基于自适应遗传算法的Pl控制在MPPT中的应用研究
2018-04-13龚波周永华
龚波 周永华


摘要:光伏阵列是将太阳能转化为电能的组合装置,是光伏发电系统中的核心部分。最大限度利用光伏阵列的输出能量是光伏发电技术所考虑的重要问题之一。根据硅太阳电池的电气特性,建立了硅太阳电池的等效数学模型,介绍了传统电导增量法实现最大功率点跟踪(MPPT)的基本原理,并针对该方法电压扰动步长的不足,提出了一种基于自适应遗传算法的数字PI控制变步长跟踪方法,通过Matlab/simulink进行S函数建模和仿真,实现了光伏阵列最大功率点(MPP)的跟踪。仿真结果表明,该控制方法能够快速准确的跟踪最大功率点,使系统具有良好的动态性能和稳定性能。
关键词:光伏阵列;MPPT;自适应遗传算法;PI控制;S函数
中图分类号:TP18
文献标识码:A
1 引言
随着生态环境的恶化和化石燃料的日渐枯竭,清洁可再生能源的利用变得尤其重要,光伏发电便是其中最具代表的应用。在光伏发电技术中,为了提高光伏阵列输出能量的利用率,如何快速准确地跟踪最大功率工作点是所要考虑的重要问题之一。最大功率点跟踪(MPPT)系统是一种能保持光伏阵列输出功率始终处于最大值的实时控制系统。在实际运用中,主要的MPPT控制方法有定电压跟踪法[1-2]、短路电流比例系数法[3]、扰动观察法[4-5]、电导增量法[6]和模糊控制[7-9]等。传统电导增量法,实现起来相对复杂,其电压扰动步长的选取也比较讲究:步长太大,导致系统跟踪误差较大,输出扰动较为明显;步长太小,则系统跟踪速度较慢,由此而导致过多的能量损失。本文所提出的方法是一种基于传统电导增量法的改进型控制方法,主要采用自适应遗传算法设计数字PI控制器,变步长扰动开关器件IGBT的通断时间,能够快速准确地跟踪光伏阵列的最大功率点,具有良好的动态性能和稳定性能。
2 硅太阳电池数学模型
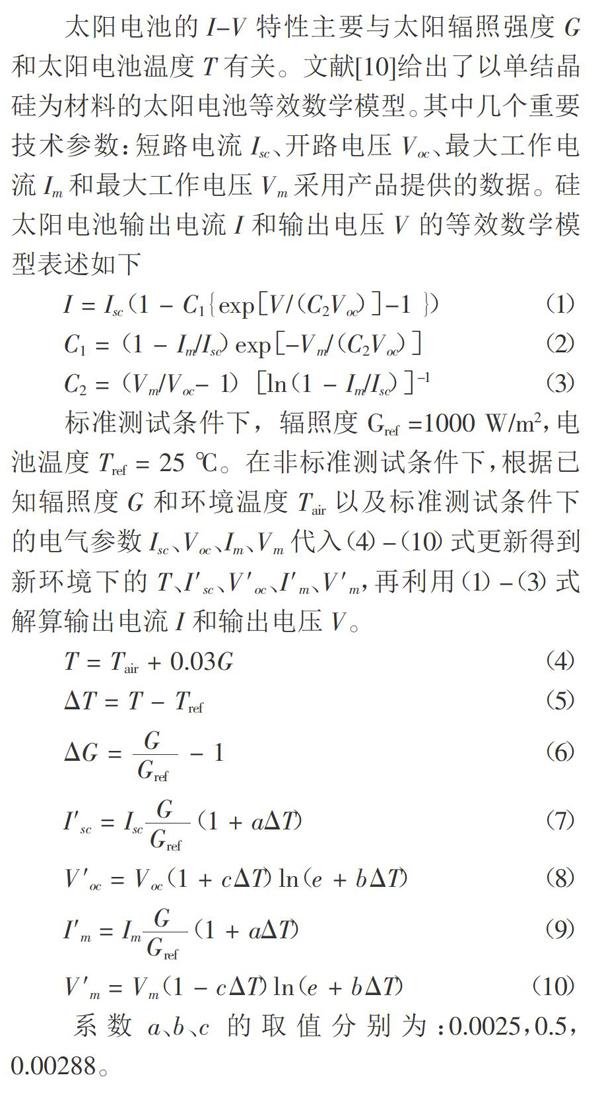
太阳电池的I-V特性主要与太阳辐照强度G和太阳电池温度T有关。文献[10]给出了以单结晶硅为材料的太阳电池等效数学模型。其中几个重要技术参数:短路电流Isc、开路电压Voc、最大工作电流Im和最大工作电压Vm采用产品提供的数据。硅太阳电池输出电流,和输出电压V的等效数学模型表述如下
3 最大功率点跟蹤方法
3.1 电导增量法的基本原理
电导增量法主要是通过扰动光伏阵列的输出电压来实现最大功率点的跟踪,文献[6]对此有较为详尽的说明。当dV =0,d,≠0时,说明辐照强度发生变化:如果dI>0,表明辐照强度增加,输出功率变大,应正向扰动输出电压;如果dI<0,表明辐照强度减少,输出功率变小,应反向扰动输出电压;否则,光伏阵列工作在MPP。当dV≠0时,则比较电导的变化量和电导的负值。当光伏阵列工作在MPP左侧时,电导的变化量大于电导的负值,应正向扰动输出电压;若电导的变化量小于电导的负值,则光伏阵列工作在MPP右侧,应反向扰动输出电压;否则,光伏阵列工作在MPP。
3.2 电导增量法的改进
分析电导增量法的控制目标,实际上是通过扰动输出电压实现电导的变化量等于电导的负值或者满足条件dV=dI=0。根据光伏阵列的P-D关系曲线(如图1所示)可知,电导增量法对系统输出电压的扰动,可以转化为对系统控制电路占空比的扰动,最大功率点也将在某一适当的占空比处达到。文献[11,12]讨论了采用数字PID控制方法实现占空比的扰动。在本文中,采用Boost电路作为MPPT的控制电路,通过自适应遗传算法设计数字PI控制器实现占空比的扰动。
设第k时刻的扰动步长为△D (k),则该时刻的占空比D (k)为第k-l时刻的占空比△D (k-D和△D(k)之和。其中,△D(k)通过增量式数字PI控制算法获得。图2所示为改进的电导增量法控制流程图。
4 控制器设计
4.1 算法设计
由于最大功率点的跟踪是在占空比的基础上进行的,控制器只需要获得合适的占空比增量即可计算出当前时刻应输出的占空比,因此采用增量式数字PI控制算法。控制器的输入为电导的变化量和电导的负值之间的偏差信号,输出为占空比。
增量式数字PI控制算法为
4.2 跟踪步长灵敏度控制
由电导增量法的工作原理可知,在最大功率点附近时,电导的变化量和电导的负值之间的偏差量接近于零。为保证MPPT系统的跟踪精度,设定一灵敏度系数A= θ|e(k)| (θ可自由取值),在e(k)|≤1时,AD (k)的实际取值为λ倍D(k)的计算值,使最大功率点附近的跟踪步长随系统的跟踪情况而自适应变化。
5 自适应遗传算法的应用
遗传算法是计算数学中一种用于解决最优化问题的随机化启发式搜索算法,但标准遗传算法的最大缺点是对新空间的探索能力有限,容易收敛到局部最优解[13]。本文将采用合作型协同进化的自适应遗传算法来解决数字PI控制算法中KP和KI的取值问题。
(1)编码和初始化。变速积分数字PI控制算式中两个待优化的参数分别为KP和KI,根据经验以及参数的物理意义,确定它们的取值范围分别为(0,5)和(0,2)。为便于进行大空间搜索,以提高解的精度和收敛速度,因此采用实数编码的方式并随机生成规模为50的初始群体作为迭代优化的初始解。
(2)计算适应度。适应度为遗传算法迭代过程中的群体进化和最优解的选择提供了依据。本文选择适应度函数J= 1/F, F为系统误差绝对值与控制器输出的平方项之和的时间积分。
(3)选择。按照适应度的大小比例来确定个体进入下一代的概率。若当前代最佳个体的适应度大于下一代群体中最佳个体的适应度,则复制当前代的多个最佳个体随机替代下一代群体中相应数量的最差个体。
(4)交叉和变异。交叉概率pc过大容易破坏优质个体,过小又使算法搜索过程缓慢;变异概率pm过小不利于保持种群多样性,阻碍算法的全局搜索能力,过大则随机性太强,不易收敛[13]。因此,适当减小pc和pm有利于保护适应度较高的优质个体直接进入下一代;而采用较大的pc和pm淘汰掉适应度较小的个体[14]。此外,在种群进化初期,多样性程度较高,适合采用较小的pc和较大的pm以避免优质个体遭到破坏且有利于扩大搜索空间;在进化后期,适合采用较大的pc和较小的pm有利于在最佳区域进行搜索,提高了解的收敛速度和精度。
本文对同一初始种群分别引入两种不同的交叉变异机制,并采用各代最优解的最优解作为问题解。机制一采用交叉变异概率一,并对交叉变异个体分别进行算术交叉和浮点数均匀变异;机制二采用交叉变异概率二,进化采用单模分布交叉算子和柯西变异。
交叉变异概率一:
(5)第(4)步完成后,在两种运行机制下将会分别产生一个最佳个体,比较得出两个个体中的最优个体并存入集合A中,在未达终止进化代数前,将生成的新种群再次按照(2)一(4)进行迭代。迭代结束,比较得出A中的最优个体,送入数字PI控制器,运算结束(流程如图3所示)。
6 MPPT仿真设计和结果分析
运用上述硅太阳电池数学模型和控制算法,在Matlab/Simulink环境下,分别对天合光能有限公司的TSM-DD14A(II)型光伏组件和数字PI控制器编写S函数并建立如图4所示的MPPT仿真模型。仿真用光伏组件在标准测试条件下主要参数为:Isc=9.88 A,Voc=47.3 V,Im=9.35 A, Vm=39.1 V,Pm=365 W。仿真模型主要参数为:CO=100μF,Cl=380 μF,L=16 mH,R=15 Ω。
根据TSM-DD14A( II)的产品手册,为仿真分析方便,设置光伏组件的环境温度在0.05 s时由一5℃(等效于电池温度25℃)突变为20℃,辐照强度由1000 W/m2突变为800 W/m2。仿真曲线(输出电压、输出电流和输出功率)与仿真结果如图5和表l(相对误差为仿真实验值和手册参考值之间的相对误差)所示。在环境温度不变而辐照强度突变时,该仿真设计的跟踪情况如图6所示:设置环境温度為25℃,辐照强度在0.05 s时由800 W/m2突变为700 W/m2。
由以上仿真波形可以看出,经过很短的时间后光伏组件的输出电压、输出电流和输出功率稳定在最大功率点附近,而且在辐照强度和环境温度产生突变时能够快速准确地跟踪到新的最大功率点,输出曲线平滑,几乎没有波动。此外,光伏组件的最大功率工作点受环境因素影响较大,尤其受辐照强度影响最为明显。本文是基于自适应遗传算法来设计的数字PI控制器,其仿真结果与给定数值之间存在少量偏差(相对误差5%以内),在最大功率点跟踪的初始阶段均有不同程度的尖峰振荡,这主要与仿真模型的电气参数和控制算法有关,通过优化算法和改善模型的电气参数可以得到改善。
综上,本文针对电导增量法扰动步长的局限性,在此基础上提出了基于自适应遗传算法的数字PI控制算法,在Matlab/Simulink环境下进行仿真分析,验证了所提方法的合理性和有效性。仿真结果表明,该模型可以模拟不同环境条件下的光伏阵列工作情况,所提出的算法能够实现最大功率点的跟踪,且具有良好的动态性能和稳定性能。
参考文献
[1]戴志威,舒杰,吴昌宏.基于环境参数模型的定电压MPPT控制算法研究[J].电力电子技术,2015,49 (5):61-63.
[2]许洁,刘星桥.基于恒电压跟踪法和自适应占空比扰动法的最大功率点跟踪研究[J].电测与仪表,2016,53 (9):7-12,29.
[3]齐洁莹,周明,史文秀,等.基于分区域控制法的MPPT研究与仿真D].黑龙江电力,2016,38 (6):529-532,536.
[4] 荣德生,刘凤.改进型扰动观察法在光伏MPPT中的研究[J].电力系统及其自动化学报,2017,29 (3):104-109.
[5] CHEN Kai, TIAN Shu-lin, CHENG Yu-hua,et al.A Si-ngle-Phase Single-Stage Grid-Connected Photovolt-aic (PV System[J].China Academic Journal Elect -ronic Publishing House,2015:728-734.
[6]汤济泽,王丛岭,房学法.一种基于电导增量法的MPPT实现策略[J].电力电子术,2011,45 (4):73-75.
[7] 万庆祝,张翊帆.基于模糊控制与自适应步长相结合的光伏发电系统最大功率点跟踪研究[J].电气工程学报,2017,l2(3):33-40.
[8]李宏玉,落文斌,吕金淼.基于改进的模糊控制在MPPT系统中的应用[J].自动化与仪器仪表,2017 (3):162-164,168.
[9] YAO Zhi-qing, ZHANG Qian, LIU Xi-mei. Applicationof aFuzzy Self-tuning Pl Controller in a Grid -C -onnected PVGeneration SvstemECl//.lnternational Conference on ICCE2011,AISC 112. Germany:2011:823-834.
[10]苏建徽,余世杰,赵为,等.硅太阳电池工程用数学模型[J].太阳能学报,2001,22 (4).409-412.
[11]孟蕾,钟宁帆.一种数字PID控制的扰动观察法光伏电池MPPT仿真[J].科研发展,2012:77-79.
[12]吴茂.基于数字PID控制的光伏MPPT研究[J].中国教育技术装备,2012 (9):98-100.
[13]韩瑞锋.遗传算法原理与应用实例[M].北京:兵器工业出版社,2010:330-333.
[14]黄友锐,曲立国.PID控制器参数整定与实现[M].北京:科学出版社,2010:28-35.
