主动式水下拖曳升沉补偿系统的非线性控制
2018-04-11李世振魏建华胡波李盛茂
李世振,魏建华,胡波,李盛茂
主动式水下拖曳升沉补偿系统的非线性控制
李世振,魏建华,胡波,李盛茂
(浙江大学 流体动力与机电系统国家重点实验室,浙江 杭州,310027)
针对主动式水下拖曳升沉补偿系统的非线性时变负载特性,设计一种基于扩展扰动观测器的非线性鲁棒位移控制器。在该控制系统中,将扰动负载分成时变的未知负载与可以建模的负载2部分,并考虑系统动力学的非线性特性,采用滑模控制技术补偿观测器估计误差,通过递推反步法设计主动式升沉补偿器的非线性鲁棒运动控制系统。基于实测的3~4级海况下母船升沉位移对所设计的主动式升沉补偿器开展实验研究。研究结果表明,所设计的控制器在存在负载扰动的情况下实现了精确、迅速且具有强鲁棒性的运动补偿控制,基于本文控制算法的主动升沉补偿器使负载最大升沉位移波动范围由1.40 m衰减至0.01 m,同时缆绳张力最大波动范围由15 kN衰减至1 kN以内,表现出良好的升沉补偿性能。
主动升沉补偿;扩展扰动观测器;非线性控制;位移控制;水下拖曳系统
深海拖曳船舶在海洋环境下拖曳作业时,船体受恶劣海况作用产生的升沉运动将带动处于拖曳状态的拖体深度变化,拖缆和拖体受到时变张力的反复变化,并随着工作海况的恶化而变化加剧[1−2]。拖体深度和拖缆张力的剧烈变化对拖体中各类传感器的正常工作产生不利影响,对拖体和拖缆的安全造成威胁,甚至出现拖缆断裂、拖体丢失等恶劣后果。国内外学者对海洋作业升沉补偿的研究始于20世纪60年代,首先应用于钻井船级半潜式平台等浮式海洋装备上[3]。随着海洋作业深度的增加及作业海域的扩大,升沉补偿系统在诸多大型海洋作业船舶上如大型海洋起重机、起吊装置、深海钻井平台、耙吸式挖泥船耙头装置及深潜器支援船等[4−9]得到应用。不同应用场合的升沉补偿系统所受到的负载特性及性能要求差距较大,对主动式升沉补偿器的控制器设计显得尤为重要。国内外学者对应用于水下深海拖曳系统的升沉补偿系统研究较少,且多为仿真研究[10−11],并未提供相关的真实实验数据。对于应用于轻型拖曳系统的主动式液压缸驱动滑轮组型升沉补偿系统,升沉补偿器的电液系统除了受到不规则海浪导致的水中非线性拖曳力及滑轮组的黏性阻力等强干扰以外,其本身动力学还具有强非线性和参数不确定性[12−13]。本文作者针对主动式水下拖曳升沉补偿系统的非线性时变负载特性,设计一种基于扩展扰动观测器的非线性鲁棒位移控制器。该控制器通过扩展的扰动观测器来估计因模型参数变化及未知负载干扰的控制补偿,同时采用滑模控制技术补偿观测器估计误差,通过反步法实现对系统的非线性位移控制。最终,所设计的主动式升沉补偿器的位移补偿性能在搭建的实验台架上基于实测的3~4级海况下母船的升沉运动数据进行实验验证。
1 系统描述和数学建模
主动升沉补偿器(active heave compensation, AHC)电液系统简图如图1所示,在深海拖曳系统中添加由活塞式单伸出杆液压缸(简称主动补偿缸)驱动的滑轮组,拖缆经过滑轮组后与拖体相连,系统通过高频响伺服比例阀驱动控制主动补偿缸的位移,进而驱动滑轮上拖缆收放实现主动升沉补偿功能。运动传感器(motion reference units, MRU) 检测船体或拖体的运动姿态,作为控制器的位移控制指令,液压缸位移传感器及压力传感器组成控制器的反馈信号。

图1 主动升沉补偿系统模型
升沉补偿器主动补偿缸的运动动态为[14]

忽略液压缸以及伺服阀的外泄漏及管道损失对系统的影响,则液压缸的压力动态模型为[15]



式中:q为伺服阀流量系数;s为系统供油压力;t为油箱压力;g( )为符号函数;v为伺服阀阀芯位移,负值表示阀芯位移与规定正方向相反。
由于伺服阀的频宽大于主级液压固有频率(3~5倍),忽略伺服阀的动态特性不会对模型的精度产生明显影响[16−17],可将芯位移v与阀芯指令之间的关系简化为

式中:k为阀芯增益;为伺服阀阀芯指令。

其中:
2 控制器设计
2.1 扩展扰动观测器设计



定义如下自适应律法则:
式中:1为正的常系数。

根据投影函数可以得出:

定义如下李雅普诺夫函数:

由式(11)和(12)可证明系统稳定:

2.2 非线性级联控制器设计
设计本文升沉补偿器,以位移跟踪作为外控制环,压力控制作为内控制环,采用滑模控制(SMC)来补偿估值误差,采用反步法以及ARC Lyapunov函数进行控制器设计。

昆明路地下综合管廊是某市重点民生工程、防汛应急工程和城建PPP重点项目,管廊全长3.74 km,采用双层五舱结构,上层为2个雨水舱,下层为综合舱、电力舱、燃气舱,建成后将给水、再生水、电线、光缆等管线全部入廊,进行“智能化”监控和管理。



定义半正定李雅普诺夫函数2:

由以上公式求得:



设计实际输出为

式中:3和3为正实数。求得
定义半正定李雅普诺夫函数为

求解的导数为



因此,所设计的双闭环系统具有稳定性,闭环系统中的扰动状态观测器可以确保所有系统信号的有界性。复合式升沉位移补偿控制的双闭环控制器设计框图如图2所示。
3 实验研究及分析
为了验证基于本文所设计控制算法的主动升沉补偿器的性能,搭建基于缩比模型的实验测试平台,如图3所示。该实验平台由模拟绞车2、主动升沉补偿器3、负载质量块1、液压驱动控制系统4、NI公司的PCI−6259采集卡5、下位机6、上位机7等组成,其中采集卡、上位机、下位机及MATLAB/Simulink软件组成XPC实时数据采集及控制系统,控制程序在上位机Simulink Real-Time环境下编写,然后由下位机实时系统运算执行,上下位机通过以太网通讯,采样频率为1 kHz。主动升沉补偿器的实验系统由伺服阀驱动液压缸组成。伺服阀选用Rexroth公司的型号为4WRPEH10−100 L/min的高频响伺服比例阀,10%指令下带宽大于100 Hz。液压缸最大行程max为 0.75 m,负载质量块质量为3 100 kg,该负载质量与实际拖曳系统的拖体(声呐发射拖体)质量相当。由于本文所设计的主动升沉补偿系统包含一套动滑轮组,有效补偿行程和系统负载力被放大2倍,所以,主动补偿缸最大升沉补偿行程为1.5 m,等效负载质量eq为6 200 kg。AHC基本参数如表1所示。
为了模拟负载在真实海浪中所受到的升沉运动,采用运动参考单元(MRU)对母船在海浪产生的实际姿态数据进行采集。图4所示为在中国南海海域实施的母船姿态测试系统,通过MRU、三轴加速度传感器、数据采集卡及PC机采集记录不同海况下母船的升沉加速度、升沉位移以及横摇、纵摇角度等姿态。母船主要技术参数如表2所示。所测得的3~4级海况下母船升沉位移曲线及其频谱图如图5所示,负载最大升沉位移约为1.4 m,主要频域段集中在0.1~0.2 Hz之间。实测的升沉位移曲线用于海况模拟绞车的位移指令输入,该模拟绞车由一伺服阀控制的液压马达构成位移闭环,以便精确地模拟真实升沉负载。

图3 AHC实验测试系统照片
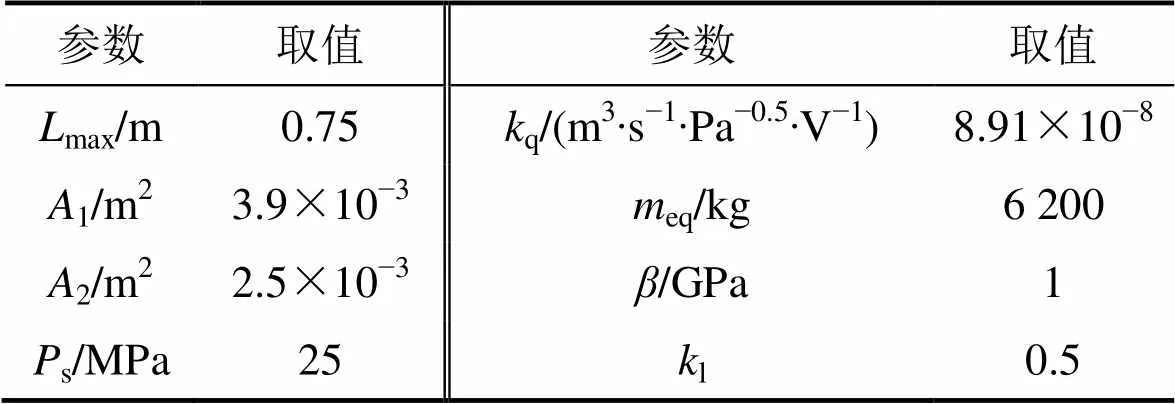
表1 系统模型参数
首先通过仿真得出控制器参数的大致范围及影响规律,最终确定如表3所示的控制器实验参数。为了对比本文控制器(控制器2)的效果,引入综合指令速度前馈的PID控制算法(控制器1)作为对比。控制器1如下式所示:

式中:xd为期望轨迹。

(a) 时域图;(b) 频域图

表2 母船主要技术参数

表3 控制器参数
图6所示为2种控制算法所对应的位移跟踪曲线及跟踪误差。对于最大升沉幅值1.4 m的不规则轨迹,传统PID控制(控制器1)跟踪误差约为0.04 m,但在高频频域段存在一定的抖动;本文所提出的控制器2的跟踪误差较小,跟踪偏差始终在0.01 m以内,且鲁棒性好,不存在高频抖动。基于本文算法的主动升沉补偿器补偿前后负载位移曲线如图7所示。从图7可见:在100 s后主动升沉补偿器开始工作,在控制器1的作用下负载最大升沉位移由1.4 m衰减至0.04 m,在本文算法控制器2的作用下负载最大升沉位移由1.4 m衰减至0.01 m。升沉补偿前、后负载位移实验对比见图8。从图8可见:缆绳张力波动范围由15 kN衰减至1 kN以内,控制器2相对于控制器1表现出更好的缆绳张力抑制补偿效果。

图6 不同控制算法下AHC位移跟踪性能及其跟踪误差实验对比
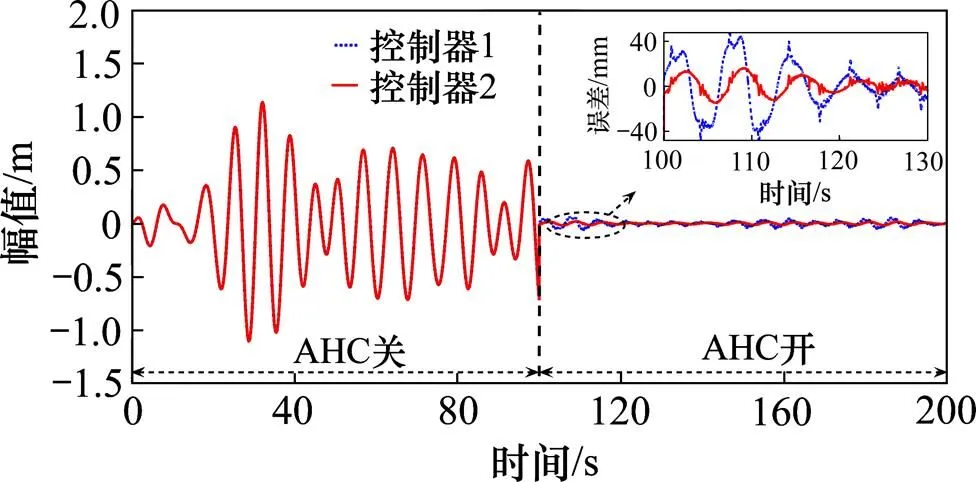
图7 升沉补偿前后负载位移实验对比

图8 升沉补偿前后缆绳张力实验对比
4 结论
1) 针对主动式水下拖曳升沉补偿系统受不规则海浪引起的非线性时变负载特性,设计了一种基于扩展扰动观测器的非线性鲁棒位移控制器。在该控制系统中,将扰动负载分成时变的未知负载与可以建模的负载分别进行补偿。基于上述2点并考虑系统动力学的非线性特性,采用滑模控制技术补偿观测器估计误差,通过递推反步法设计了系统的非线性鲁棒位移控制器。
2) 所设计的控制器在存在不规则海浪引起的负载扰动的情况下实现了精确、迅速且具有强鲁棒性的位移跟踪控制,基于本文控制算法的主动升沉补偿器使负载最大升沉位移由1.4 m衰减至0.01 m,同时缆绳张力波动范围由15 kN衰减至1 kN以内,实现了良好的升沉补偿性能。
[1] 裴轶群, 李英辉. 二级深拖系统的瞬态仿真及升沉补偿[J]. 上海交通大学学报, 2011, 45(4): 581−584. PEI Yiqun, LI Yinghui. Secondary deep-sea towed system's transient motion simulation and heave compensation[J]. Journal of Shanghai Jiaotong University, 2011, 45(4): 581−584.
[2] 王海波, 王庆丰. 水下拖曳升沉补偿系统设计及其内模鲁棒控制[J]. 机械工程学报, 2010, 46(8): 128−132. WANG Haibo, WANG Qingfeng. Design and internal model robust control of underwater towed heave compensation system[J]. Journal of Mechanical Engineering, 2010, 46(8): 128−132.
[3] WOODACRE J K, BAUER R J, IRANI R A. A review of vertical motion heave compensation systems[J]. Ocean Engineering, 2015, 104: 140−154.
[4] KUCHLER S, MAHL T, NEUPERT J, et al. Active control for an offshore crane using prediction of the vessel’s motion[J]. IEEE/ASME Transactions on Mechatronics, 2011, 16(2): 297−309.
[5] NEUPERT J, MAHL T, HAESSIG B, et al. A heave compensation approach for offshore cranes[C]// American Control Conference. Washington, 2008: 538−543.
[6] HATLESKOG J T, DUNNIGAN M W. Passive compensator load variation for deep-water drilling[J]. IEEE Journal of Oceanic Engineering, 2007, 32(3): 593−602.
[7] DRISCOLL F R, NAHON M, LUECK R G. A comparison of ship-mounted and cage-mounted passive heave compensation systems[J].Journal of Offshore Mechanics and Arctic Engineering-Transactions of the ASME, 2000, 122(3):214−221.
[8] KORDE U A. Active heave compensation on drill-ships in irregular waves[J]. Ocean Engineering, 1998, 25(7): 541−561.
[9] ELHAWARY F, MBAMALU G. Dynamic heave compensation using robust estimation techniques[J]. Computers & Electrical Engineering, 1996, 22(4): 257−273.
[10] 汤晓燕, 刘少军, 王刚. 深海采矿升沉补偿系统建模及其模糊控制仿真[J]. 中南大学学报(自然科学版). 2008, 39(1): 128−134. TANG Xiaoyan, LIU Shaojun, WANG Gang. Modeling of heave compensation system for deep-ocean mining and its simulation of fuzzy logical control[J]. Journal of Central South University (Science and Technology), 2008, 39(1): 128−134.
[11] 王海波, 王庆丰. 拖体被动升沉补偿系统非线性建模及仿真[J]. 浙江大学学报(工学版), 2008, 42(9): 1568−1572. WANG Haibo, WANG Qingfeng. Non-linear modeling and simulation of towed body passive heave compensation system[J]. Journal of Zhejiang University (Engineering Science), 2008, 42(9): 1568−1572.
[12] CHEN Z, YAO B, WANG Q. Accurate motion control of linear motors with adaptive robust compensation of nonlinear electromagnetic field effect[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(3): 1122−1129.
[13] DO K D, PAN J. Nonlinear control of an active heave compensation system[J]. Ocean Engineering, 2008, 35(5/6): 558−571.
[14] ALBERS P. Motion control in offshore and dredging[M]. Dordreche: Springer, 2010: 65−68.
[15] MERRITT H E. Hydraulic control systems[M]. Hoboken: John Wiley & Sons Inc, 1967: 141−147.
[16] GUO K, WEI J, FANG J, et al. Position tracking control of electro-hydraulic single-rod actuator based on an extended disturbance observer[J]. Mechatronics, 2015, 27: 47−56.
[17] PI Y, WANG X. Observer-based cascade control of a 6-DOF parallel hydraulic manipulator in joint space coordinate[J]. Mechatronics, 2010, 20(6): 648−655.
(编辑 赵俊)
Nonlinear control of active heave compensator for an underwater towed system
LI Shizhen, WEI Jianhua, HU Bo, LI Shengmao
(State Key Laboratory of Fluid Power and Mechatronic Systems, Zhejiang University, Hangzhou 310027, China)
To reduce the adverse effect of the unexpected vessel heave variation on the response of the underwater payloads, an active heave compensation system with a disturbance observer based nonlinear robust controller was designed. The proposed method was mainly focused on the disturbance arising from heave motion, which was divided into two parts. In addition, the outer position tracking loop was designed with sliding mode control to compensate for disturbance estimation error, and the inner pressure control loop provided the active heave compensator the force generator via back-stepping technique. Theoretically, the robust transient performance and steady-state control accuracy of the heave compensation system can be guaranteed by the controller. The active heave compensator with proposed controller was tested thoroughly on an experiment set based on the real measured heave data under 3−4 sea conditions. The results show that using the proposed controller achieves fast and precise tracking control, and the heave motion compensation performance is robust to unknown disturbance. The heave motion of the payload is attenuated from 1.40 m to 0.01 m with the irregular wave induced disturbance and the tension fluctuation of the cable range is suppressed to 1 kN from the original 15 kN.
active heave compensation; extended disturbance observer; nonlinear control; position tracking control; underwater towed system
TP273
A
10.11817/j.issn.1672-7207.2018.03.014
1672−7207(2018)03−0612−06
2017−06−24;
2017−09−18
国家自然科学基金资助项目(51221004) (Project(51221004) supported by the National Natural Science Foundation of China)
魏建华,博士,教授,从事电液控制理论及应用研究;E-mail: jhwei@zju.edu.cn
