压电柔性臂的ARMAX模型辨识降阶及最优极点移动控制
2018-04-10娄军强周优鹏廖江江李国平魏燕定
娄军强 周优鹏 廖江江 李国平 魏燕定


摘要:研究了压电柔性臂的系统模型辨识和振动主动抑制问题。基于自回归滑动平均模型(ARMAX,Auto-Re-gressive Moving Average Exogenous)确立了系统辨识模型,且其辨识精度高达97.9%,并采用平衡降阶法对高阶的辨识模型进行降阶,得到低阶模型,通过多频激励实验证实了降阶模型与实际结构具有较高的吻合度。针对柔性臂的振动控制,提出了一种基于线性二次型(Linear Quadratic,LQ)最优极点移动控制法,从求逆的角度,通过移动系统极点来确定LQ的最优状态加权矩阵Q,该方法简单有效地解决了状态加权矩阵Q和输入加权矩阵R的选择问题,具有明显的物理工程意义。试验结果证实了ARMAX模型对于压电柔性臂系统模型辨识的适用性及平衡降阶方法对模型降阶的可行性,并验证了线性二次型最优极点移动策略对柔性臂振动控制的有效性。
关键词:振动控制;系统辨识;压电柔性臂;最优极点移动控制;平衡降阶;
中图分类号:TB535;TP24 文献标志码:A 文章编号:1004-4523(2018)01-0132-08
DOI:10.16385/j.cnki.issn.1004-4523.2018.01.016
引言
随着空间技术的发展和制造业对轻质高速机構的要求不断提高,具有质量轻、能耗低及移动灵活方便等优点的柔性机械臂被应用到诸多领域。但是在外界干扰下,柔性臂极易引起持续的弹性振动,这严重影响了系统的定位精度和稳定性。近年来,以压电材料为代表的智能材料具有易与柔性结构集成为一体的优势,常用于柔性臂的振动主动控制研究中。系统动力学建模和控制算法设计是压电柔性结构振动主动控制技术中的两个基本问题,引起了国内外研究学者的广泛关注。
建立精确的系统动力学模型是设计高效控制算法的前提。基于实验数据的系统辨识法可以避免复杂的数学计算和理想化的假设,并很好地诠释系统动力学特性,是一种精度更高、效果更好的建模方法。自回归滑动平均模型由于考虑了噪声和随机干扰信号的影响,更符合实际工作环境,因而被许多研究者采用。Moore等对ARMAx模型作了理论上的阐述,并通过数值试验验证了其有效性。Bu等通过ARMAx模型与ARx模型在柔性臂模型辨识中的对比实验,证实了ARMAx模型的有效性。一般而言,ARMAx模型的辨识精度与其辨识阶数成正比,Afshari等通过试验激起了柔性臂的前三阶振动模态,采用ARMAx模型辨识,但是模型阶数却高达20阶。显然模型阶数的提高必然会增加系统模型的复杂度,甚至引入不稳定极点。而在实际柔性结构模型的实验辨识中,往往由于噪声干扰及高频模态的存在使得系统模型阶数较高,系统复杂化。故在辨识模型与柔性结构主模态一致的情况下,如何找到一个低阶系统使之与辨识系统具有几乎一致的频率响应特性,从而在保证模型精度的基础上实现系统降阶仍有许多问题需要深入研究。
为了实现柔性结构振动的有效控制,国内外学者提出了许多种控制方法,如PID控制、独立模态控制和速度反馈控制等经典控制方法;神经网络控制、模糊控制及最优控制等现代控制方法。在众多的控制方法中,线性二次调节器(Linear Quadrat-ic Regulator,LQR)具有形式简单、易于工程实现的优点,且拥有优于经典控制、不输于神经网络等智能控制方法的控制效果。LQR通过配置权重系数兼顾了柔性结构系统结构响应与致动器控制输出两方面的需求,是当前权重考虑下的最优控制。显然权重系数的选择对于LQR控制效果的影响很大,但是目前关于权重系数的选取上并没有具体的操作准则,具有很大的随意性。如果能够结合柔性结构的特征参数,提出一种物理意义明确、简单有效的权重系数配置准则,势必可以取得更好的控制效果。
本文针对柔性臂的振动主动控制问题,首先介绍了压电柔性臂实验系统原理。然后基于外源自回归滑动平均模型(ARMAX),通过数据采集板卡采集到柔性臂在扫频激励下的振动响应信号,辨识得到系统的模型参数。对辨识模型采用平衡截断的降阶方法进行了降阶处理,建立了系统的降阶模型,并验证了降阶方法的正确性。最后采用LQ最优控制法,从求逆的角度,提出一种极点移动法来确定最优状态变量加权矩阵,最终求得最优反馈增益矩阵K,通过仿真和试验验证了控制策略的有效性。
1系统描述
本文所涉及的压电柔性臂系统如图1所示。柔性臂为悬臂形式。在柔性臂的根部两侧面对称地贴有一组全桥连接的应变片传感器;两片压电致动器以并联的形式对称粘贴于柔性机械臂的两侧面用于激励或抑制柔性臂的弹性振动;安装在应变片和压电致动器之间的激振器主要是为系统提供一组随机激励信号。
振动测试过程中,由应变传感器检测柔性机械臂的振动信号,并通过全桥电路将应变信号转变为电信号,并经低通滤波器处理后,由动态应变仪(型号:AFT-095,放大增益5000)调理为可测电压信号,最后通过多功能多通道数据采集板卡(型号:NIPCI-6221(37pin))的A/D模块传送至计算机上。压电致动器的控制电压信号通过多功能多通道数据采集板卡的D/A模块输出,经压电驱动电源(型号:HPV-IC0150A0300D,放大增益15)放大后,施加于压电致动器上。激振器电压控制信号也是由多功能多通道数据采集板卡的D/A模块输出,经功率放大器放大作用于激振器。整个测试过程都是基于NI—LABVIEW数据采集平台,其实物装置系统如图2所示。
2系统模型辨识
系统模型辨识主要分为三个阶段:实验数据采集、系统模型选择和模型参数辨识。其中系统模型选择是系统模型辨识中的关键一步,直接关系到系统模型的准确性。考虑到现实实验环境中噪声及外界随机干扰的存在,引用一种时序模型:外源自回归滑动平均模型(ARMAX),从统计角度来揭示各时序内部的统计关系和各时序之间的统计关系。其数学模型如下
柔性臂和压电致动器的基本参数如表1所示。考虑到主阶模态的主导作用,本文仅截取柔性臂的一阶模态进行辨识研究。在本实验中,采用一幅值为3V,频率范围为0~5Hz的正弦扫频信号,扫频时间为10s,其采样频率为200Hz。借助MAT-LAB系统辨识工具箱对输入输出实验数据进行ARMAX辨识,辨识结果如图3所示。
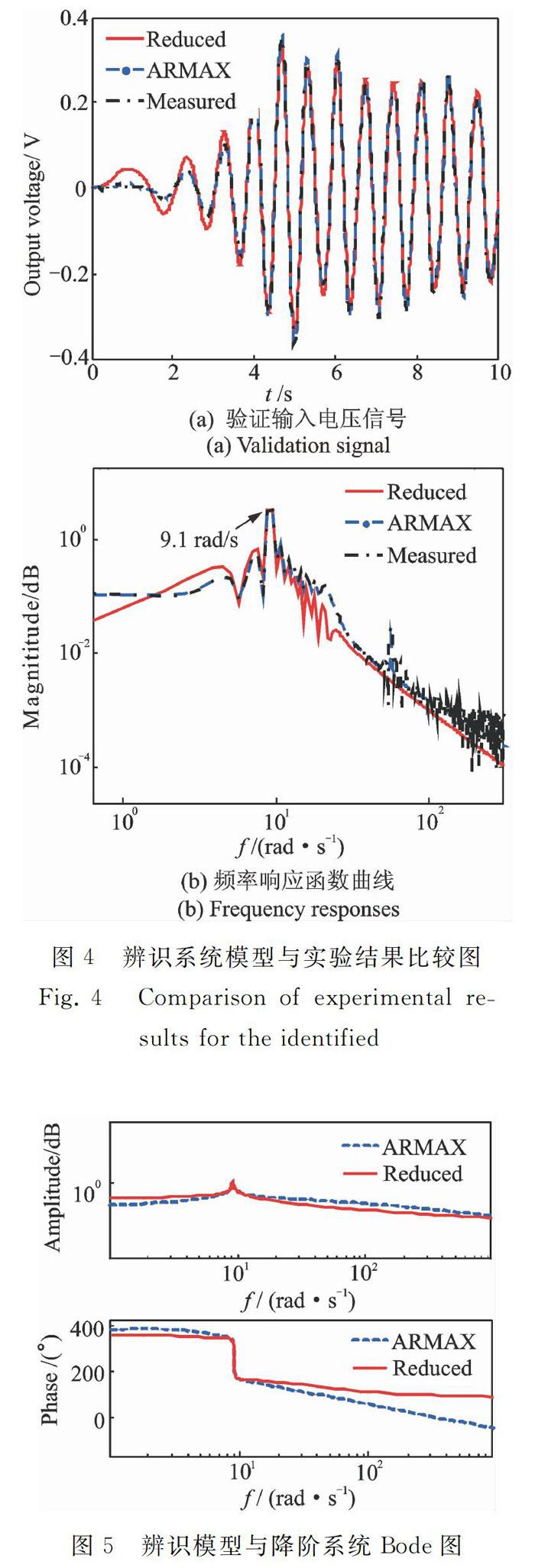
从实验结果可以看出:ARMAX模型与系统实验数据高度吻合,时域和频域曲线均反映了辨识模型的准确性,其匹配度高达97.92%,充分体现了ARMAX模型对于柔性臂系统的适用性。从系统的实测开环频率响应函数曲线图3(b)可以清晰地看出柔性臂的一阶固有频率为1.44Hz(9.1rad/s),在扫频范围内一阶固有频率占主导地位。通过模型参数辨识得到关于压电柔性臂系统的8阶AR-MAX函数模型,各项参数如表2所示。
3系统模型降阶
通过实验辨识,目前得到的模型虽然精度较高,但是阶次偏高,不便于控制器的设计;对于一个能控、能观、渐近稳定的定常系统,可以通过奇异值的大小来反映系统状态的综合可控可观性能:大的奇异值对应状态的可控可观性都很强,对系统的输入输出影响大;小的奇异值对应状态的可控可观性都弱,对系统的输入输出特性影响小,以此截去小的奇异值所对应的状态变量达到系统降阶的目的。本文采用平衡截断降阶法进行系统模型降阶。
以加载到压电致动器上的电压u(t)为输入变量,以传感器检测到的应变电压y(t)为输出变量,从能观的角度来定义系统状态方程,构造状态变量如下:
结合式(2)所对应的差分方程则可得能观下的状态方程:
其具体参数如表3所示。
为确认降阶模型与辨识模型以及实际系统之间的吻合程度,图4(a)给出了辨识模型与降阶模型的时域输出信号,同时也给出了各模型所对应的开环频率响应函数曲线如图4(b),并与实测的实验数据进行对比。从时域输出曲线及频响函数曲线对比结果可看出:系统降阶模型与系统实际响应具有较高的吻合程度,高达85.87%,其对应的Bode图如图5所示,降阶前后两个模型在其模态频率处是一致的,突出了平衡截断降阶方法抓住了系统的主阶模态频率,体现平衡降阶方法对辨识系统模型降阶的有效性。
为了进一步检验系统降阶模型与实际结构的吻合程度,图6给出了辨识模型与实际结构在一幅值为2V包含1,1.5及3Hz的正弦多频激励信号式(10)下的输出比对结果。图6(b)为多频验证信号激励下的辨识模型、降阶模型与实际结构输出结果对比。
表4给出了在扫频和验证两种实验情况下模型吻合度值。图4~6以及表4结果均表明:平衡降阶方法所得低阶模型与实际结构输出具有很高的吻合度,图6更一般性地说明了在多频信号激励下,降阶模型在保持系统一阶共振频率不变的情况下,其匹配度较扫频实验有了较高的提升,说明了主阶模态在振动中的主导作用,也体现了平衡降阶法对系统降阶的有效性及可行性。
4控制算法设计
針对柔性臂的低阻尼特性,其振动衰减将会持续很长时间,为加快衰减时间,在振动主动控制过程中,通常引入闭环控制环节来增大系统的阻尼,达到快速抑制振动的目的。为达到最优控制效果,往往在给定的初始条件下寻找一种控制规律,使得系统在规定的性能指标下具有最优值。线性二次型最优控制就是一种从状态量偏移平衡位置的大小及对控制信号消耗的能量两方面来权衡的最优控制算法。
对于完全可控降阶系统(8),线性二次型性能指标定义为式中
Q=QT≥0为状态变量加权矩阵,R=RT>0为输入变量的加权矩阵。
为使二次型性能指标最小,选择最优控制输入规律为
4.1加权矩阵Q,R的选取
在线性二次型最优控制算法中,加权矩阵Q,R选取的合理性直接影响控制效果的好坏。在二次型性能指标(11)中,第一项xTQx主要反映系统响应过程中偏离平衡位置的权重,第二项uTRu反映控制过程中消耗的能量;为实现最优控制,确定二次型性能指标达到极小值,对加权矩阵Q,R的选择,实际也代表了对系统控制效果和能量消耗两者折中选择。而通常对控制输入u的加权矩阵R取为单位矩阵I,最终只需调整状态变量的加权矩阵Q。
4.2加权矩阵Q的确定
从求逆的角度,通过移动系统的主导极点的实部至期望位置,虚部保持不变的方法来确定加权矩阵Q。设系统(8)的一对共轭极点为:μ0=η±jβ,期望极点为:σ0=τ±jβ。对于任意的极点μ0和σ0。满足最优条件:|τ|>|η|时,可得
由于柔性臂系统(9)极点非常靠近虚轴,也就是说,其开环阻尼效应非常弱,导致柔性臂系统的弹性振动要持续很长时间。为此,将极点的实部左移虚部保持不变,远离虚轴,以增大系统闭环阻尼,并通过二次型性能指标来衡量极点移动的距离。
通过以上二次型最优极点移动法得到的反馈控制系数,图7给出了在多频信号(0.5和1.5Hz幅值为2V的正弦电压)激励停止后,利用压电致动器对柔性臂的振动抑制的仿真过程。从应变片传感器检测到的输出电压可以看出:在多频信号5s激励停止后,施加主动控制,4s后柔性臂的振幅下降到±0.1V,此时默认为振动停止,与未加控制相比,大大缩短了柔性臂残余振动的衰减时间。
在相同的多频信号(0.5和1.5Hz幅值为2V的正弦电压)激励下,图8给出了控制前后柔性臂的振动响应实验曲线。从图8可以看出:在多频信号激励5s后,施加主动控制,在控制后的5s柔性臂的振幅降低到0.1V,而不施加控制时,20s后还有近0.2V的振幅,其所对应的频域曲线也可以看出,在其共振频率处,柔性臂振动得到了很好地抑制,大大降低了柔性臂残余振动的衰减时间。但是与仿真结果相比,由于噪声的干扰,其抑制衰减时间稍微长于仿真结果。
为了进一步二次型最优极点移动控制方法的有效性,利用电磁激振器的激励作为外扰激起柔性臂的弹性振动,其控制实验效果如图9所示。从图中可以看出:外界随机激励激起柔性臂的多频振动,在压电致动器的主动控制下,5s后柔性臂的振幅抑制在±0.1V,残余振动基本得到控制,振动衰减时间显著缩短,而不施加控制时,24s后其残余振动才能基本停止;从图9(b)可以看出,在外界随机激励下,柔性臂的前两阶共振频率都得到了很好的抑制效果,反映该控制算法对主阶模态的抑制作用,故提出的二次型最优极点移动控制策略是有效的,提高了柔性臂末端的定位精度。
6结论
(1)从系统模型辨识的角度研究了压电柔性臂系统模型的建立问题。采用ARMAx时间序列模型作为柔性机械臂系统参数模型,通过扫频实验得到了系统的辨识模型且其与实际系统输出具有较高的吻合度;在保持与原系统具有相同的动力响应特性下,采用平衡降阶法对高阶辨识模型进行降阶处理,得到了系统降阶模型,并通过多频实验验证了降阶模型与实际系统具有较高吻合度,充分体现了平衡降阶法的有效性。
(2)提出了一种线性二次型最优极点移动控制法,该方法从求逆的角度出发,通过移动系统极点来确定状态变量加权矩阵Q,并通过多频激励和外界干扰激励实验验证了该控制算法的有效性。
(3)本文主要基于线性离散系统,介绍了单输入单输出ARMAx模型辨识及平衡降阶方法,在振动主动控制上采用二次型最优极点移动法,均得到了较好的结果;针对多输入多输出系统,本文所介绍的方法也可以做进一步的研究。
