开关电源拓扑在飞轮控制系统中的应用综述*
2018-04-18徐敬勃谭学谦姜宁翔
徐敬勃,谭学谦,姜宁翔,吴 珍
(上海航天控制技术研究所 上海惯性工程技术研究中心·上海·201109)
0 引 言
太阳电池阵-蓄电池组电源系统是目前应用最为广泛的航天器电源系统,在全世界已发射的至少4000种航天器中,其应用占比达到90%以上。卫星在轨运行时,在光照区间,太阳电池阵给负载供电,同时给蓄电池组充电;在阴影区间,蓄电池组提供负载功率。
随着空间电源技术的发展,不同电源、不同功率调节方式下的电源母线电压差异较大。国内卫星电源系统通用规范提出的电源母线电压范围为26~100V,对于大多数负载功率小于2k W的电源电压,母线电压一般为26~42V;对于负载功率大于2k W的电源系统,母线电压一般大于50V[1]。在额定负载下,频率小于10MHz时,电源母线电压纹波峰峰值一般小于600m V。
1 飞轮电源系统现状
飞轮及控制力矩陀螺作为卫星姿控系统中的重要执行部件,在机动状态下,其运行功率往往达到100W甚至200W以上。由于其内部电机的存在,偏置动量轮在6000r/min高转速时,电机母线端反电势往往达到32V以上。对于低轨卫星或是在卫星处于阴影区间的非全调节模式下,卫星电源系统提供给飞轮的母线电压往往低于28V,此状态下由于卫星电源母线电压低于飞轮内部电机反电势,造成飞轮高转速下力矩无法足额输出,甚至无法加速到偏置转速,其应用受到了极大的限制。
以往的飞轮为了克服卫星电源母线电压过低而无法工作的问题,解决方法是减小电机力矩系数,使其普遍低于0.04(N·m)/A;同时增大飞轮电机电流,使得电机电流大于2.5A,以此实现飞轮高转速下达到额定输出力矩的目的。但是由于飞轮摩擦损耗力矩与转速正相关,无法避免高转速下输出力矩的衰减,而过高的电机电流对控制电路中晶体管的性能提出了极高的要求。飞轮在高转速制动下产生的大量热耗将降低功率器件的使用寿命。
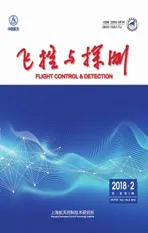
目前,国内外各厂家生产的偏置动量轮多数采用半桥驱动的无刷直流电机的控制形式[2-4],通过调整电机母线电压对飞轮内部电机各绕组上的电机电流进行闭环控制,电机母线输出端电压则直接来自于卫星电源系统的输出电压,其结构如图1所示。反作用飞轮多数采用全桥驱动的无刷直流电机的控制形式,其电机电流控制方式可通过调整电机母线电压的形式实现,其结构如图2所示,也可通过将PWM波直接加载到各换相MOS管上实现,其本质上仍相当于对电机母线电压进行调整。
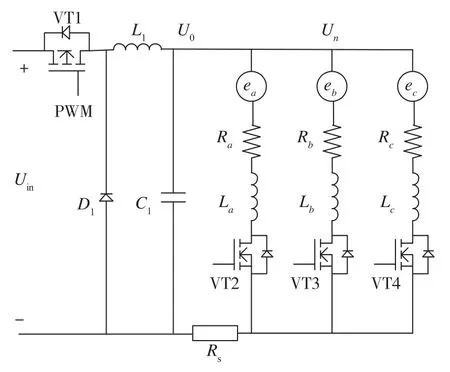
图1 半桥驱动的飞轮电机母线控制方式Fig.1 Control mode of half-bridge driving in flywheel motor line
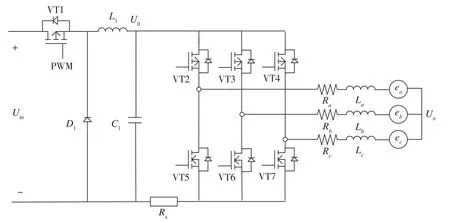
图2 全桥驱动的飞轮电机母线控制方式Fig.2 Control mode of full-bridge driving in flywheel motor line
图1及图2中的飞轮电机母线电压调整方式实际为开关电源中的Buck拓扑,以卫星电源系统的输出电压为输入Uin,以电机电流控制环路中串接的采样电阻Rs上的电流信号作为反馈。通过运算处理,产生占空比变化的PWM信号控制开关管VT1的通断,进而调整输出电压U0的大小,使其能够跟踪电机反电势的变化,进而实现对电机电流的闭环控制。
输出电压U0=D×Uin,其中,D为PWM波的占空比,Uin为卫星电源系统的输出电压,也就是飞轮的一次电源输入电压。
由于D<1,因此Buck拓扑是一个降压调整器,U0<Uin。
当飞轮转速达到6000r/min甚至更高转速时,电机反电势ea、eb、ec往往会达到32V以上,此时对于卫星电源低于32V的低轨卫星,星上一次电源电压已经无法满足飞轮的使用需求。
2 非隔离型拓扑的应用
为解决卫星电源电压过低及Buck拓扑只能降压无法升压的问题,考虑在飞轮电机母线调整模块中引入升压环节。
常见的非隔离型升压拓扑包括Boost拓扑、Buck/Boost拓扑、Boost-Buck拓扑 (Cuk拓扑)[4-5]、Zita拓扑、Sepic拓扑[6],也可将Boost拓扑和Buck拓扑直接级联,先对电机母线电压进行升压,再引入电机电流闭环,对调整后的母线电压进行Buck调节。
Boost变换器属于升压变换器,其输出电压高于输入电压。飞轮在运行时,存在加速、稳速、制动等工况,在加速过程中,飞轮电机反电势与转速成正比,由0升到最高反电势,这也要求飞轮电机母线电源调整模块的输出电压具有由0逐渐增大的调整功能。因此,无法直接使用Boost拓扑,往往采用与Buck拓扑或其他拓扑级联的形式。Zita拓扑和Sepic拓扑较为复杂,且实际应用很少,这里对其不做讨论。
2.1 Boost拓扑与Buck拓扑级联
Boost拓扑具有升压功能,适用于对卫星电源系统输出的一次电源电压进行升压,设定将22~42V的输入电压升压至45V,供后级Buck拓扑使用。Buck拓扑具有降压功能,通过电机电流环路中的采样电阻上的电机电流信号,对其进行PWM闭环控制,跟踪电机反电势的变化,使得飞轮能够在一个固定的电机电流闭环控制下,输出相应的飞轮力矩。仅以飞轮半桥驱动电路对其进行分析,其结构图如图3所示。
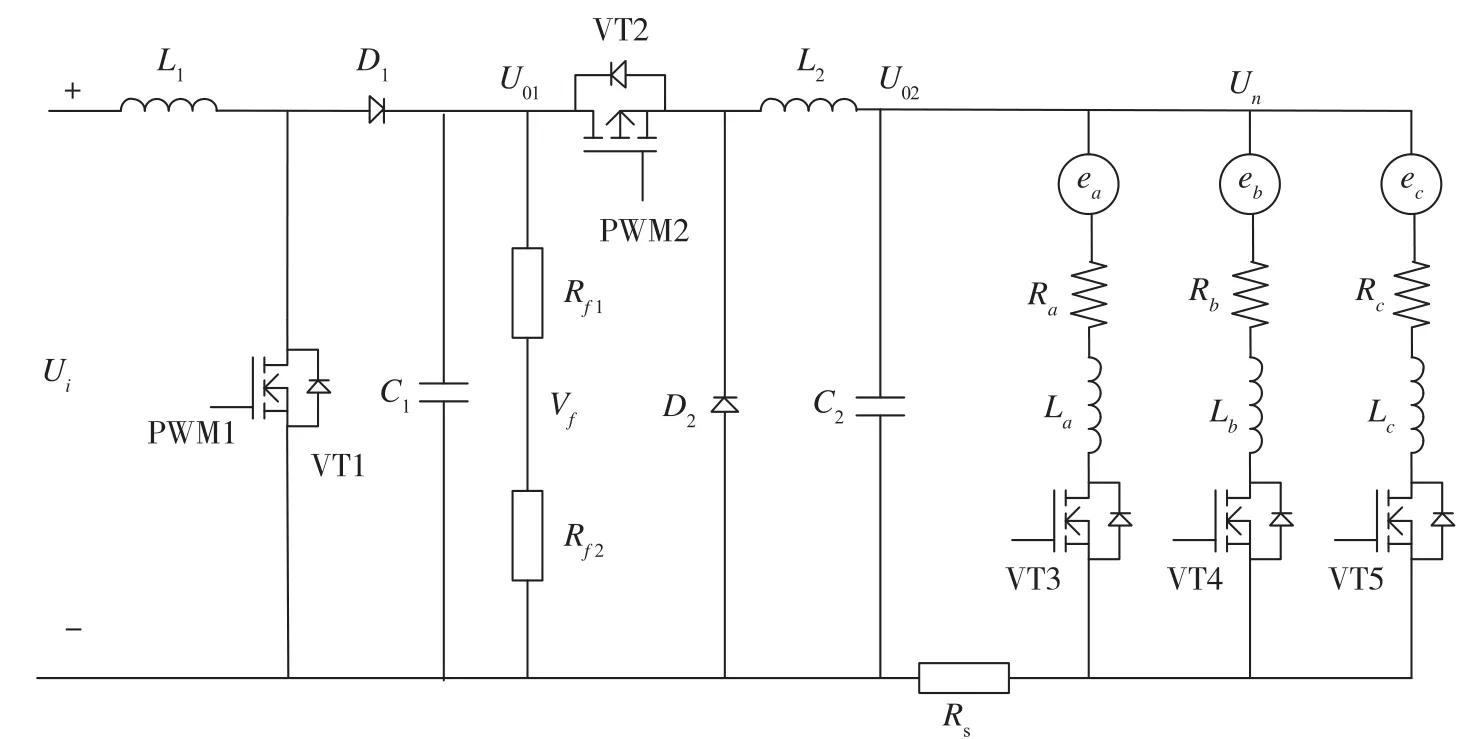
图3 Boost和Buck级联的飞轮半桥驱动控制方式Fig.3 Control mode of half-bridge driving in flywheel with boost and Buck cascaded Boost
该拓扑以Rf1、Rf2间的分压Vf作为电压反馈信号发送给PWM控制环节,控制PWM1的占空比,将22~42V范围内的一次电源输入电压Ui升压至45V的输出电压U01。在电感L1电流连续的情况下,输出电压U01为

其中,D1为Boost变换器中PWM1信号的占空比。
Buck拓扑以采样电阻Rs上的电流信号作为反馈信号发送给PWM控制环节,控制PWM2的占空比,对45V的U01信号进行调制,使得输出电压U02跟踪飞轮电机反电势的变化,进而维持飞轮在特定力矩指令下的加速运行。
输出电压U02为

其中,D2为Buck变换器中PWM2信号的占空比。
输出电压纹波ΔU0为[5]

通过增加滤波电感、开关频率及滤波电容,可以降低输出电压的纹波。
Boost、Buck拓扑直接级联的控制形式优点是结构简单,两种拓扑直接级联,分别控制,由于不需要隔离,能量转换效率很容易达到90%以上。缺点是:母线上的2个开关管VT1、VT2分别采用2路不同的PWM控制,需要2个控制芯片,为了改善系统EMI特性,减少拍频干扰,简化飞轮输入滤波电路,2路PWM波最好设置为同步;后级需要2个储能电感L1、L2,2个续流二极管D1、D2,2个滤波电容C1、C2,所需器件体积均比较大,采用PCB布板时,占用面积较大。
2.2 Buck/Boost拓扑
Buck/Boost拓扑,实际上是一种非隔离型反激变换器,其存在反极性输出和正极性输出两种结构,其结构如图4、图5所示。
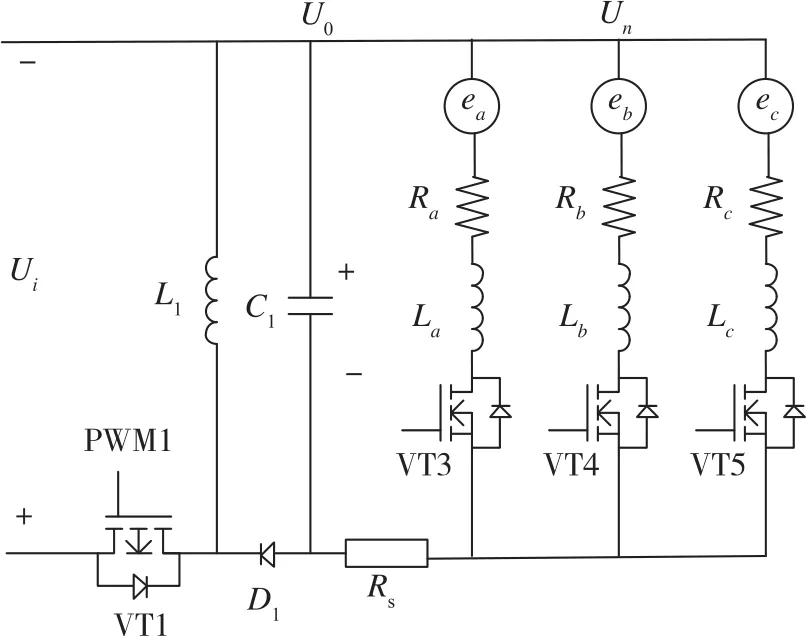
图4 反极性输出Buck/Boost拓扑的飞轮半桥驱动控制Fig.4 Control mode of half-bridge in flywheel with Buck/Boost on inverse polarity
在电感电流连续时,Buck/Boost变换器的输出电压U0为
其中,D为Buck/Boost拓扑中PWM1和PWM2信号的占空比。

通过增加滤波电感、开关频率及滤波电容,可以降低输出电压的纹波。
以电机电流环路中采样电阻Rs上测得的电机电流信号作为闭环反馈信号,对开关管VT1、VT2进行PWM控制,使得输出电压U0跟踪飞轮电机反电势的变化,进而维持飞轮在特定力矩指令下的加速运行。
整流二极管D1、D2可采用同步整流,进一步提高电源功率转换效率。
正极性的Buck/Boost拓扑与反极性的Buck/Boost拓扑相比,虽然增加了一个开关管VT2和一个整流二极管D2,但可保证飞轮母线端电压与输入电压的同极性,降低了反向电压对器件的冲击,同时开关管VT1、VT2及整流二极管D1、D2上承受的峰值电压更小,有利于提高开关管的可靠性。
Buck/Boost拓扑结构不仅可以解决飞轮一次电源电压不足的问题,还可以在抑制无刷直流电机转矩脉动方面[7-9]及飞轮储能方面[10]得到应用;但其缺点是输入电流和输出电流脉动值较大,这对后级飞轮电机电流的闭环控制提出了较高的闭环精度及响应速度的要求。
图5所示的正极性输出Buck/Boost拓扑中,开关管VT1和VT2同时导通,同时截止,PWM1和PWM2的占空比均为D。
输出电压U0根据占空比的大小,可大于输入电压Ui,也可小于输入电压Ui,因此,其对一次电源电压的变化适用范围更宽。
输出电压纹波ΔU0为[5]
2.3 Cuk拓扑

其中,D为Cuk拓扑中PWM信号的占空比。
输出电压U0根据占空比的大小,可大于输入电压Ui,也可小于输入电压Ui,因此,该拓扑同样适用于一次电源电压较低或变化范围较大的飞轮应用场合。
输出电压纹波ΔU0为[5]
Cuk变换器又叫Boost-Buck串联变换器,其同样具有升压、降压功能,且输出电压与输入电压的极性相反,其结构如图6所示。
在电感电流连续时,输出电压U0为
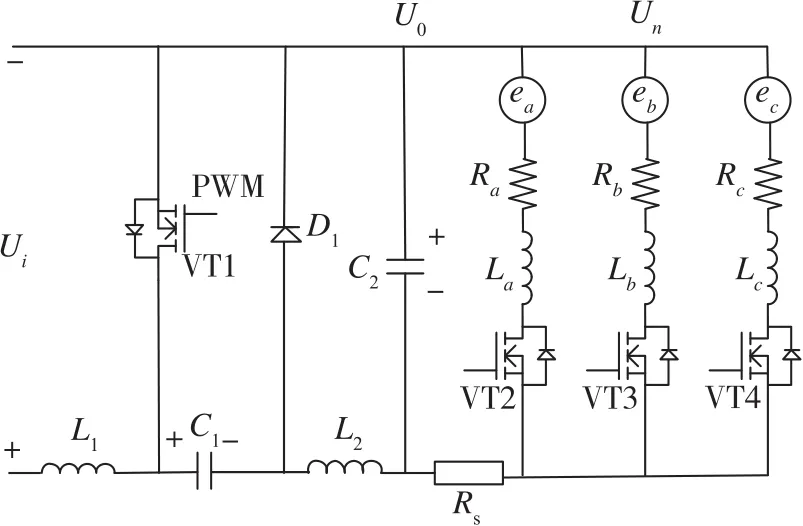
图6 反极性输出Cuk拓扑的飞轮半桥驱动控制方式Fig.6 Control mode of half-bridge driving in flywheel with Cuk on inverse polarity

通过增加滤波电感、开关频率及滤波电容,可以降低输出电压的纹波。
在实际应用时,为了减小开关管的开关损耗,开关频率fs不可能太大,一般fs<100k Hz,往往通过增大电感量及增加电容量的方法减小输出电压纹波。将输入储能电感L1和输出储能电感L2绕制在同一个磁芯上,使其具有耦合效应,同时使得各自的等效电感量增大,可以使得输出电压的纹波变得更小,同时由于只用了一个磁芯,电感的体积也更小,有利于产品的小型化。输出电压纹波的减小,有利于后级飞轮电机电流控制回路的精确闭环控制。
Cuk拓扑的优点是输入及输出电流的脉动均较小,缺点是实际应用时参数设置较为复杂。
Cuk拓扑在无刷直流电机转矩脉动[11]、空调电机控制[12-13]方面已经有了实际应用案例。
3 隔离型拓扑的应用
对于一些高轨卫星,要求其各系统单机内部一次电源及二次电源应物理隔离,隔离阻抗一般要求大于1MΩ。国外的电源模块厂商如IR公司、Interpoint公司、VPT公司、Alcatel公司,国内的中电43所、771所均有相应的DC-DC模块,且大多数内部一次地、二次地均采用磁耦或光耦隔离的方案,但这些电源模块大多数功率较小,且均不具备大功率升压功能。针对飞轮对大功率升压模块的特殊应用需求,具备磁隔离方案的升压技术也越来越受到关注。
隔离型拓扑主要包括正激式拓扑 (单端、双端)、反激式拓扑、推挽拓扑、半桥拓扑、全桥拓扑[4]以及更复杂的半桥谐振拓扑、LLC谐振拓扑[5]等,在这里限于篇幅原因不做具体介绍,仅对应用思路做一定介绍。
隔离型拓扑基本上是从非隔离型拓扑中的Buck、Boost、Buck-Boost拓扑演化而来,因此,其在飞轮控制系统中的应用与上述的非隔离型拓扑的应用类似。由于采用了隔离型变压器,其输入、输出实现了电气隔离,反馈信号通过磁耦或光耦的方案实现。
由于隔离型变换器的初级、次级隔离,因而可将电路中为各芯片供电的小功率DC-DC变压器集成到次级中,实现变换器次级的多路输出,由此有效地减小了产品体积。
在实际使用时,可将隔离型变换器直接串接在飞轮电机母线前端,以飞轮电流回路中采样电阻Rs上的电流信号作为反馈,并对反馈信号进行隔离,实现对变换器的闭环控制。也可在飞轮电路中通用的Buck调整器前端串接隔离变换器,结合Buck调整器的快速响应特性及隔离型变换器的升压及多路输出特性,实现系统控制电路的优化。
隔离型变换器在飞轮控制系统中的应用思路如图7和图8所示。
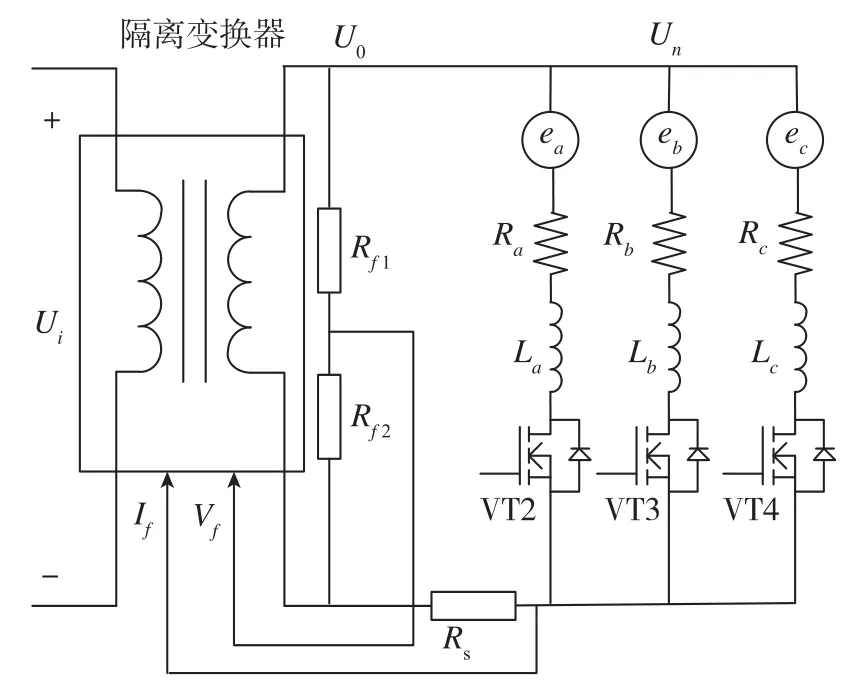
图7 隔离型变换器直接控制方式Fig.7 Straight control mode of isolated converter
在隔离型变换器直接控制方式下,以飞轮电机电流回路中的采样电阻Rs上的电流反馈信号If作为反馈控制信号,为使输出空载电压不至于太高,以输出电压采样信号Vf作为输出限幅反馈信号,对隔离变换器初级进行PWM控制,达到对飞轮电机电流进行闭环控制的目的。
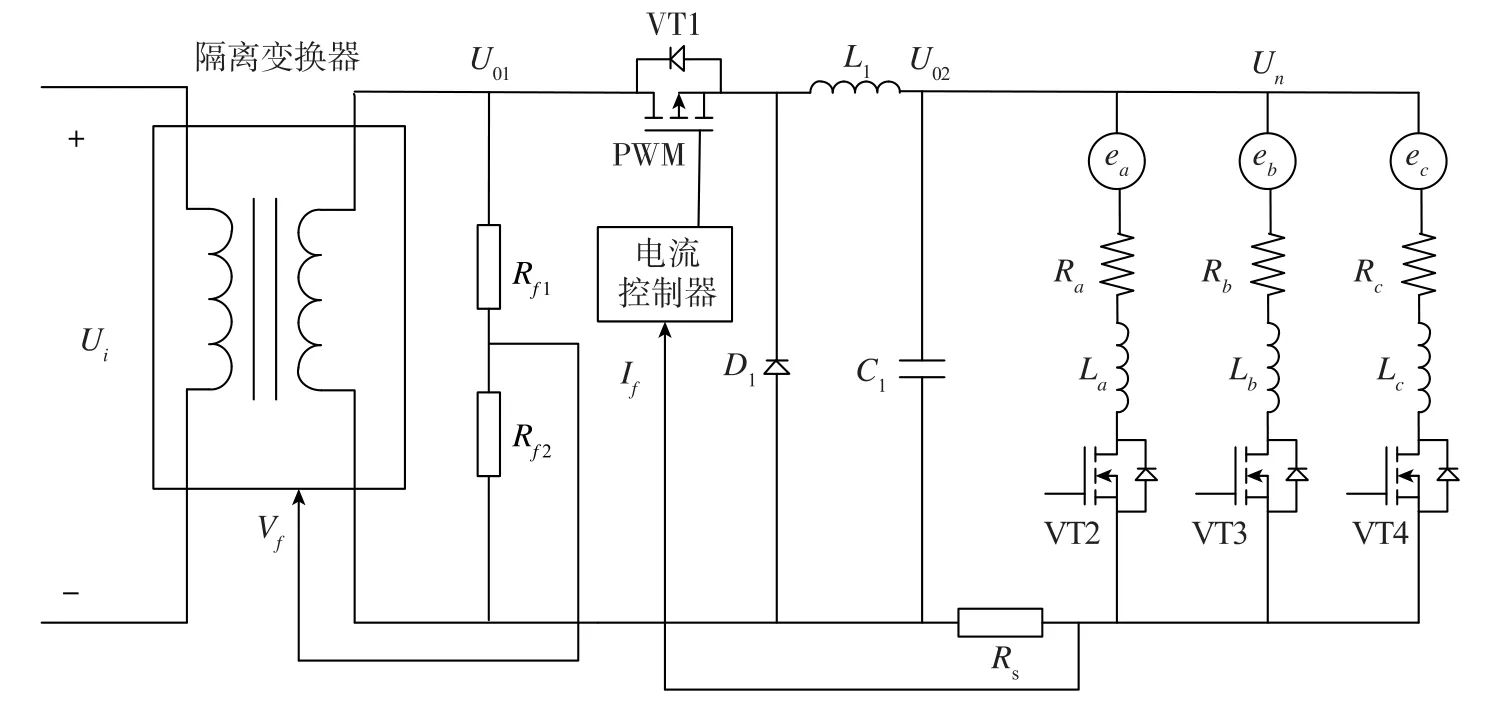
图8 隔离型变换器级联Buck变换器的控制方式Fig.8 Control mode of isolated converter cascade Buck converter
在隔离型变换器级联Buck变换器的控制方式下,隔离变换器以输出电压U01的采样信号Vf作为反馈信号对隔离变换器初级进行PWM控制,隔离变换器处于电压闭环、电流开环的工作方式下,U01恒定输出一个稳定的电压给后级飞轮控制电路,同时隔离变换器可实现多路输出,将±12V二次电源集成到一个变换器中。后级串联Buck变换器,以飞轮电机电流回路中的采样电阻Rs上的电流反馈信号If作为反馈控制信号,达到对飞轮电机电流进行闭环控制的目的。
隔离型变换器的输出电压及电流特性[6]如下所示:
(1)正激变换器 (Forward Converter)
输出电压特性

脉动电流特性

(2)反激变换器 (Flyback Converter)
输出电压特性

脉动电流特性

(3)推挽变换器 (Push-Pull Converter)
输出电压特性

脉动电流特性

(4)半桥变换器 (Half-Bridge Converter)
输出电压特性

脉动电流特性

(5)全桥变换器 (Full-Bridge Converter)
输出电压特性

脉动电流特性

式 (8)~式 (17)中,Lf为滤波电感值,Ns为二次匝数,Np为一次匝数,Lp为一次绕组电感值,D为PWM信号的占空比,Ts为开关周期。
通过式 (8)~式 (17)可以看出,在设定隔离变换器匝比Ns/Np的情况下,减小开关周期Ts或增大滤波电感Lf或Lp的值,都可以达到减小电流脉动的目的,但电感值太大会造成飞轮闭环控制响应变慢;为了提高变换器的转换效率,往往希望开关周期Ts越大越好,这又与减小电流脉动的目的相违背,开关周期Ts一般设定在100 k Hz以内。因此,实际应用时,各参数应根据具体负载特性进行设计。
4 结束语
随着控制理论的发展、材料及工艺的不断进步,适用于飞轮控制系统的变换器模块发展越来越成熟,也为飞轮等空间执行机构控制系统的设计提供了更多的选择。本文提出的几种非隔离型及隔离型的开关电源拓扑均有各自的优缺点,为未来飞轮控制系统的设计提供了实际性的应用思路。