基于P型迭代学习的pH值中和过程控制
2018-04-13卜祥强赵瑞丽张妤
卜祥强 赵瑞丽 张妤
摘要:在pH值中和过程中,由于溶液的酸碱度对产品的质量以及环境有着很大的影响,pH值控制最为重要,因为pH值对溶液的物理,化学性质都有影响,对其进行控制有很大的意义,因此必须对pH值进行控制。在pH值中和过程的离散化模型的基础上,分析了pH值中和过程的非线性特点,结合迭代学习控制理论,给出P型的具有学习能力的迭代学习智能控制方法,可实现在时间区间上的完全跟踪任务。仿真结果表明,当迭代次数趋于无穷时,P型迭代学习控制方法可以实现对期望值的完全跟踪,验证了该方法的有效性。
关键词:非线性;迭代学习控制方法;pH值控制;离散化模型;重复性
中图分类号:TP393
文献标识码:A
1 引言
pH值中和过程存在于许多现代化工业中,如制药、发酵、造纸、电镀、废水处理及给水处理等,对其进行控制有很大的意义。因为pH值对溶液的物理、化学性质都有很大的影响,从而导致环境污染以及产品质量的改变,因此必须对溶液的pH值进行控制,所以对pH值控制最为重要[1-2]。在pH值控制过程中,因为pH值与控制量之间的强非线性关系,所以很难实现对pH值的检测和控制,而且效果都不理想。实际运用中,pH值中和过程呈现出严重的非线性和pH响应的时滞性,还有进水pH值不确定动态变化,使得许多在理论上成熟的控制策略在实际应用中遭到严峻的考验[3-4]。加之反应大多发生在容器和循环管路中,使得系统存在较大时滞,给pH值控制不仅带来极大困难,而且浪费大量的中和剂。为此pH值被公认为最难的控制变量之—。
传统的PID控制适合于线性定常连续系统,但是这种参数不确定性的系统其控制很难实现,而且参数整定非常困难。随着现代控制理论的发展,对pH值的控制已经给出了一些有效控制方法。如Wiener模型的辨识与预测控制,自适应控制,模糊控制和神经网络控制等等。但它们在实际pH值控制中的应用均存在一定的困难,为此pH值控制方法的研究一直都是非常具有挑战性的研究课题[5]。
pH值中和过程中的pH值控制是一个批处理的过程,具有重复性的特点。针对重复过程的迭代学习控制(Iterative Learning Control,简称ILO是一种具有学习能力的智能控制方法,可实现在时间区间上的完全跟踪任务。它的思想是由日本学者Uchiyama最先提出的。虽然ILC在理论上不断进行发展和完善,ILC方法也己在实际工程中得到了广泛的应用,但传统的ILC方法仍面临着很多问题[6]。
这里,在pH值中和过程的离散化模型的基础上,结合迭代学习控制理论,给出P型的迭代学习控制方法,并将其运用到pH值中和过程中。最后通过仿真进行验证。
2 pH值中和过程的模型
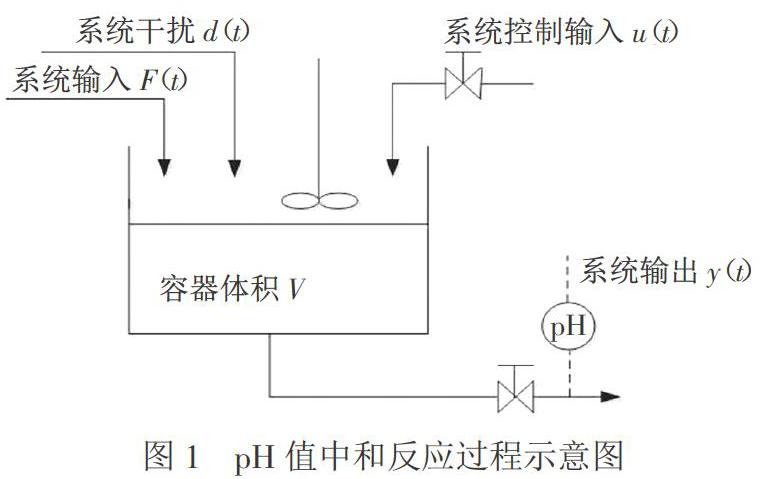
pH值是pH值中和过程中对溶液酸碱度的衡量标准。中和反应过程是将酸溶液、碱溶液和缓冲剂混合在一个固定体积的容器中,酸碱中和反应过程的描述如图l所示[7-8]。
其中,酸的流速F(t),碱的流速u(t)以及为系统的输入,流出溶液的pH值y(t)为系统的输出。作出以下假设:假设酸的流速F(t)和容器体积V固定不变;假设不可测得的缓冲剂流速d(t)为系统扰动[9]。
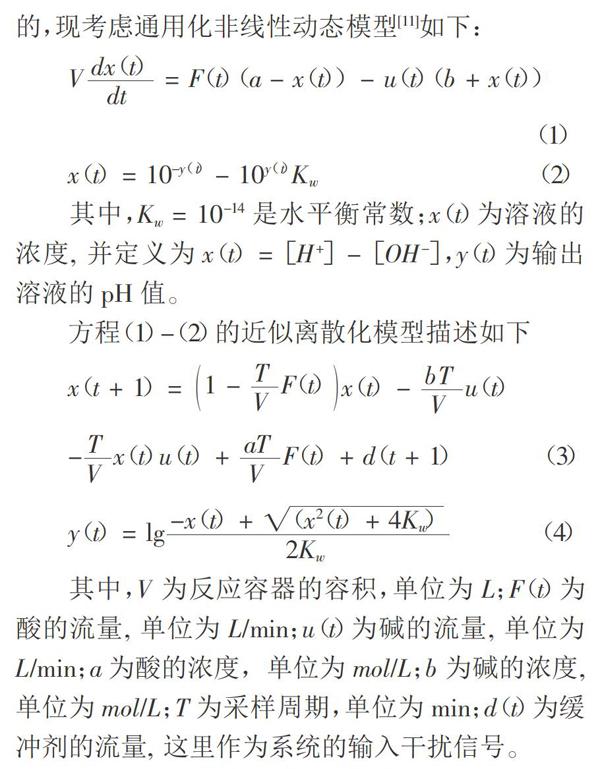
实际生产过程中的中和反应过程是非常復杂的,现考虑通用化非线性动态模型[11]如下:
其中,V为反应容器的容积,单位为L;F(t)为酸的流量,单位为//min;u(t)为碱的流量,单位为//min;α为酸的浓度,单位为mol/L;b为碱的浓度,单位为mol/L;T为采样周期,单位为min;d(t)为缓冲剂的流量,这里作为系统的输入干扰信号。
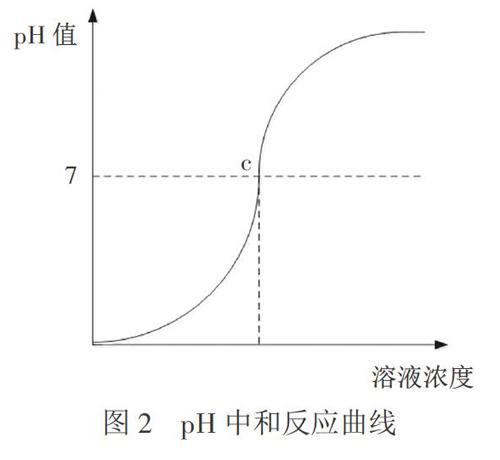
pH中和过程的pH值曲线是一个非线性的变化过程,其描述如图2所示。在pH值的变化过程中,pH值较低或较高时,它的变化非常缓慢,而在接近中性时,即pH值在7左右时,pH值的变化比较敏感,图中c点所示。又由于中和过程一般在大容器中进行,从中和剂加入到pH值变化需要较长的时间,导致中和过程具有严重的非线性与时滞性,给pH值的控制带来极大的困难。
针对上述产生的问题,本文给出了P型的迭代学习控制方法来实现对pH值的有效控制,控制效果通过仿真进行了验证。
3 P型迭代学习控制
迭代学习控制是指通过不停重复一个同样的轨迹的控制尝试,并以此对控制律进行修正,从而达到很好的控制效果。迭代学习控制是通过运用先前得到的信息来得到我们期望输出轨迹的控制输入,从而提高控制质量。迭代学习控制是一种以迭代来产生优化的输入信号,从而使系统输出尽可能接近理想值的算法,而不依赖于动态系统的精确数学模型。迭代学习控制常常适用于具有重复运动性质的被控系统,它的能够实现有线区间上的完全跟踪任务的目标。迭代学习控制通过对被控系统进行控制尝试,通过控制输出信号与给定目标的偏差对不理想的控制信号进行修正,以提高系统的跟踪性能。很多控制方法是从线性受控对象起步,而迭代学习控制直接将非线性系统作为主要研究对象,并且要在有限区间[0,T]上实现输出完全追踪的控制任务[10-12]。考虑重复运行的动态系统如下:
图4、图5分别为pH值为7时,第200次迭代和第400次迭代时pH值的跟踪效果。其中实线表示期望的pH值,虚线为实际的pH值曲线。图6为pH值的最大跟踪误差。从图中可知,当期望pH值为常数时,随着迭代次数的增加,该方法逐渐实现了对期望值的完全跟踪,即当迭代次数趋于无穷时,实际pH值一致收敛到期望值。
在第50个采样点时,将pH设定值由6变为8,并对其进行仿真,仿真结果如图7-9所示。从图中可以看出,当期望值发生变化时,随着迭代次数的增大,最大跟踪误差逐渐减小,一致收敛为零,即当迭代次数趋于无穷时,仍能实现对期望值的完全跟踪。
5 结论
本文以pH值中和反应的通用化动态模型为基础,研究了基于P型迭代学习控制方法的pH值中和过程中的控制问题。仿真结果表明,当迭代次数趋于无穷时,P型迭代学习控制方法可以实现对期望值的完全跟踪,验证了该方法的有效性。
参考文献
[1]郭红霞,刘磊.pH值控制方法的研究[J].价值工程,2012,6:283-284.
[2]马新迎,施华锋,苏成利,等.模糊Hamrnerstein模型预测控制及其在pH过程中的应用.计算机与应用化学,2013,30 (10):1122-1127
[3]邵惠鹤.工业过程高级控制[M].上海:上海交通大学出版社,1997:40-41.
[4] 马海芳,朱凌云,王富强.基于Wiener模型的pH中和过程非线性DMC控制啪.化工自动化及仪表,2010,37 (9):33-36.
[5]MEZ J C C,JUTAN A,BAEYENS E.Wiener model identifica-tion and predictive control of a pH neutralisation process [J].IEEE Proc-Control Theory Appl, 2004, 151 (3): 329-338.
[6]朱騰,王京春,熊智华.基于改进DE-NM PC的酸碱中和反应pH值控制[J].自动化学报,2010,36(1):159-163.
[7] HENSON M,SEBORC D.Adaptive nonlinear control of a pHneutralization process [J]. IEEE Trans Control Syst Technol,1994;2 (3):169-182.
[8]周景振,韩曾晋.具有时滞的pH值中和过程模糊自适应控制[J].控制与决策,1998,13 (5):527-531.
[9] SEBORG D E.Fuzzymodeling of nonlinear pH processesthrough neural approach [J].IEEE on Systems,1994,(2):1224- 1229.
[10]谢仕宏.酸碱中和过程pH值的Fuzzy- PID控制[J].计算机测量与控制,2010,18 (9):2088-2090.
[11]杨照华,杨智,王慧中.两种新型pH值的控制方法研究[J].甘肃工业大学学报,2001,27 (3):51-54.
[12] LEE J-H,LEE I-Y,KIM M-K,et al.Optimal pH control ofbatch processes for production of curdlan by Agrohacteriumspecies [J]. Joumal of Industrial Microbiology&Biotechnology,1999,23:143-148.
[13] WANG Zi-dong,HO DANIEL W C,LIU Xiao-hui.A Note on theRohust Stahility of Uncertain Stochastic Fuzzy Systems WithTime- Delays EJl. IEEE Transactions on Systems, Man&cy-hemetics: Part A,2004, 34 (4): 570-576.
[14]孙明轩,黄宝健.迭代学习控制[M].北京:国防工业出版社,1999.
[15]李卓悦.任意初值下的非线性系统的模糊迭代学习控制算法研究[D].兰州理工大学,2015.
[16]韩伟,马邕文,万金泉,等.基于云模型在废水处理pH控制过程中的仿真研究[J].计算机仿真,2015,32 (5):432-435
[17]曹荣敏,侯忠生.pH值中和反应过程的无模型学习自适应控制[J].计算机工程与应用,2006,42 (28):191-194.
