环绕器次表层探测雷达实时处理技术
2018-04-11范明意吕鹏
范明意,吕鹏
(中国电子科技集团公司第三十八研究所 合肥 230088)
引 言
探测行星地面及表层之下的液态水或者固态水,是行星探测活动最有意义的一项工作。而低频段雷达具有穿透星球表面的能力,是实现行星探测的有效途径。行星环绕器次表层探测雷达能够实现环绕轨道行星次表层结构高分辨探测,获取行星表层和次表层雷达回波数据,为深入研究行星土壤层、沉积层和冰层等地质结构提供科学数据。
次表层探测雷达系统在行星环绕器上,工作的轨道高度为几百km,要实现对行星地质结构成像的目标,就需要实现电磁波最好的渗透。由于距离远,地表下物质电磁波衰减比较严重。一般来说,低频段的穿透能力比高频段的穿透能力强。因此,在环绕器平台条件限制(发射功率限制)情况下,采用较低工作频段来获得足够的穿透深度。
在近10年间,火星探测雷达已经对火星的表面、次表面和电离层开展了广泛的探索。典型的火星次表层探测雷达包括欧州空间局(European Space Agency,ESA)发射的“火星快车”(Mars Express)上搭载的火星次表层电离层先进探测雷达(Mars Advanced Radar for Subsurface and Ionosphere Sounding Radar,MARSIS)[1]和搭载在美国国家航空航天局(National Aeronautics and Space Administration,NASA)发射的“火星勘测轨道器”(Mars Reconnaissance Orbiter,MRO)上的浅表层探测雷达(Shallow Subsurface Sounding Radar,SHARAD)[2-5]。
1 环绕器次表层探测雷达关键技术
环绕器次表层探测雷达如下图所示,是将探地雷达搬移到行星环绕器上,实现对行星的表面和内部结构的岩性、电磁参数及主要组成成分的探测。实际上,为了能够成功地实现探测任务,次表层探测雷达系统必须获得足够的方位分辨率,深度分辨率,信噪比(SNR)以及信杂比(SCR)。
针对行星的次表层探测应用,分辨率(包括顺轨分辨率及距离分辨率)应尽可能高,用以分辨目标分层回波和非天底洞的回波。实际上,方位分辨率是采用合成孔径技术实现的,采用此技术能够实现的分辨率与菲涅耳圆环的半径相关,在轨道高度一定的情况下,和工作波长相关。在自由空间中,距离分辨率为:。因此,为了提高分辨率,系统应提高信号带宽,并采用较高的工作频段。
在环绕器次表层探测系统中,杂波是指来自非探测目标区域的反射信号。当杂波和目标回波在同一个采样时间窗口,并且具有相同的谱特征时,杂波就和目标回波混在一起难以区分,见图1。
实际上,杂波主要影响次表层探测雷达对地表下回波的探测。由于地表下回波经过反射、透射及衰减效应,回波强度弱,地表杂波信号可能将地表下的回波信号掩盖,使得探测失效。另一方面,距离压缩造成的副瓣可能掩盖次表层的回波,而好的顺轨分辨率可以限制非星下点的散射回波。因此,为了提高在强地面杂波下对地表下弱回波的探测,需要实现低的距离压缩副瓣以及高的顺轨分辨率。
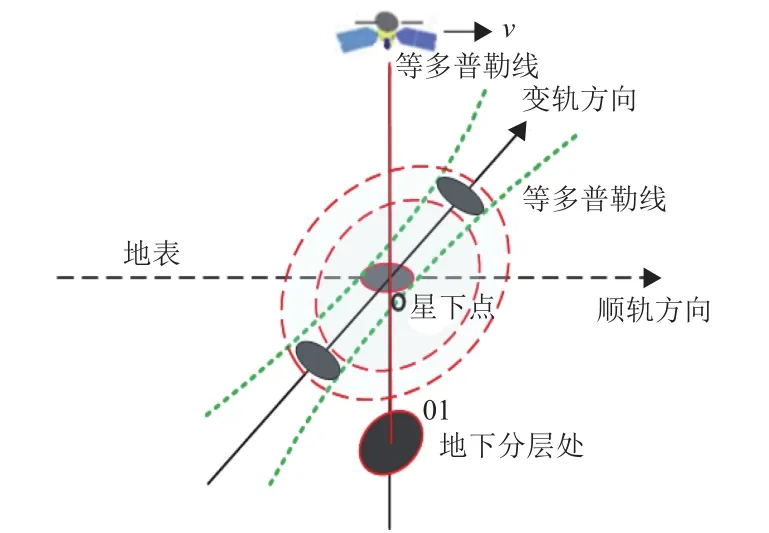
图1 环绕器次表层探测雷达杂波分布图Fig.1 Clutter distribution of a subsurface sounding radar
地表面区域到平台的距离随着平台的运动而变化,不同区域的距离变化量不一样,引入了从正到负变化的多普勒频率区间,利用该多普勒分布信息可实现顺轨方向分辨(见图2)。
1.1 精确的全链路失真补偿
收发通道及天线响应的增益或相位失真,都会导致接收到的回波与理想信号有大的偏差,直接导致科学探测的不确定性。另外,传播路径上的电离层也会使回波衰减且引入非线性失真。
由于通道特性具有一定的时间变化特性,主要跟温度变化关系较大,需要进行必要的实际测量才能获得,因此探测器在轨运行时需要实时定标测量获得发射通道和接收通道的响应特性,并与理想特性比较获得修正系数,并对接收回波进行相应的补偿,以获得与实际接收信号最好的匹配函数,从而得到高的脉冲压缩副瓣。
发射定标通过收发开关上的耦合器将发射样本按一定比例耦合到数字收发的ADC,进行数字采样,信号处理模块对采样信号进行分析处理,得到发射补偿系数,见(图3)。
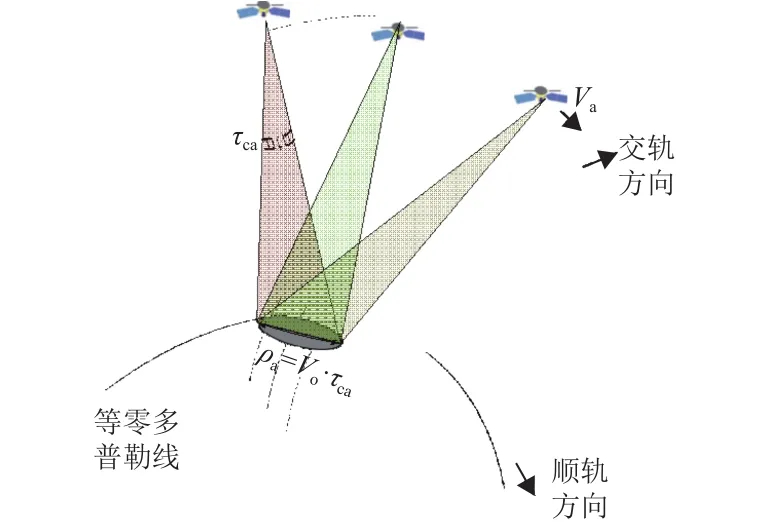
图2 利用多普勒信息提高顺轨分辨Fig.2 The along track resolution enhanced through Doppler processing
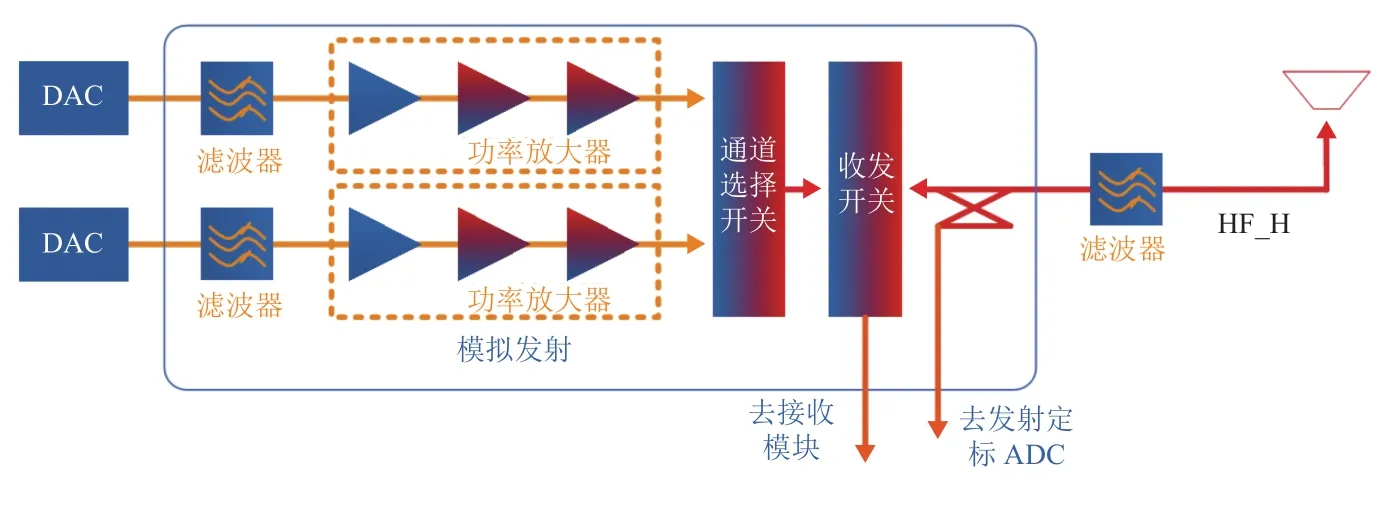
图3 发射定标流程Fig.3 Diagram of transmitting path distortion measurement
接收定标在收发开关与模拟接收之间注入测试信号,经接收通道滤波放大后到数字收发的ADC,进行数字采样,信号处理模块对采样信号进行分析处理,得到接收补偿系数,见图4。
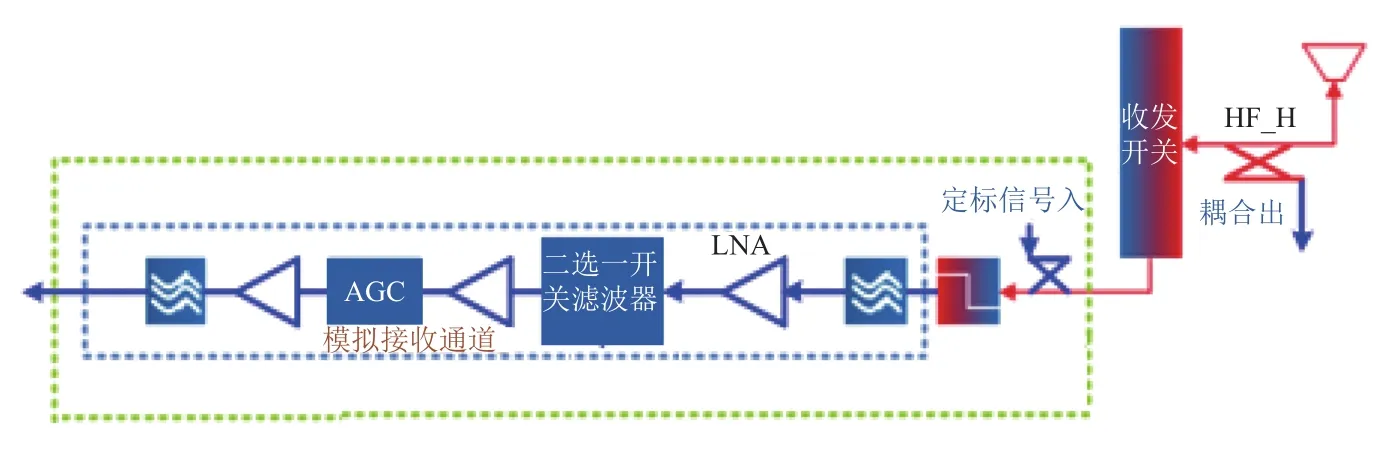
图4 接收定标流程Fig.4 Diagram of receiving path distortion measurement
由于雷达工作的频段很低,天线响应受地球背景的影响很大,在天线定标时需要将天线及所处的平台环境通过气球挂载升高到离地150米的空中,然后进行测试。通常认为天线本身是无源组件,其特性相对较稳定,在测试完成后不会有大的变化,地面测试的结果可以用到在轨运行时的特性补偿。
1.2 电离层补偿
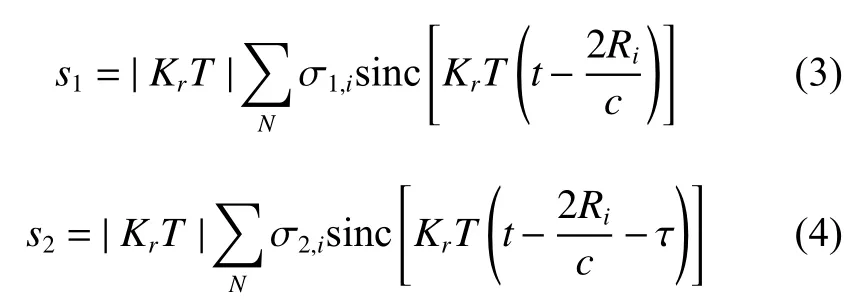
测高模式下发射频率为f1和f2的LFM信号得到的回波为

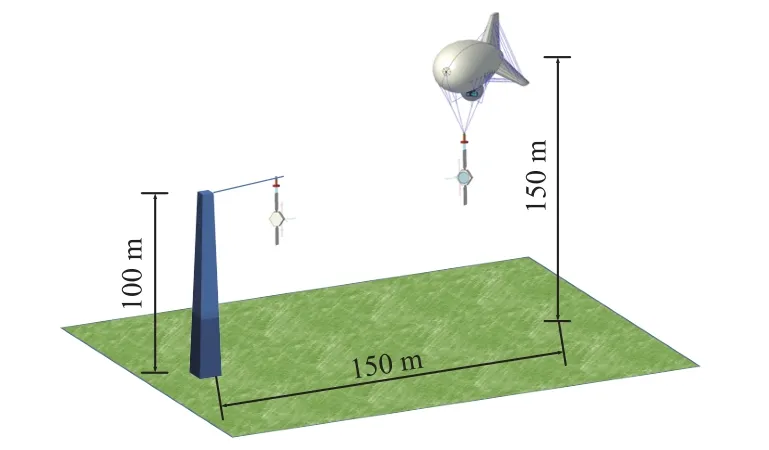
图5 天线定标流程Fig.5 Illustration of antenna distortion measurement
其中:σ1,i和σ2,i分别对应发射信号场景中目标的后向散射系数;τ为两组发射信号之间的相对时延;Kr为线性调频率;Ri为目标斜距。经过基带变换、脉冲压缩之后的信号为
对两路输出信号做互相关,通过计算相关系数的峰值就能得到回波相对时延的估计Δτ。
利用双频信号的时延差估计TEC的表达式为

根据电离层TEC,就能计算出不同频率信号的相位偏移量,进行相应的补偿。

火星电离层截止频率约为3 MHz,我们的雷达低频段工作在10~20 MHz,不会造成无法工作的结果,SHARAD的结果也印证了这一点。电离层误差主要影响脉压副瓣,同时会造成信噪比损失,相较而言脉压副瓣的影响对次表层探测更不利,可能导致数据解析的失败,而信噪比损失主要影响探测的深度,不会带来致命的结果。
在轨实时处理,需要在轨对电离层引入的相位误差进行实时估算,实际工作时,发射两个频率的脉冲信号,根据地面高度开窗采集回波,再对两组回波进行相关处理,计算相关峰的位置,得到两个频率回波的延迟时间,再根据延迟时间计算电离层电子总浓度,然后再根据不同频率计算补偿系数,并且将补偿系数引入到脉压参考函数中。这里假设电离层电子总浓度在一个相对较短的时间内具有缓变特性。
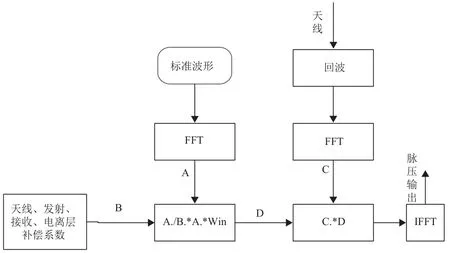
图6 脉冲压缩流程Fig.6 Pulse compression diagram
1.3 低副瓣脉冲压缩
脉冲压缩在频域进行,接收回波信号经频域变换后,乘以匹配函数,再通过反变换得到脉压结果。匹配函数的组成包含了发射补偿系数、接收补偿系数和天线补偿系数,还包括低副瓣加权系数,所有这些系数都在频域通过点乘组合在一起。
2 后向投影算法
次表层雷达的特点是成像场景非常小,只需要对星下的极小区域进行成像处理,卫星平台的运动与成像场景可以视为在顺轨方向的一个平面内,比较适合采用后向投影(Backproject,简称BP)算法。
根据每个成像点的坐标和卫星平台的坐标,计算两者之间的距离,假设卫星平台和星下探测区域都在顺轨运行的平面内,则第i个成像点与第m个脉冲时刻卫星平台位置之间的距离为

其中:(xi,zi)为第i个成像点在XOZ平面内的坐标,(xplat_m,zplat_m)为卫星平台在第m个发射脉冲时刻所在的XOZ平面内的位置坐标。
计算得到的距离需要与实际测高模式测得的星下点距离进行比较,将误差值进行修正,目的是对应实际的距离采样窗口。
修正后的距离为

其中,ΔR为计算值与实测值之间的差值。
相应的相位补偿系数为

3 后向投影算法的实时实现
BP算法在原理上容易理解,但实现效率比较低。假如在一个合成孔径长度为L,M×N个像素的成像区域进行成像,需要计算每个像素到每个天线位置的距离,对回波信号进行插值,完成像素矩阵的叠加。仅相干叠加的次数就有L×M×N次,这是非常巨大的运算量,因而使BP算法的应用受到限制,仅能用在较小区域的成像。而BP算法的优点是可以一边接收数据,一边进行成像处理,对原始数据的存储要求大大降低。这与其他的成像算法有重要的区别,在侦查、监视等领域很有用处,见图7~8。
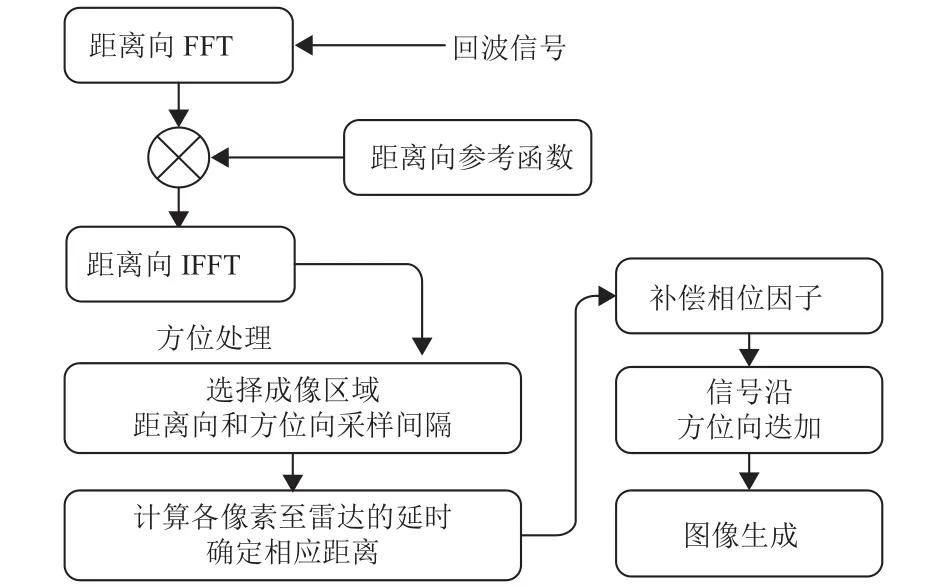
图7 BP处理流程Fig.7 Diagram of BP processing
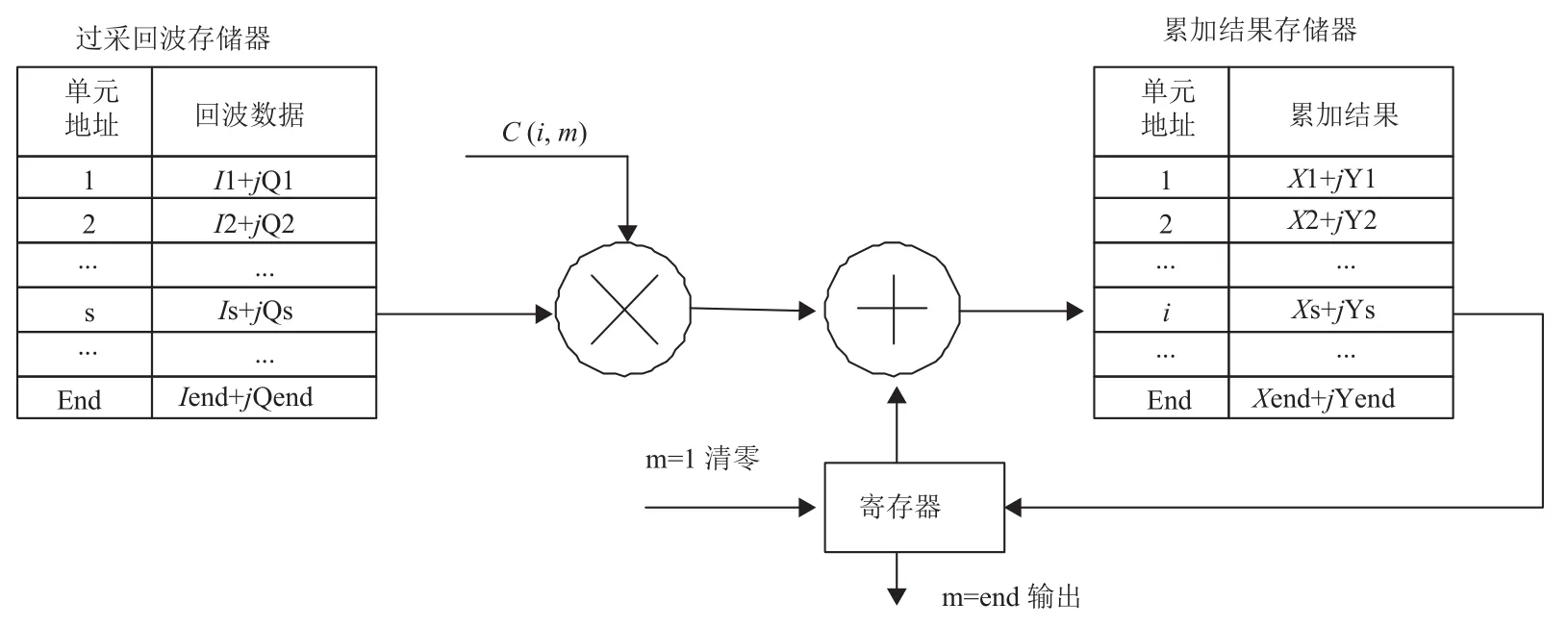
图8 BP处理在FPGA上实现框图Fig.8 Implement diagram inside a FPGA of BP processing
4 结 论
次表层探测雷达可以通过低频电磁波的穿透能力获取行星前表层的物理特征信息,在行星的科学探测中具有重要的意义。行星探测由于距离地球很遥远,使得回传数据率受到很大限制,导致了探测数据不可能传回到地面处理,因此对星上实时处理有很迫切的需求。另一方面,随着集成电路水平的飞速发展,星上实时处理能力在快速提升,选择合适的算法,星上实时处理完全可能在有限的资源约束下实现。
