振动形变观察演示仪的研制与应用
2018-04-11徐亚明
张 涛, 徐亚明
(武汉大学 测绘学院, 武汉 430079)
0 引 言
研究物体在振动时的形变非常重要,可以分析物体振动时的受力情况[1-2],为结构设计提供基础数据参考。另外,研究动物运动以及仿生学(例如昆虫翅膀振动)[3]也是一种观察振动物体形变的工作。在研究声学,例如扬声器[4]和乐器性能[1]时,也会分析物体的振动形变。通常这些物体的振动频率都比较快,一般从几十Hz到上千Hz,此时肉眼无法直接观察物体振动时候的形变,通常的方法是通过高速摄影机记录下来(数千到数万帧/s)[4],再以通常的播放速度(25帧/s左右)回放,才可以观察到振动形变。但是高速摄影机成本非常高,而且需要大功率照明才可以正常拍摄,一般的实验室难以配备。本文利用差频频闪技术,实现了用肉眼即可对高速振动物体形变的观察,同时可以用普通摄像机对高速振动物体的形变进行摄像记录,以低成本实现了以前只能用高速摄像机才能实现的高速振动物体形变观察。利用频闪来观察运动物体的方法并不罕见[1-6],但是加入频率探测部分进行振动观察的实例尚未见到。
1 原 理
振动物体的振动频率一般在几十到上千Hz,而且其振动频率主要由材料、形状、尺寸决定,其振动频率比较稳定,每次振动的过程也基本一致,因此,用一个闪光频率接近其振动频率的光源对其照明(例如比振动频率低1 Hz),由于每次振动与照明的频率差的原因,照明的时刻与振动位置的相位差即可在一个周期内顺序变化,而变化的频率正好是振动频率与光源闪动频率之差。这样即可顺序捕捉到振动物体一个周期内不同相位时的状态,连接起来正好是振动物体的连续形变。虽然物体振动频率没有改变,但是观察到的视觉振动频率却是振动频率与闪光频率之差(例如1 Hz),此时可以清晰观察到物体振动时各个位置发生的形变,同时也可以用普通摄像机进行记录,但因光源闪烁的,因此摄像可能会造成黑条、闪动现象,一方面可以通过加长曝光时间改善;另一方面,如果摄像机支持快门控制,可以将控制光源的信号直接或者分频后控制摄像机快门,以达到完全同步,保证摄像效果[7]。
首先用换能器(振动传感器或者话筒)对被观察的振动目标的振动频率进行测量,测量结果为f,然后合成一个频率为f-δ的信号,δ一般取值0.1~2 Hz,并以此信号控制光源的闪烁,即光源以频率f-δ闪烁。其亮起的占空比一般控制在10%左右,占空比太低,目标亮度不够,不易观察;占空比太高,则会引起观察目标模糊的情况。
设物体的任意质点的振动方程为:
A=acos(2πtf+ω)
(1)
式中:a为振幅;t为时间;f为振动频率;ω为初始相位。每个质点的初始相位不尽相同,则光源闪烁方程为(为简化,用正弦波表示,实际为方波,光源在高电平时亮):
L=bcos(2πt(f-δ))
(2)
实际设计是占空比可调的方波,让光源在高电平时亮,为简化分析,认为光源在L=1时亮,则光源亮起时,满足的条件:
式中:n=0,1,2,…。所观察到的振动物体的任意质点的状态为:
S=acos(2πf(n/2(f-δ))+ω)
(5)
再假设将物体振动一个周期的时间1/f平均分成f-δ等份,每段时间长度为1/(f(f-δ)),如果在每个等份时刻观察物体,则可以观察到物体的振动状态,且观察到的状态为:
由于δ取值很小(0.1~2.0),f值一般在几十到1之间,故f-δ、f、f-1三个数值非常接近,因此,f/(f-δ)与(f-1)/(f-δ)的值都接近于1,于是D的值接近于sin2nπ,而n为整数,因此D接近于0,即使当f=50 Hz,δ=2 Hz时,D的值也不大于0.01。可以认为,我们观察到的物体的振动状态S与其实际的振动状态S′是非常接近的,且所观察到的物体的视觉效果振动频率为δ。一般来说,δ取值在0.1~2.0 Hz之间,可以取得比较舒适的观察效果,当物体振动频率较高时,可以适当提高δ的取值,但一般不宜超过5 Hz,否则观察效果不好。特别地,当δ=1 Hz时,D=0,此时意味着S-S′=0,即所观察到的被降频的振动形变与原先高速振动形变时一致的。
故此,通过本方法,清晰准确观察到了物体振动时的形变状况,并可以用普通摄像机进行记录。
图1中,画出了物体振动频率为11 Hz(振幅为1的绿色实线),即f=11。光源闪烁频率为10 Hz(振幅为0.2的蓝色虚线),即δ=1,横坐标是时间,纵坐标是振幅。横轴上圆圈代表的是光源闪烁的时刻,此时对应于式(2)中L=1,‘×’符号表示在光源亮起的时刻,物体振动的状态;‘口’ 符号表示在物体振动1个周期内,将时间均分为10份,每1份时刻开始时的振动状态。可见,每1个‘×’符号都有‘口’符号对应,但是,由于物体振动频率和光源闪烁频率之间有略微差异,造成它们之间的相位差周而复始地逐渐变化,也就是,‘×’符号连接起来的红色点划线就相当于把物体振动状态在时间上拉长,即视觉上感觉到振动变慢,可以用肉眼观察到了,其视觉频率恰好为1 Hz,即物体振动频率与闪光频率的差频δ。
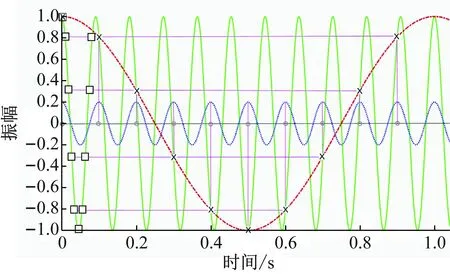
图1 物体振动频率、光源闪烁频率与观察到的视觉频率之间的关系
2 实 现
该仪器的实现关键有:① 跟踪振动物体的振动频率; ② 产生于物体振动频率接近的闪烁光源。由于物体振动是机械振动,同时往往引起空气振动产生声音,因此可以采用振动传感器或话筒等类型的换能器采集振动信号,然后进行频率分析。对于这两种方式都不易实现的振动而其振动频率又相对稳定的物体,可以采用手动调节频率的办法。
如图2所示,可以用换能器、信号调理器、单片机、开关组件、LED照明光源、以及电源和控制面板来实现。
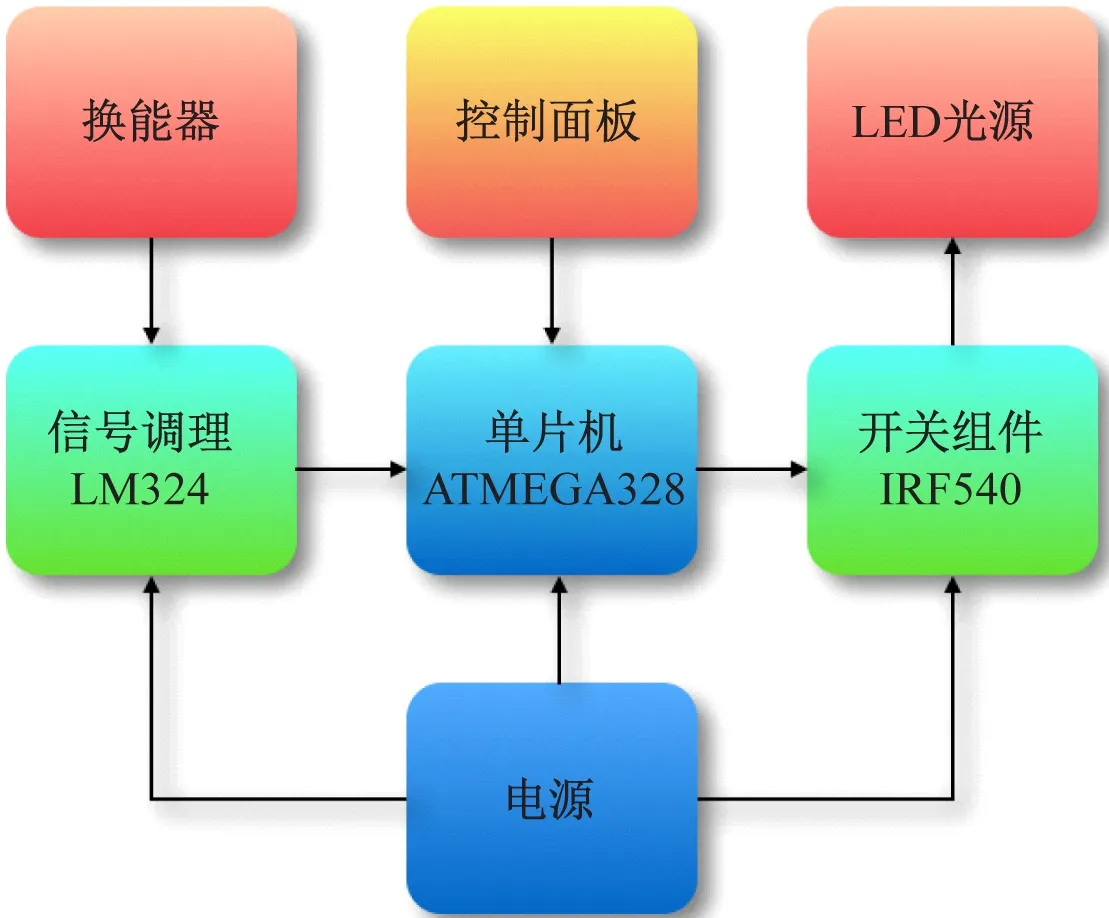
图2 振动形变观察仪结构图
控制面板的作用:① 控制信号调理器的放大倍数以及滤波截止频率;② 控制预设频率差δ以及光源的亮度;③ 在难以自动获取物体振动频率的时候手动调节闪烁频率。
对于可以接触到的观察目标,换能器使用振动传感器接触观察目标,以探测其振动频率。对于难以接触的观察目标(例如昆虫振动的翅膀),换能器可以用话筒,用以采集目标振动发出的声音,以检测其振动频率。
信号调理器用LM324运算放大组成[11],所实现的功能是换能器采集到的微弱信号进行放大,并进行滤波,一般来说,只保留1 kHz以下的信号,因为多数振动物体的频率在此范围内。
单片机性能要求不高,但一般需要带有计时器timer[9]。此处选用ATMEL的ATMEGA328。
经信号调理器处理后的信号送至单片机,单片机对其进行频率计数[13-14],得到其频率f,减去控制面板预设的频率差δ,得到光源闪烁频率f-δ,并根据该值控制单片机自身具备的计时器timer,使得计时器的输出信号的频率为f-δ,同时还根据控制面板设置的亮度设置计时器timer输出信号的的占空比。
开关组件由场效应管IRF540构成,单片机的计时器输出的信号控制开关组件,当输出信号为高电平时,开关组件导通,控制LED照明光源发光,当输出低电平的时候,开关组件截止,LED照明光源关闭。白色LED照明光源应当照射到被观察目标上。
按照这样的设计,白色LED照明光源的闪烁频率即可以比观察目标振动频率低δ,当δ为0.1~2.0时,肉眼可以清晰观察到振动形变的情况,并可以用普通摄像机或照相机进行影像记录。
3 结 语
本仪器通过频率相位差的原理实现了高速振动物体形变的肉眼观察,相比于高速摄影机观察分析法,本仪器具有成本低廉(约为高速摄影机成本的1/100),而且无需进行先摄像再观察,可以进行多人多角度实时观察,效果直观,也可以用普通摄像机进行记录。仪器核心部分集成度高,通过适当的外观结构设计,既可以制作成台式仪器在室内使用,又可以包装为非常轻便、方便携带的手持仪器,以适应各种复杂环境,不仅可以用于不同层次的教学演示,还可以用于科学研究。
参考文献(References):
[1]陈露,王效惠,李雪,等. 基于条纹投影的振动扬声器形变测量[J]. 光学与光电技术,2015(1):22-27.
[2]周建臣,耿兴国,林可君,等. 微液滴在超疏水表面的受迫振动及其接触线的固着-移动转变[J]. 物理学报,2014,21:320-325.
[3]陈科位,陈殿生,张自强,等. 翅膀对仿蝗虫机器人空中姿态影响分析[J]. 北京航空航天大学学报,2016(1):165-171.
[4]张承忠,叶邦彥,赵学智,等. 用于提琴琴弦三维振动测量的高速摄影系统[J]. 光学精密工程,2014,22(9):2329-2336.
[5]高胜利. 高速摄影在机械工程中的应用[J]. 机械工程,1990(6):13-14.
[6]张富琦. 高速摄影在生物工程研究中的应用[J]. 高速摄影与光子学,1991(4):434-437.
[7]李松. 频闪动态干涉法测量离面位移的研究[J]. 武汉理工大学学报(交通科学与工程版),2011(3):630-633.
[8]陈汇资,赵波,赵金坠,等. 杯形工具复合变幅杆设计及振动特性分析[J]. 振动与冲击,2017(9):159-165.
[9]ATMEL. ATMEGA 328 数据手册, http://www.atmel.com/zh/cn/Images/Atmel-42735-8-bit-AVR-Microcontroller-ATmega328-328P_Datasheet.pdf.
[10]黄改霞. 用莫尔条纹高速摄影机测量地震期间高层建筑物的振动和形变[J]. 高速摄影与光子学,1986(1):35-39.
[11]黄闽海. LM324四运放实用电路的设计[J]. 福建轻纺,2002(8):26-29.
[12]金宁宁,武燕,王燕霜. 基于AVR单片机输入捕捉功能的频率计设计[J]. 计测技术,2010,30(3):38-40.
[13]金锋,蒋少栋,徐子龙. 基于AVR的自适应等精度频率测量方法及实现[J]. 信息技术,2013(12):177-180,184.
[14]王亚彬. 频闪仪工作原理介绍[J]. 印刷世界,2004(8):36.
[15]黄旭弘,郭山河,崔博. 相位同步法观测转动物体状态的研究[J]. 物理与工程,2015,25(4):77-79.
[16]束维龙,黄学勤,程学仕,等. 正常声带原始振动定点数据研究[J]. 世界最新医学信息文摘,2017,49(17):78+86.