头陀螺中心偏离转台回转中心的距离。将△DOD'在转台平面内做投影得到△COC',在△DOD'中,从O点做DD'边的垂线OE,因△DOD'为等腰三角形,得出DE=ED',延E点做CC'边的垂线EF,可以证明CF=FC'。
在△Og'D'中,根据正弦定理得出:

因△OCC'是△ODD'的投影,所以L1与L2相等:
得出转台偏角b与导引头弹轴偏角a、导引头光轴垂直角v之间的关系:

将式 (1)代入式 (4)中可得式 (5)
利用该算法将修正角度写入转台偏角程序中,实时解算出转台需设置的偏转角度,准确控制陀螺伺服系统带动光学系统精确指向目标。
1.1.5 小 结
通过以上几种技术的应用,成功地将飞行模拟技术融合在硬件设计中,使系统能够模拟弹体姿态平面和圆周的精准平稳运动,真实模拟了红外和微波复合目标的运动轨迹以及导弹与目标的真实态势,实现了导引头动态条件下的性能测试。
1.2 软件设计
1.2.1 数据信号采集程序
在导引头性能测试及调试中,需要对导引头输出信号进行采集,因此数据采集是测试软件编程的重要部分。本系统主要是对模拟信号进行采集,在程序前面板点击数据采集按钮,此时事件程序中队列被压入Cont AI信息后进入数据采集子程序,将采集的原始信号值与标定参数做处理,即可显示信号值。
1.2.2 空间/水平对称性测试程序
空间/水平对称性测试是导引头复合性能测试中的一个关键的测试项目,主要考核导引头输出信号的空间及水平的对称特性,是极为重要的考核指标。测试项目分为水平对称性测试和空间对称性测试。KK大小和KK相位的计算方式为:首先定义导引头输出Udy=Asin(ωt+B),其中,A为要求的KK大小,B为要求的KK相位,ω为弹旋频率。软件同时采集导引头输出的Udy信号以及转台基准信号Uz, 以转台基准信号Uz为周期,首先定义4个物理量,分别为Kk_x和Kk_y,KK[i]大小和KK[i]相位。其在一个周期内的计算公式如下:
通过Kk_x和Kk_y可以计算出一个周期内的K K[i]大小和K K[i]相位。
采集22s的数据,截取前半段和后半段各6s的数据,求取其平均值后得到KK大小和KK相位。

1.2.3 FFT计算程序
傅立叶变换方法作为经典的信号分析方法,在数字信号处理领域得到了广泛的应用。在信号处理过程中,频域分析往往比时域分析方便和高效[6]。在对导引头进行大小相位调试时,需要同时观测导引头信号在110 Hz和118Hz这2个频率上的幅值信息,通过调节导引头参数将这2个频率分量调到最小。程序首先将信号进行拼接处理,当采集信号时间小于设定时长时,即将几次采集数据拼接在一起进行数据处理,在程序前面板可以设定一次FFT时长,然后利用Lab VIEW的FFT子程序即可对信号进行频域分析。其程序实现如图5所示。
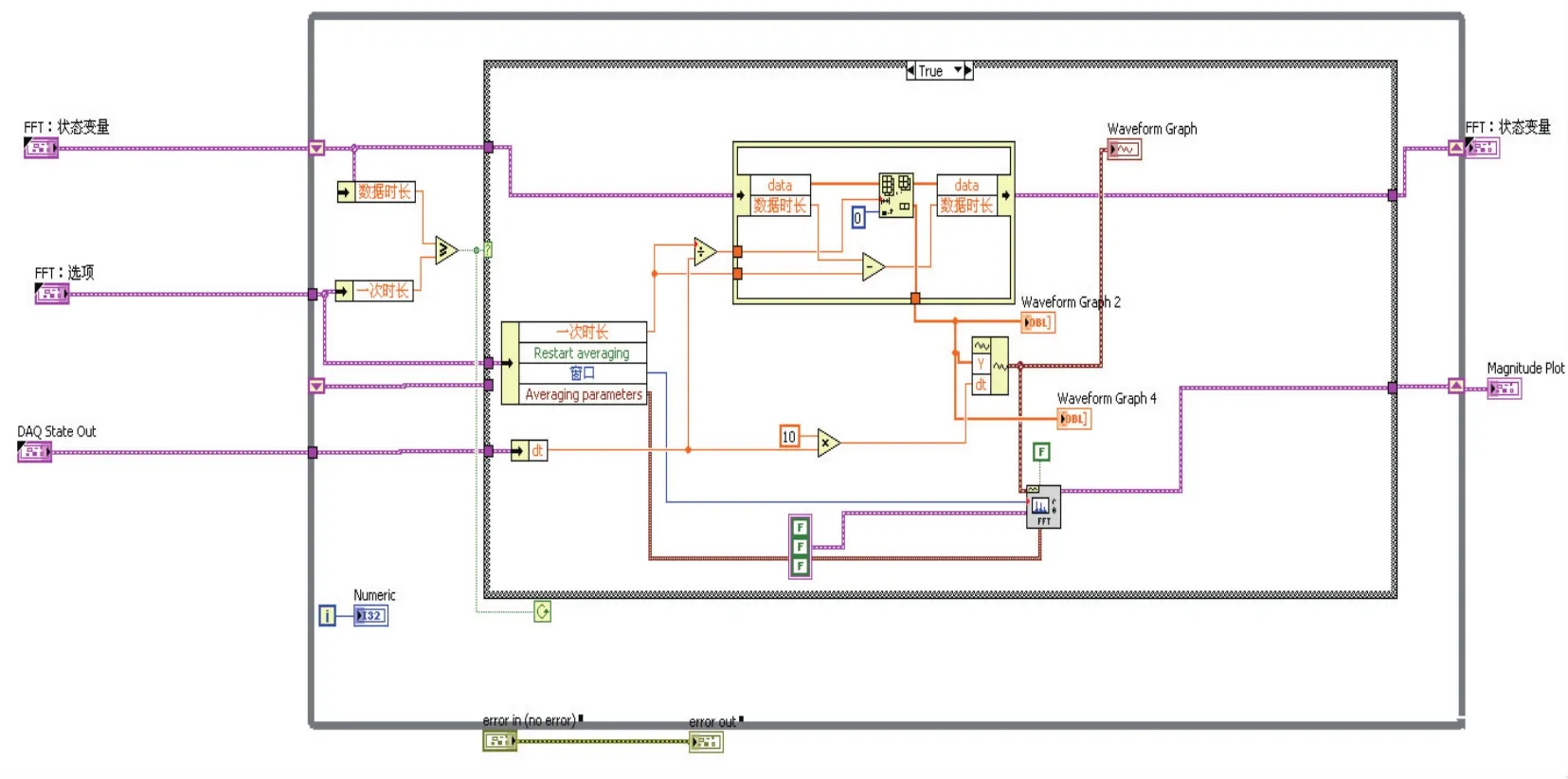
图5 FFT计算程序Fig.5 FFT calculator
2 测试结果分析
2.1 三轴转台测试结果
转台系统主要技术指标完成情况如表2所示。

表2 转台系统主要技术指标完成情况Tab.2 Completion of key technical indicators of the turntable system
2.2 二维目标测试结果
二维目标系统主要技术指标完成情况如表3所示。
3 结 论
本文研究了微波暗室环境下的导引头飞行模拟测试技术,构建了导引头全自动化测试系统,通过主控系统、转台系统和二维目标模拟系统三大分系统的联合应用,实现了目标平面内任意轨迹精准平稳模拟、旋转弹体导弹飞行姿态同步模拟,保证了导引头在动态条件下的测试性能,且测试精准,效率高。