模糊自适应控制器在高压直流输电逆变侧的应用
2018-04-10张立伟安向勇樊习英
张立伟, 安向勇, 李 峰, 樊习英
(国网山西省电力公司经济技术研究院, 山西 太原 030006)
引言
随着西电东送以及全国联网的发展,高压直流输电起着越来越重要的作用。直流输电系统一个很重要的优点就是它的快速可控性,直流控制在直流输电系统中占有重要的地位,它决定着直流运行点的正常工作,协调整流和逆变的过程,对于整个直流输电系统起着至关重要的作用。对高压直流输电系统控制器的研究一般侧重于整流控制器的研究与设计,而研究设计先进的逆变侧控制器具有同样重要的意义。高压直流输电系统是一个典型的非线性时变动态系统,系统的运行工况随时都会发生变化,而且在大扰动下交直流系统间的相互作用特性十分复杂,这些因素使得常规PI控制器不能很好地满足系统的要求。针对目前传统HVDC控制器的特点及局限性,将模糊逻辑与PI控制思想相结合,设计了模糊自整定PI控制器,实现PI参数的最佳调整。
1 控制器的设计
1.1 模糊自适应控制器控制原理
模糊自整定PI控制器以误差和误差变化作为输入,可以满足不同时刻的对PI参数自整定的要求。利用模糊控制规则在线对PI参数进行修改,便构成了模糊自适应PI控制器。模糊自整定PI控制器结构如图1所示。
PI参数模糊自整定是找出PI两个参数与和之间的模糊关系,在运行中通过不断检测和,根据模糊控制原理,即利用模糊规则进行模糊推理,查询模糊矩阵表来对三个参数进行在线修改,以满足不同和时对控制参数的不同要求,而使被控对象有良好的动、静态性能。
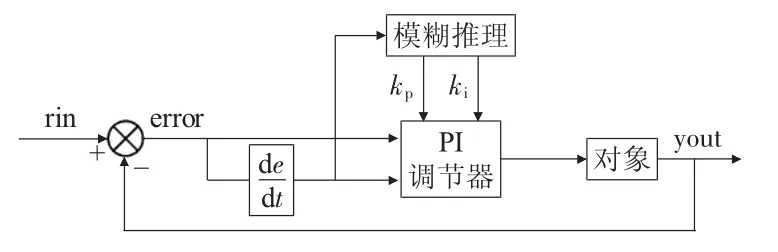
图1 模糊自整定PI控制器结构
模糊控制器由PI控制器和模糊自调整机构组成,它根据输入的误差和误差变化率通过模糊推理作出相应的决策,在线调整PI参数的大小。以误差和误差的变化率作为模糊控制器的输入量,以和控制量变化作为输出变量。这一过程的实现步骤为首先对每一次采样得到误差和误差的变化率进行量程转换,即分别乘以比例因子,然后进行量化和模糊化,将输入的物理信号值转换为输入论域上的点,最后经过模糊推理、反模糊化后输出和。进行修正后分别相加得到调整后的和参数,实现PI参数在线调整的目的。
1.2 PI参数模糊自整定原则
模糊自整定PI参数的目的是为了使参数和,随着偏差和偏差变化率的变化而自行调整,因而必须首先建立起它们之间的关系。根据实际经验,参数和在不同的和下的调整要满足如下调整原则:
1)系统启动瞬间,e为最大、ec为零,为加快系统的响应速度,应取较大的kp;为防止因e的瞬间变大可能引起的积分溢出,取ki=0;
2)在响应过程中期,e中等大小、ec较大时,为使系统静态误差尽快消除,应取较大的ki;为使超调小,kp取值应适当减小;
3)当响应接近标定输出值时,e很小而ec较大,为使系统响应的超调减小,系统性能稳定,应取较小的kp和较大的ki。
1.3 模糊控制器的设计
1.3.1 确定各变量论域、隶属函数以及去模糊方法
逆变侧:电压偏差及其变化率以及输出控制的变化量的量化论域均为{-3,-2,-1,0,1,2,3}输入输出的模糊子集均为{NB、NM、NS、ZO、PS、PM、PB},子集元素代表负大、负中、负小、零、正小、正中、正大。其隶属函数选择三角形隶属函数,去模糊方法采用加权平均法。
1.3.2 建立模糊控制规则表
根据对象的特性以及实际调节经验,总结出如下规则表:
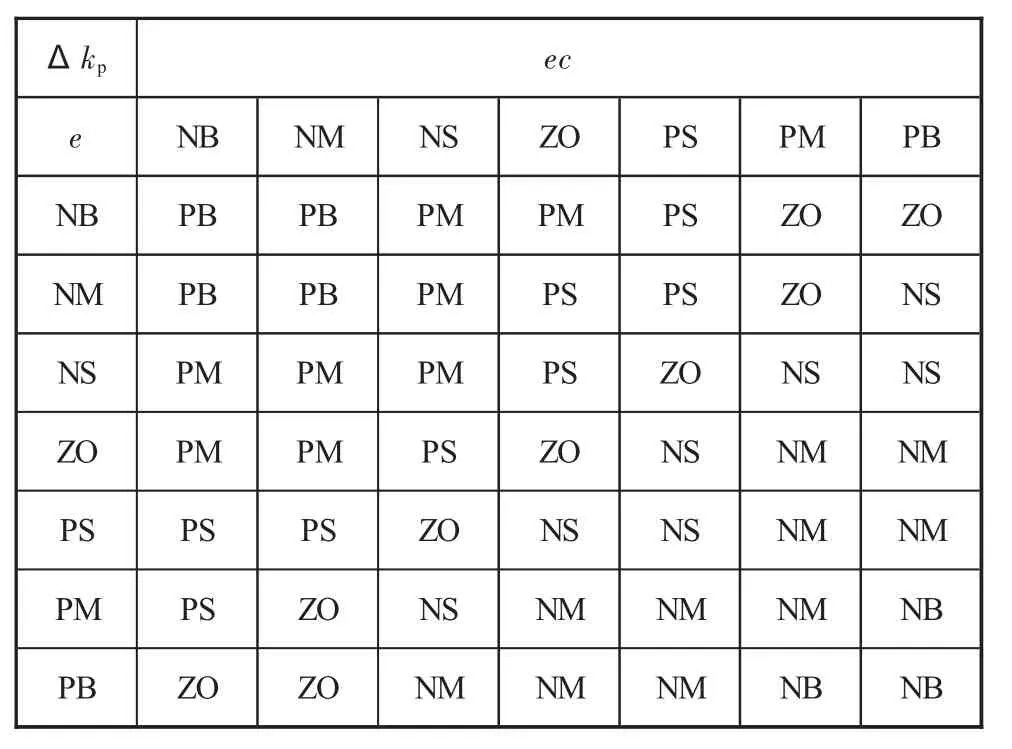
表1 kp模糊规则表
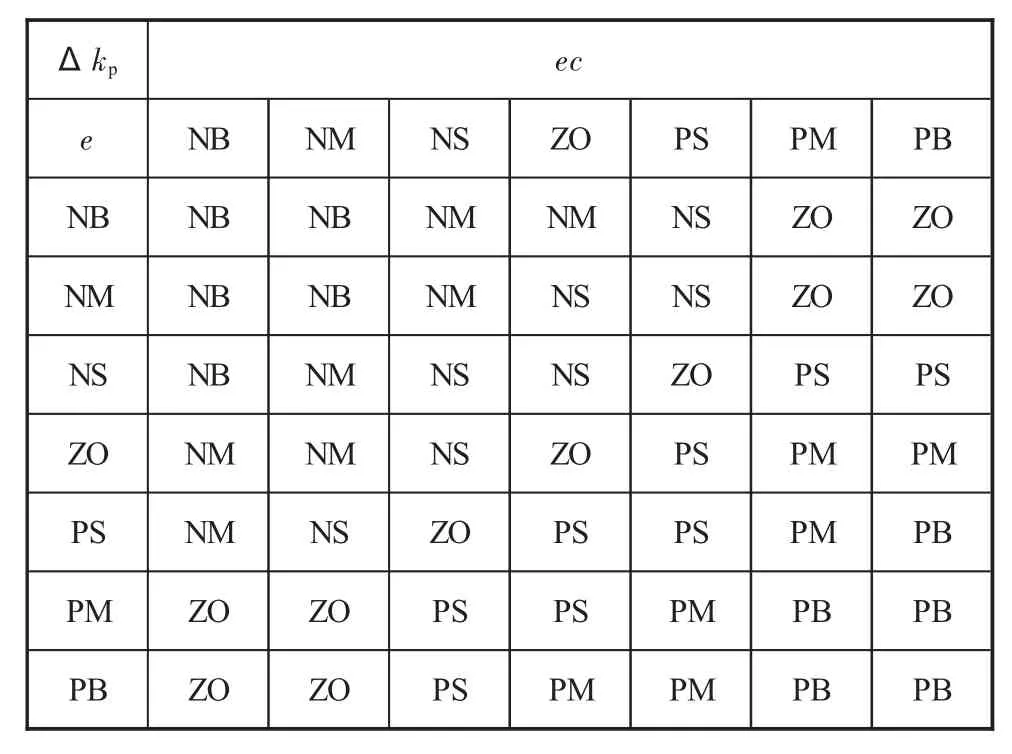
表2 模糊规则表
kp,ki的模糊控制规则表建立好以后,可根据如下方法进行,的自适应校正。
其中,k'p、k'i分别为当前控制器的整定值。
在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PI参数的在线自校正。
2 仿真分析
本文采用一个12脉波HVDC输电系统模型.模型如图2所示。
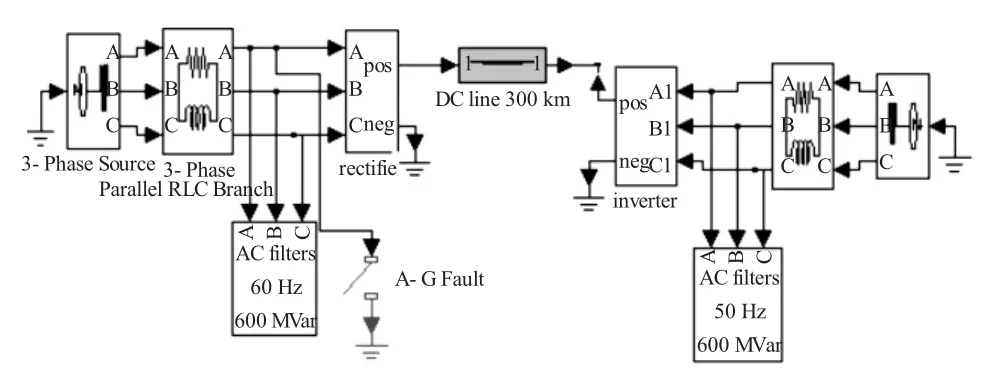
图2 12脉波高压直流输电系统仿真模型
Matlab中的Fuzzy-Logic工具箱提供了建立和测试模糊逻辑系统的一整套功能函数,根据上面所述,可以方便地建立所设计的模糊自适应PI控制器模型。模型如图3所示。
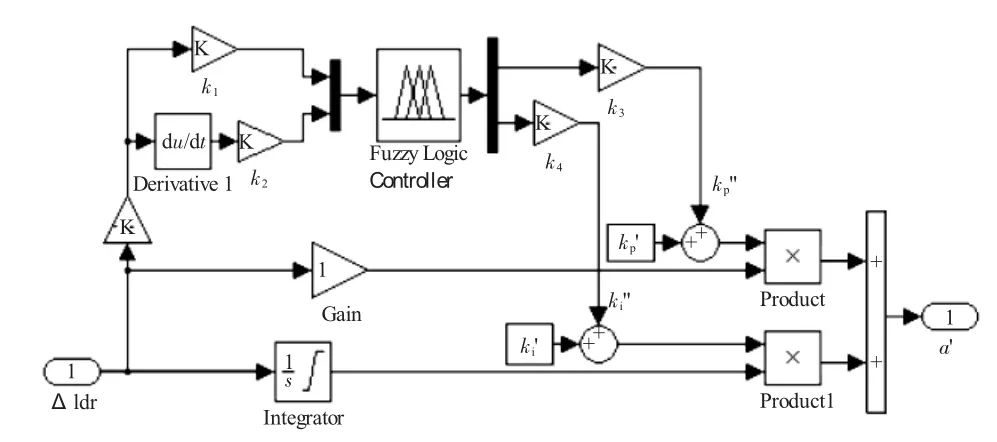
图3 模糊自整定PI控制器的设计框图
其中,k1、k2为量化因子,k3、k4为比例因子。在控制系统中,量化因子和比例因子的确定非常关键。实际的输入量为其变化范围为要求的模糊论域为[xmin,xmax],采用线性变换,则量化因子k=经过模糊化求得清晰值z0的变化范围为[zmin,zmax],实际控制量的变化范围为[umin,umax],采用线性变换,则比例因子
基于以上分析,对系统分别采用如下两种控制方式进行仿真:
1)整流、逆变侧均为传统PI控制;
2)整流侧为传统PI控制而逆变侧为模糊自整定PI控制。
整流侧交流母线对地故障时间设置为[0.6 s,0.62 s],整个仿真时间为1 s,仿真算法采用ode23tb。图4分别给出了在两种控制方式下,系统发生单相交流接地故障时的直流系统动态响应曲线。
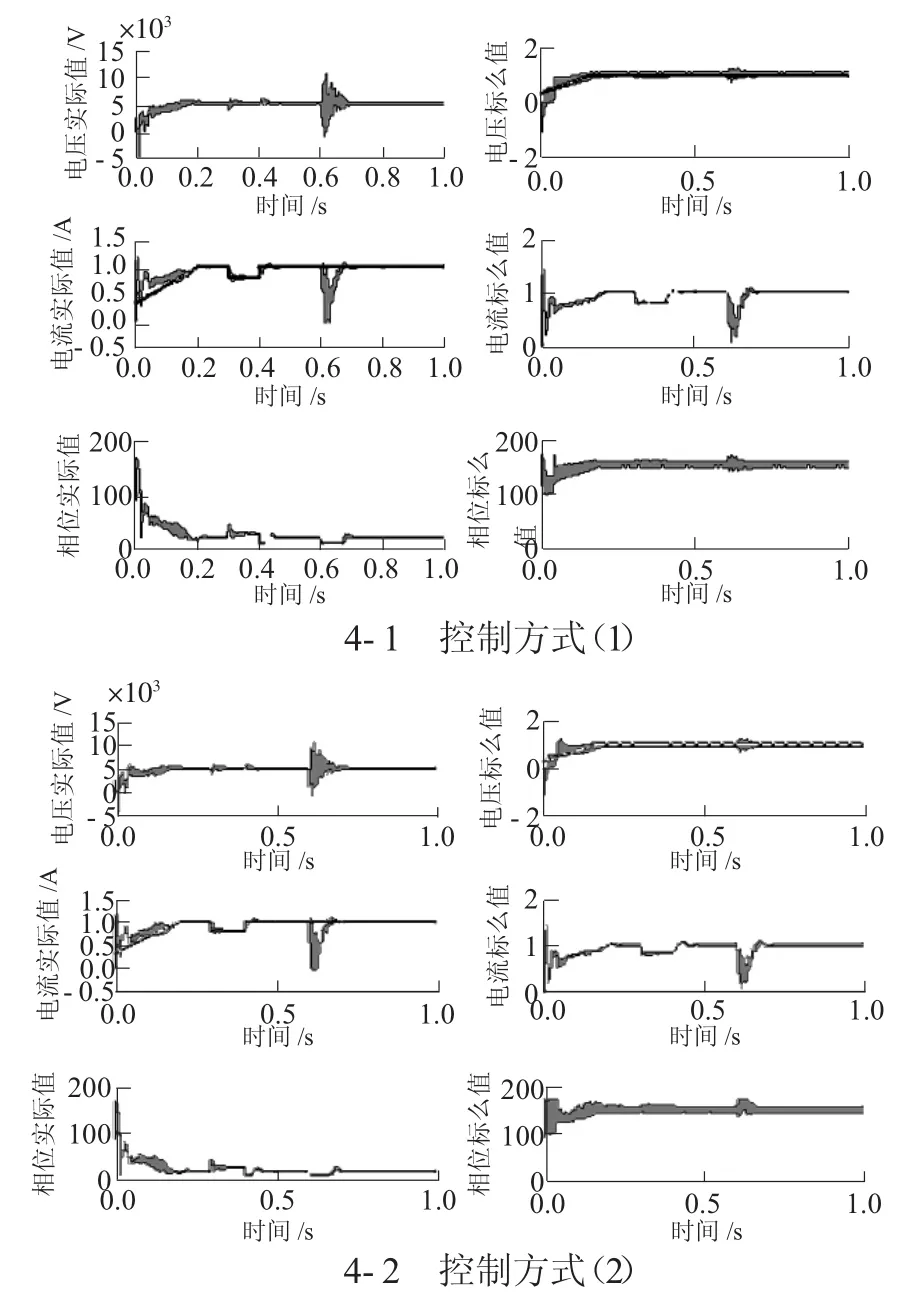
图4 直流线路单相接地故障时HVDC系统仿真曲线
仿真结果分析:
系统启动过程中,模糊自整定PI控制器控制的系统能更快速地跟随参考量的变化,并且超调也小;系统稳态运行过程中,在0.3 s,使电流参考值下降到0.8 pu,在0.4 s电流参考值恢复到1 pu。此期间,控制方式(2)下的系统能更快的响应系统的变化,恢复时间短,超调较小,由此说明,对于较小的波动,模糊自适应PI控制在精度和快速性方面满足系统要求;在0.6 s,发生交流线路接地故障,在0.62 s故障排除,控制方式(1)下的系统在0.71 s恢复稳定,而控制方式(2)下的系统在0.64 s即恢复稳定,并且超调量小于控制方式(1)。从仿真图可以看出,模糊自整定PI控制的系统动态响应曲线比较好,超调较小,响应速度快,系统遇到干扰时能很快地恢复稳态,这说明常规PI控制器中引入模糊控制确实能很好地适应系统要求。
3 结论
本文将模糊控制方法中的规则和推理机制应用于常规PI控制器的参数校正,从而获得了模糊PI控制器。该控制器不仅具有模糊控制智能化的特点,而且具有常规PI控制器结构简单、明确和实用等优点,因而具有较为重要的研究价值和较好的应用前景。仿真结果表明,模糊自适应PI控制具有较小的超调量,较短的调节时间,良好的动、静态特性,更好的适应性和鲁棒性,使得系统具有优于常规PI控制系统的跟踪性能和抗干扰能力。
[1]赵畹君.高压直流输电工程技术[M].北京:中国电力出版社,2004.
[2]Dash.P.K,Routray.A,Liew.Design of an energy function based fuzzy tuning controller for HVDC links[J].International Journal of Electrical Powerand Energy System,1999,21(4):422-428.
[3]Aurobinda Routray,P.K.Dash,SanjeevK.Panda.AFuzzy Self-Tuning PI Controller for HVDC Links[J].IEEE Trans on power electroncs,1996,11(5):669-679.
[4]A.Daneshpooy,A.M.Gole,D.G.Chapman,et.al.Fuzzy Logic Controlfor HVDC Transmission[J].IEEE Trans onpower delivery,1997,12(4):1 690-1 697.
[5]李国勇.智能控制及其MATLAB实现[M].北京:电子工业出版社,2005.
[6]谢书明,柴天佑.一种参数自适应模糊PID控制器[J].信息与控制,1998,27(4):12-15.