火星车磁通门磁强计技术
2018-04-11赵琳杜爱民乔东海孙树全张莹区家明郭志芳李智冯晓顾少燃李峰
赵琳,杜爱民,3,乔东海,孙树全,张莹,3,区家明,郭志芳,李智,冯晓,顾少燃,李峰
(1. 中国科学院 地质与地球物理研究所 地球与行星物理重点实验室,北京100029;2. 中国科学院 地球科学研究院,北京 100029;3. 中国科学院大学,北京 100049;4. 苏州大学,苏州 215006)
引 言
磁场是描述火星的重要物理量之一[1]。火星磁场测量为研究火星壳磁场空间分布、磁场起源及其时间演化、与地质构造的关系,以及太阳风与电离层的相互作用等方面提供了重要的观测数据。预期取得的研究成果对于认识火星内部结构、火星空间电磁环境,以及火星大气和气候的演化过程具有重要的科学意义。
20世纪60年代,人类开始对火星磁场进行探测和研究,火星磁场的探测主要是通过在探测器上搭载的磁力仪对接近火星表面的磁场直接测量实现的[1]。获取有效磁场数据的火星磁场测量载荷信息如表1所示。
磁通门磁强计具有小体积、低功耗、低噪声、高分辨率、高可靠性等优势,是星载磁测载荷的首选,基于矢量补偿环型磁芯传感器技术和数字处理电子学技术的磁通门磁强计在深空探测任务中得到了广泛的运用。国际上,Venus Express磁强计[2]、Rosetta磁强计[3]、THEMIS磁强计[4]、Mascot磁强计[5]的探头都采用矢量补偿环型磁芯传感器结构,这种探头主要由德国布伦瑞克工业大学的地球物理与地外物理研究所 (The Institute for Geophysics and Extraterrestrial Physics,IGeP)研发,配套的磁通门数字电路的核心设计方案主要由德国Magson公司提供[4-6]。
1 磁通门磁强计关键技术
1.1 设计指标
火星车磁通门磁强计单机设计指标如表2所示。
1.2 基本原理及构成
磁通门磁强计是一种测量微弱静态或低频交变磁场的矢量传感器,由三轴磁通门探头和电子学单元组成,其中探头部分是相互正交安装的3组磁通门线圈系统,主要包括激励线圈、感应线圈和反馈线圈。基本的工作流程是利用驱动电路向激励线圈加载一定频率f0(约9.6 kHz)的对称脉冲激励电流,在每个激励电流脉冲作用下,磁芯被饱和两次,感应线圈将磁信号转换为电信号。传感器输出的任意偶次谐波均可作为被测磁场的量度,由于二次谐波幅值最大,故通常选取其二次谐波电压量度被测磁场。
火星车磁强计在配置上包括两个磁强计探头(含线缆)和1块电子学单元,两个磁强计探头用来采集磁场信号,分别安装于桅杆顶端(探头1)和桅杆底部(探头2),如图1所示;电子学单元主要为磁强计探头提供激励信号,并对探头输出信号进行低噪声放大、处理和传输,电子学单元安装在巡视器内部载荷控制器中。
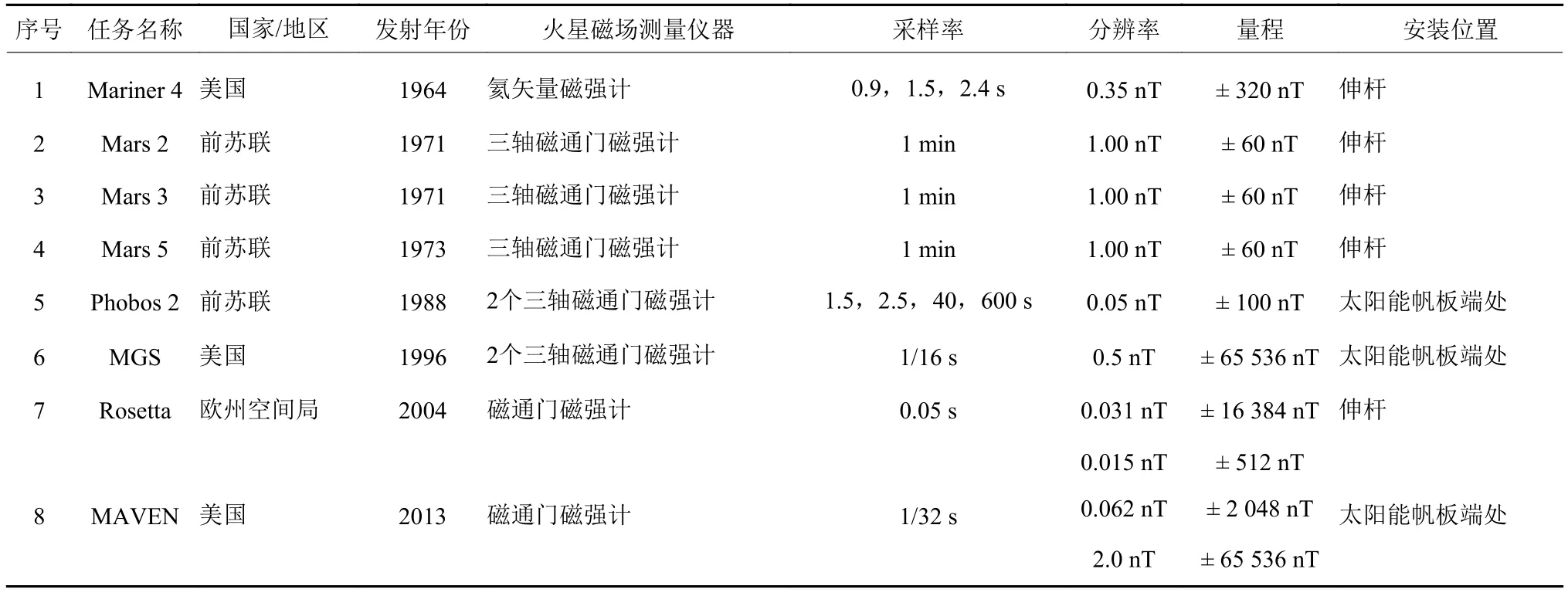
表1 火星磁测相关信息Table 1 Information of Martian magnetic field measurement
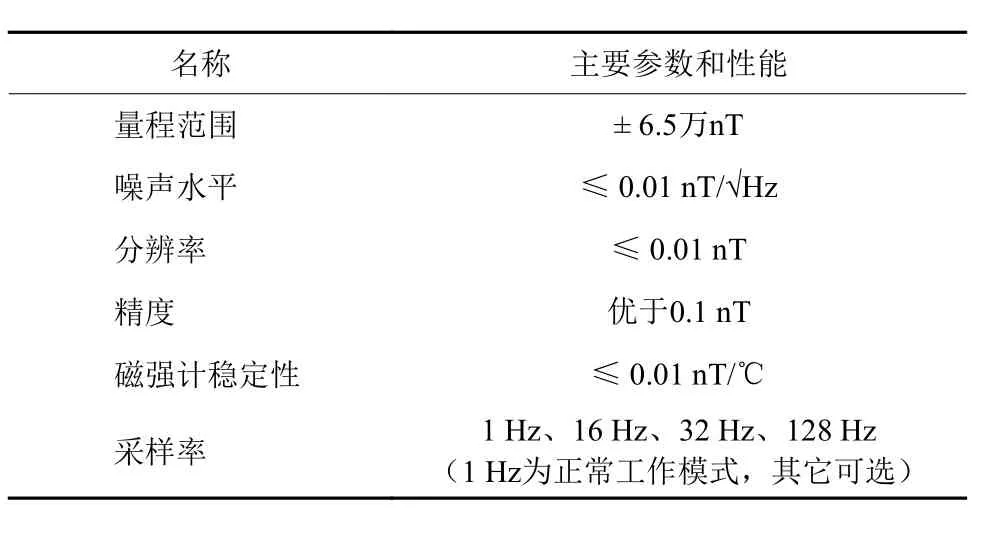
表2 主要性能指标Table 2 Main performance indicators
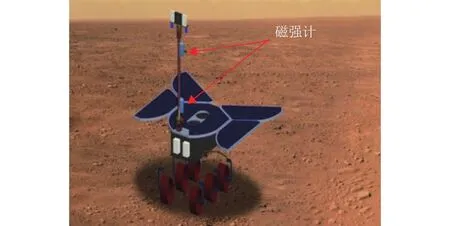
图1 双探头安装位置Fig.1 Installation position of the two probes
1.3 磁强计探头研制
火星车磁通门强计探头采用亥姆霍兹补偿线圈结构[7]。如图2所示,这种高精度的三轴同心结构传感器可实现空间中磁场的同点测量,能够消除梯度场带来的三轴矢量测量偏差,具有分辨率高、噪声水平低、稳定性好的优点。
探头主要由多组线圈(包括激励线圈、感应线圈和反馈线圈)、骨架和热敏电阻构成。其中,激励线圈采用环形结构设计,整个探头有2组垂直套叠的激励线圈,其环形磁芯骨架的直径为13 mm和18 mm,选用0.2 mm的漆包线单层紧密排绕。感应线圈由2组跑道型无骨线圈和1组环形无骨线圈组成,不同分量的感应线圈相互垂直。反馈线圈是由3组相互垂直且同心组装的亥姆霍兹线圈组成,主要作用是在通入反馈电流后产生三分量的补偿磁场,使磁强计探头中心点在零磁场附近。

图2 探头结构图Fig.2 Structure diagram of probe
探头研制过程中,主要优选热膨胀系数一致的材料,采用软件仿真和鉴定级试验相结合的方式来验证其热力学性能满足火星环境任务要求。
1.4 电子学单元研制
电子学单元硬件结构上由电源模块、现场可编程门阵列(Field-Progremmable Gate Array,FPGA)主控与信号处理模块、探头激励信号产生模块、感应信号采集模块、反馈模块和温度模块构成[8-10],如图3所示。载荷控制器为火星车磁通门磁强计单机提供 ± 12 V、+ 5 V、+ 3.3 V的二次电源,电路中各器件所需的电源由单机内部电源模块给出,FPGA主控模块控制外围芯片完成信号处理、指令解析、数据传输等功能。温度模块主要是用来采集探头和电路板的温度,实现磁测数据的温漂修正。

图3 数字磁通门模块构成Fig.3 Module of digital fluxgate
单机激励信号频率是9.6 kHz,采样频率为80~160 kHz之间,选用FPGA做主控,通过算法准确消除数字处理系统的量化误差,利用过采样和数字滤波方式来降低仪器噪声和功能[11]。采用D/A数字补偿,消除探头非对称引起的零偏信号或假信号,实现磁场动态实时补偿,以提高测量精度。通常,数字磁通门在大动态范围磁场测量中,常采用分档切换、精度调节的技术,这使得磁场测量数据出现跳变,但火星车磁通门磁强计采用FPGA数字反馈技术和探头线圈反馈结构相结合,实现了 ± 6.5万nT的全量程自适应测量,同时保证了单机分辨率优于0.01 nT(见图4)。
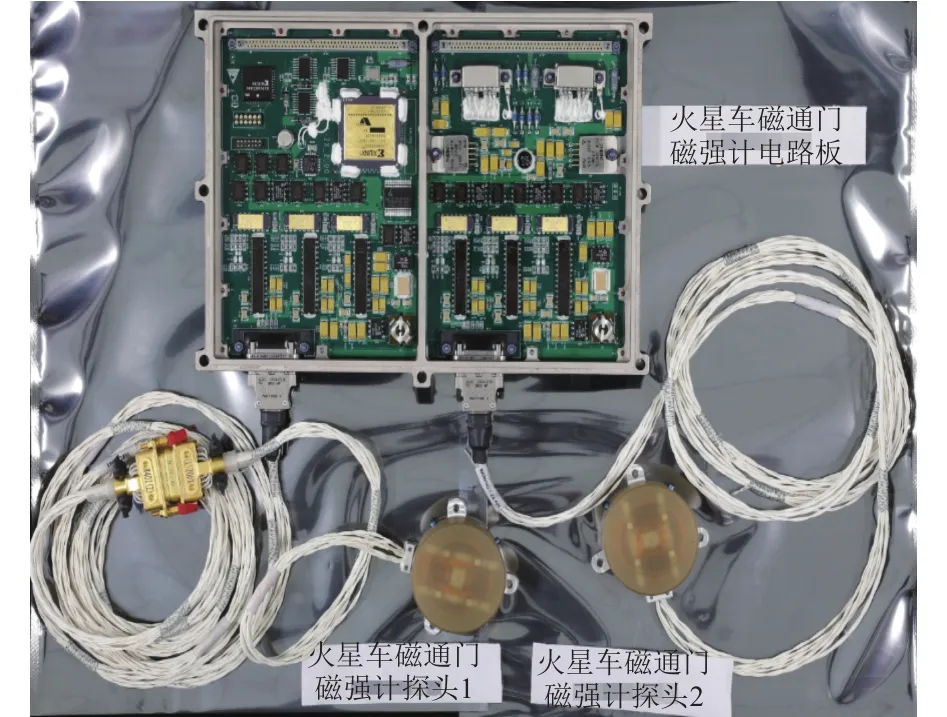
图4 火星表面磁场探测仪鉴定件实物图Fig.4 Identification parts of the ROVER fluxgate magnetometer
为适应巡视器载荷产品应用需求,火星车磁通门磁强计在保证探测精度的前提下,参照了Magson公司的硬件设计理念,采用全数字式电路方案替代传统的模拟电路方案,使得产品功耗降低至4 W以内,电路板(含外框)重量控制在610 g以内,实现了载荷产品的小型化、低功耗。
2 地面定标试验
在国防科技工业弱磁一级计量站(宜昌测试技术研究所磁学检测校准实验室)进行了火星车磁通门磁强计地面定标工作。
2.1 量程、线性度标定
首先,对每个探头每轴分别进行线性加场试验,将待标定磁强计探头放置在三维亥姆霍兹加场线圈内,利用磁通门磁强计校准装置产生稳定的磁场,全量程的加场范围为-6.5~+6.5万nT,每5 000 nT一个测试点,每个测试点记录有效数据不少于1 min,对数据进行线性拟合并得出拟合曲线公式B0=A*BX+C,其中,B0为标准磁场数据,BX为待标定磁强计探头测量值,A为比例因子,C为零偏。然后与标准磁场数据做对比,得出每轴的线性度、量程指标。
图5是火星车磁通门磁强计探头1的地面加场试验结果,数据显示探头1的三分量量程均达到 ± 6.5万nT,X轴、Y轴、Z轴线性度分别为0.016 %、0.017 %、0.020 %。
2.2 三轴正交度标定

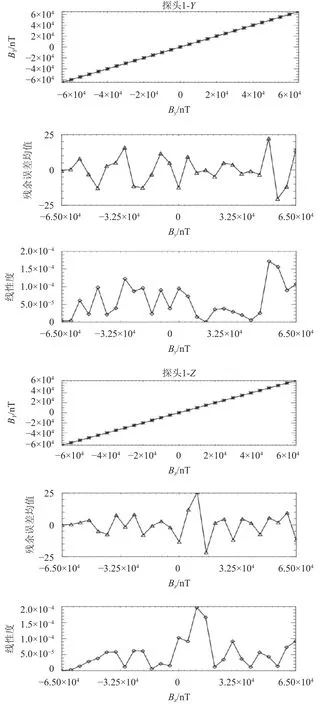
图5 探头1的量程、线性度Fig.5 Range and linearity of probe 1
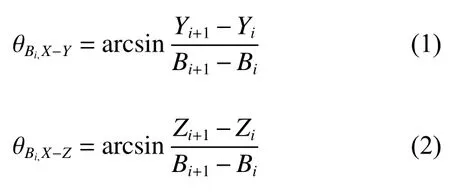
在相邻的两次对X轴的加场Bi和Bi+1下,利用公式(1)、公式(2)分别得到Y轴、Z轴与X轴之间的非正交性;同样在相邻的两次对Y轴的加场Bi和Bi+1下,利用公式(3)可得到Z轴与Y轴之间的非正交性。

在测试过程中,加场的标准磁场值从6.5万 nT变化到-6.5万 nT。选用一半的测试数据计算得到非正交性系数,然后利用非正交性系数修正磁场数据后,代入另一半测试数据,计算得到各轴间的正交性参数如表3所示。
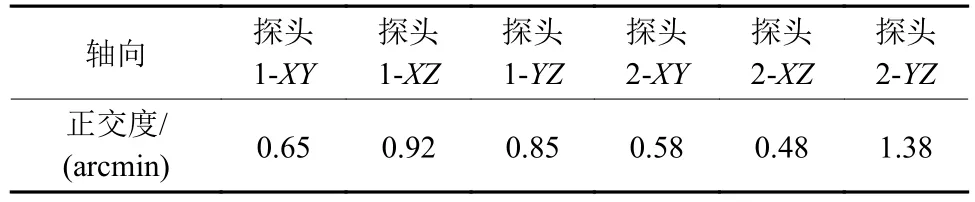
表3 标定后各轴向的正交性Table 3 Orthogonality of each axis after calibration
2.3 噪声水平、分辨率、精度标定
磁强计噪声水平的测试需要一个稳定、扰动小的磁场环境,一般要求测试环境的磁场扰动要远小于仪器本身的测量噪声。试验过程中将待标定磁强计探头放置在1.6 m长的圆柱形多层屏蔽筒内,屏蔽筒内部的噪声≤ 0.1 pT(5 Hz~10 kHz),持续测量30 min,记录三分量磁场数据。对测试数据进行FFT频谱分析,分别得到探头1和探头2的各轴噪声FFT功率谱密度谱图如图6~7所示。取1 Hz附近5点均值,得到探头1的X、Y、Z三轴噪声分别为0.006 3 nT/√Hz、0.003 2 nT/√Hz、0.005 1 nT/√Hz、探头2的X、Y、Z三轴噪声分别为0.003 0 nT/√Hz,0.004 0 nT/√Hz,0.007 0 nT/√Hz,两个探头的各轴分辨率均优于0.01 nT,精度优于0.1 nT。

图6 探头1 的FFT功率谱密度谱图Fig.6 The FFT power spectral density spectrum of probe 1
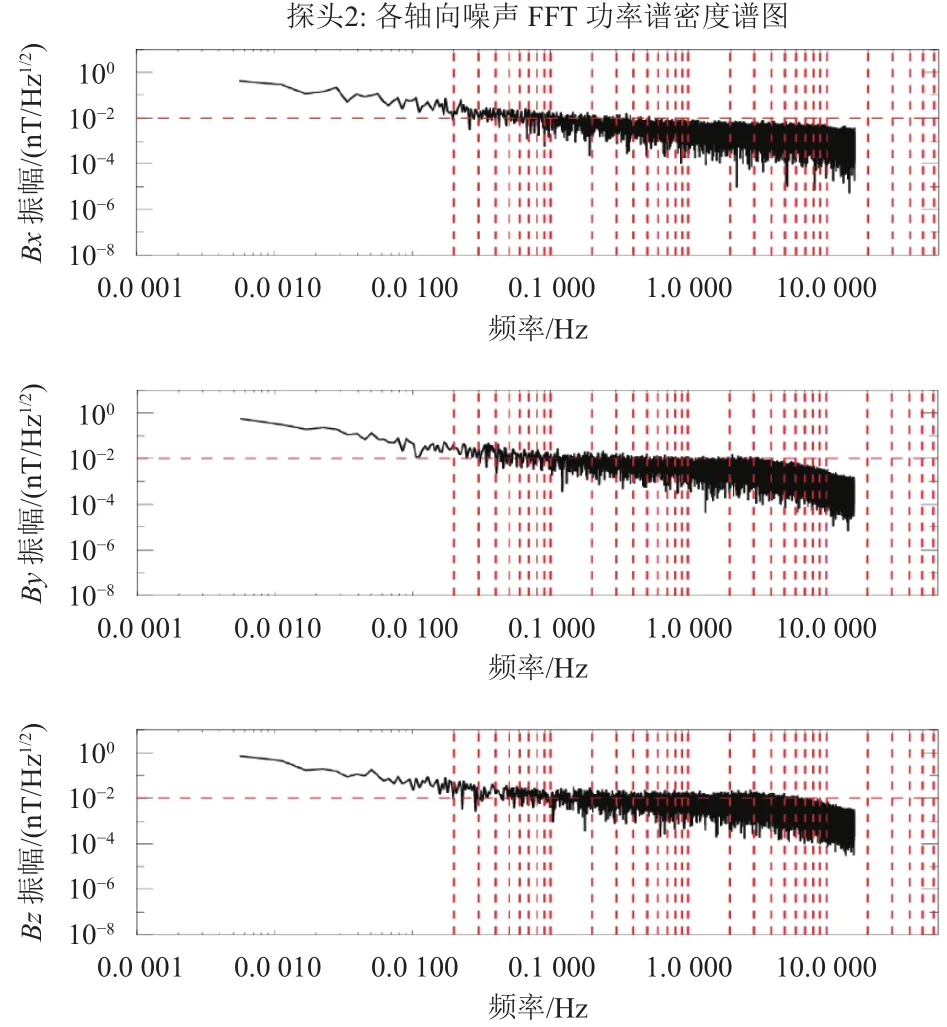
图7 探头2的FFT功率谱密度谱图Fig.7 The FFT power spectral density spectrum of probe 2
2.4 温度稳定性
将待标定磁强计探头放置在温控箱的工作区内,在工作区内复现零场环境。控制高低温调控箱内的温度每隔5℃变化,每个温度校准点测量时间长度不少于40 min,记录数据。
取温度较平坦段10 min数据,利用19 200个点计算磁场平均值,进一步利用公式(4)和公式(5)分别求得相邻温度点下磁场平均值的变化值和磁场温漂值,通过计算,火星车磁通门磁强计的温度稳定性指标优于0.01 nT/℃,具体见表4。
其中:Bvi为相邻温度点下磁场平均值的变化值;BT为相邻温度点下磁场温漂值。
3 结 论
开展了火星车磁通门磁强计单机的设计和研制工作,单机采用亥姆霍兹补偿线圈型探头技术和全数字闭环反馈电路技术,可实现空间磁场的高精度同点测量。通过地面定标,单机量程、噪声水平、分辨率、精度、稳定性指标满足设计要求,到达国际先进水平,与国际火星磁强计(MAVEN磁通门磁强计[12])对比,结果见表5。
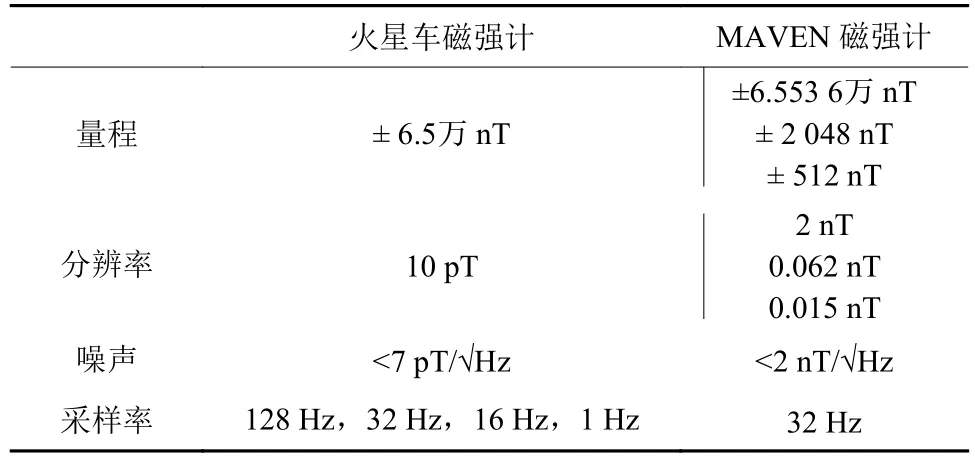
表5 与THEMIS磁强计性能比较Table 5 Performance comparison with the THEMIS fluxgate magnetometer
