7R机械臂的研制及用于实践教学的探索
2018-04-11张庆东丁洪生李春阳
付 铁, 张庆东, 丁洪生, 李春阳
(北京理工大学 机械与车辆学院,北京 100081)
0 引 言
随着计算机技术、自动化技术、机电一体化技术、电子技术、传感技术以及人工智能技术等现代学科的发展,机器人技术得到了迅速发展和深入广泛应用,机器人技术现已成为衡量一个国家工业自动化水平的重要标志[1-2]。近年来,随着工信部《关于推进工业机器人产业发展的指导意见》政策的出台,以及“中国制造2025” “国家创新驱动发展”和“新工科”等新战略和新概念的出现和崛起[3-8],制造业成为我国经济“创新驱动、转型升级”的主战场,机器人也将作为未来10年十大重点发展领域之一。这种新形势与背景改变了未来社会对机器人技术人才的需求,从而使得机器人教育教学备受关注[9-14],有不少院校都设置了机器人专业。通常,应用型大学注重技能培养,而研究型大学侧重学术研究。然而,当前新形势下的机器人教育则更加注重实践、更加注重知识与能力的融合、更加注重综合素质及创新能力的培养。因此,文中以自行研制的7R教学机械臂为研究对象,就机器人技术人才培养方面进行教学探索与研究。
1 7R机械臂的机械结构及工作原理
如图1所示,7R机械臂是一种具有7个回转自由度的冗余关节式机器人[15],它具有方位关节J1、大臂俯仰关节J2、大臂自旋关节J3、小臂俯仰关节J4、小臂自旋关节J5、手腕俯仰关节J6和手腕自旋关节J7共7个关节。每个关节均为转动副,且具有相应的驱动装置,工作时带动末端执行器达到不同的位置和姿态,并由其完成相应的动作,如抓放、装配等操作。多自由度的冗余结构能够提高机械臂的灵活性,改善其运动性能,使其能够完成避障等特殊任务要求。

图17R机械臂的机械本体结构
关节结构及传动原理是机器人教学的主要内容之一。以小臂俯仰关节J4为例,其机械结构及传动原理如图2所示。关节J4由一体化减速电机(通常采用高速伺服电机+行星减速器)作为动力源。由于行星减速器有回程间隙,会影响关节的传动精度以及整个机械臂的动态特性,因此,一体化减速电机通过联轴器将运动和力矩通过连接轴传入谐波减速器(理论上无侧隙,传动精度高),然后通过谐波减速器的输出实现小臂的俯仰运动。同时,采用位置传感器作为转角反馈元件,实现整个关节的闭环控制,进一步提高关节的传动精度。其他6个关节的结构设计思路与J4关节基本一致,限于篇幅,这里不在赘述。

图2 J4关节的机械结构及传动原理示意图
2 7R机械臂的控制系统
7R机械臂的控制系统是基于CAN总线的上位机与DSP关节控制器的两级控制架构,如图3所示。上位机主要用于7R机械臂的运动学求解,然后将各关节的控制指令下发到各自的关节DSP控制器。DSP关节控制器用于输出控制信号给电机驱动器,从而控制关节电机提供动力输出。位置传感器采用旋转变压器,用于实时测量关节角度,并反馈到关节控制器完成闭环控制。上、下位机之间通过CAN总线进行数据交换。
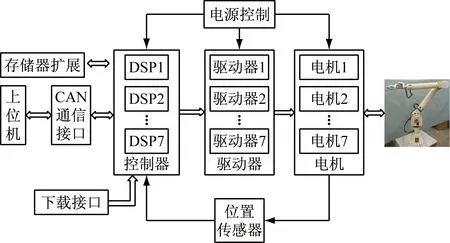
图37R机械臂控制系统原理框图
关节控制硬件主要包括DSP控制电路、电机驱动器、伺服电机(BLDCM)和角度测量装置四部分。机械臂关节控制系统结构如图4所示。
3 7R机械臂在实践教学中的应用
图5所示为自行研制的7R教学机械臂的实物图。在围绕其开发实践教学资源时,需综合考虑新形势下的机器人技术人才培养需求及现代实践教学特点,从拓宽视野、实践技能、综合素质及创新能力培养等方面入手。同时,在教学运行及组织过程中,还应多以项目驱动方式,提倡和鼓励学生进行自主学习,独立设计与开发实验,培养学生发现、分析、解决问题的能力及批判性思维。因此,以7R教学机械臂为研究对象,可从以下几个方面开展实践教学工作:
(1)认知训练。认知训练是通过针对7R机械臂的应用描述、演示以及拆装操作等内容,使学生了解机械臂的功能、结构、工作原理、控制方式、应用特点及适用场合,在拓宽视野和激发好奇心与想象力的同时,在一定程度上培养学生的实际动手能力。例如,在机械臂的示教功能演示中,学生可以在规定的范围内引导机械臂按预设的轨迹动作,再由程序记录机械臂的运行过程,最后由机械臂重复学生设定的动作。这不但可加深学生对机械臂示教功能的理解,还激发了学生的兴趣和创新意识。
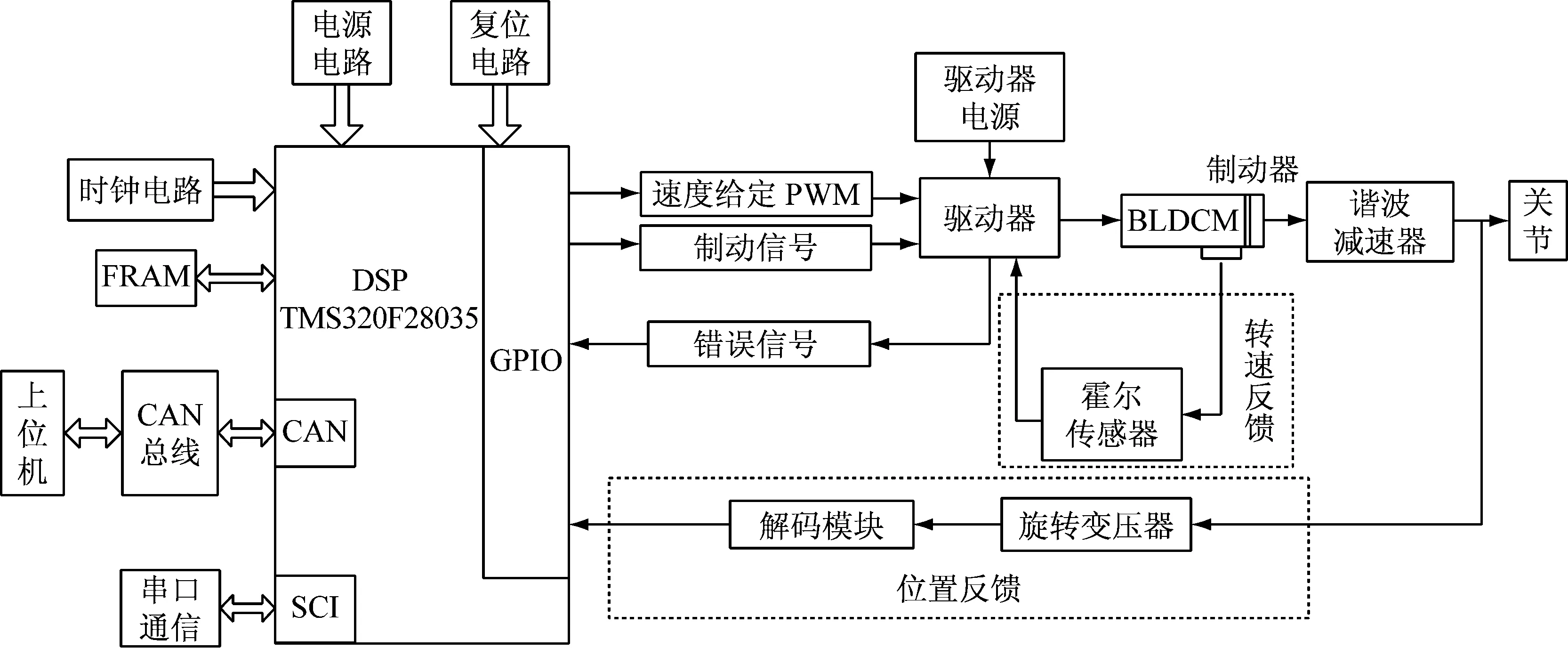
图4机械臂关节控制系统结构框图

图5 7R机械臂实物图
(2)基础操作训练。基础操作训练主要是借助于码垛、装配、打磨、焊接、抛光、避障以及其他特定要求等实例项目,进行参数配置、在线示教编程、手动操纵以及离线编程等方面的训练。其目的是通过实例训练,使学生具有操作7R教学机械臂的基本技能。例如,在离线编程及操作训练中,可选择写字或绘画作为训练内容,不但使学生掌握了机械臂的运动学、轨迹规划等理论知识和基本操作,将理论和实践结合起来,还通过机械臂按学生的书法或作品自动完成写字或绘画,给学生以成就感,进一步激发学生掌握机器人技术的兴趣。
(3)综合创新训练。综合创新训练主要是围绕7R教学机械臂,针对一些特定需求,以项目方式开展的训练模式。项目可分组进行,项目组成员需要根据特定需求,分析并制定解决方案,最后通过设计、加工、装配、调试等工作,完成项目。这种训练模式不但培养学生发现问题、分析问题、解决问题的能力和创新能力,还增强了学生的项目管理及组织能力以及团队协作精神,提高了学生的综合素质。例如,当被码放的物料由箱形变为袋形时的码垛改造,学生需要重新研发机械手爪,相应的控制系统也会改变,这些问题都需要学生去发现并逐项解决。再如,围绕7R机械臂开展视觉避障功能的改造,通过在机械臂末端加装超声波传感器或视觉传感设备,利用传感器及相应算法进行环境判断,当遇到障碍时,机械臂可自主更改轨迹,实现避障功能。事实上,在该7R教学机械臂上还可开发出更多类似的项目,但需要依据项目达到的指标要求而进行,因专业或学习对象不同而不同。
4 结 语
机械臂是涵盖机械、电子、机器人、控制、传感以及自动化等多学科技术交叉融合的产物。作者自行研制的7R教学机械臂及规划的面向不同层次、不同对象的实践教学内容及教学模式,可以将所学机器人相关理论知识与实践应用有机结合,在拓宽视野和培养操作技能的同时,还在培养学生自主学习、综合素质及创新能力方面具有重要意义。
参考文献(References):
[1]赵京, 卫沅. 机器人实验教学系统创新实践方法及应用[J]. 实验室研究与探索, 2015, 34(11): 210-212.
[2]于秀丽, 魏世民, 廖启征. 仿人机器人发展及其技术探索[J]. 机械工程学报, 2009, 45(3): 71-75.
[3]工业和信息化部. 工业和信息化部关于推进工业机器人产业发展的指导意见[J]. 新型工业化, 2014(4): 1-2.
[4]李金华. 德国“工业4.0”与“中国制造2025”的比较及启示[J]. 中国地质大学学报(社会科学版), 2015, 15(5): 71-79.
[5]周济. 智能制造——“中国制造2025”的主攻方向[J]. 中国机械工程, 2015, 26(17): 2273-2284.
[6]姬广凯. 大学生“创新创业教育”内涵建设实践与深化[J]. 实验室研究与探索, 2016, 35(8): 200-202.
[7]国务院办公厅. 关于深化高等学校创新创业教育改革的实施意见[J]. 中国大学教学, 2015(5): 4-6.
[8]胡波,冯辉,韩伟力,等. 加快新工科建设,推进工程教育改革创新[J]. 复旦教育论坛, 2017, 15(2): 20-27.
[9]梁明亮, 孙逸洁. 基于轮式驱动的教学机器人研制[J]. 实验室研究与探索, 2013, 32(2): 227-230.
[10]张波涛, 王坚, 吴秋轩. 机器人技术的实验教学改革与实践[J]. 实验技术与管理, 2017, 34(3): 199-201.
[11]郭东亮, 保延翔, 刘树郁, 等. 综合性大学自动化专业机器人实践教学体系探索[J]. 实验室研究与探索, 2017, 36(3): 212-216.
[12]岳龙旺, 邢晓柳. 高校机械电子工程专业机器人实践教学平台建设研究[J]. 科技创新导报, 2017(3): 160-163.
[13]张毅, 汪帮富, 王思明. 机器人创新工程实践教学改革与探索[J]. 教育教学论坛, 2016(51): 133-134.
[14]毛湘宁, 杜平安. 基于建构主义理论的机器人实践教学模式研究[J]. 实验科学与技术, 2012, 10(6): 79-81.
[15]王勇杰, 付铁, 刘宇佳, 等. 一种大臂偏置型7R机械臂的工作空间分析[J]. 机械传动, 2016, 40(8): 82-85.